电调阀在铀浓缩工艺中的应用及工艺控制优化
2019-01-25杨小松张进荣刘太珍
杨小松,张进荣,刘太珍
(中核陕西铀浓缩有限公司,陕西 汉中 723312)
铀浓缩生产工艺中通常使用调节器作为级联压力控制设备。调节器是由多个部件组成的纯机械式闭环自动调节装置,具有良好的自动调节和抗压力扰动性能。但调节器正常运行需要稳定、清洁的压缩空气作为动力,同时需要零位系统提供压力参考基准。由于压缩空气及零位系统是较为庞大的系统,建设及运行维护成本较高;压缩空气和零位系统的存在,使整个工艺系统更加复杂,也给级联稳定运行带来了更多风险。随着科技发展,尤其是自动控制技术和机电技术的进步,使用电动机作为伺服机构的调节阀已经在工业系统中广泛运用。为了简化系统设置、优化工艺流程,设计研制了基于PI控制的电调阀,用于替代调节器控制级联系统压力,并对电调阀的控制方式及性能进一步优化,以满足工艺需求。
1 电调阀工作原理
电调阀工作原理如图1所示。以实时测量值PV与设定值SV的偏差作为电调阀控制模块的输入,经过运算后,控制模块向执行机构输出电调阀开度控制值,执行机构根据得到的数据调节被控对象,再通过测量变送器将实时测量值反馈给控制模块[1]。

图1电调阀工作原理示意
目前,电调阀控制模块为常规PI控制模块,PI控制系统的原理如图2所示。

图2常规PI控制系统原理示意
PI控制属于线性控制,以系统给定值r(t)与实际输出值c(t)的差值作为控制偏差e(t),通过对偏差进行比例、积分运算,将结果合成后作为输出控制量,其控制过程以传递函数表示为
(1)
式中:G(s)为传递函数;U(s)为输出值;E(s)为系统偏差;Kp为比例控制环节系数;Ti为积分控制时间常数。
比例环节主要将系统偏差按照比例系数进行放大,系统存在偏差,控制器即对其进行控制,以减小偏差[2]107-108。控制系统设定较高的Kp系数,可以提高系统的响应速度。当系统的超调量较大时,则应减小Kp参数值,从而提高系统的稳态精度。同时,降低Kp会使系统对输入偏差的响应速度减小。
积分环节的主要作用是消除控制过程中的余差,提高系统的稳态精度[2]108-109。当偏差信号产生时,控制信号会不断增加,从而消除偏差;当偏差信号逐渐缩小时,控制信号也逐渐趋于恒定。积分控制作用的强弱与积分控制时间常数Ti的设置有关。时间常数设置越小,积分控制对系统的影响越明显。控制系统中,增加积分控制环节,可以提高系统应对外部扰动的能力,提高系统的控制精度。由于积分作用的存在,控制过程中的信号偏差会产生一定程度的延迟,延长了控制时间。当积分效果过于强势,则可能导致系统输出震荡。
在系统控制参数设定过程中,需要根据实际情况,对PI参数值进行设定,以达到最优的控制效果。
电调阀的PI控制采用DCS系统中的PI模块,是一种数字式PI控制器,对于式(1),以k个采样时间kt表示连续时间t,用和式等效积分可得到离散的PI表达式:
U(k)=KpE(k)+Ki∑E(k)
(2)
式中:k为采样序号;U(k)为第k次采样的输出值;E(k)为第k次采样的偏差值。写成z传递函数形式为
(3)
式中:G(z)为Z传递函数;U(z)为输出值;E(z)为系统偏差;Kp为比例控制环节系数;Ki为控制器的放大增益系数。其控制结构如图3所示。

图3离散式PI控制结构
2 电调阀应用现状
在实际应用中,电调阀安装如图4所示。通过不断改进、优化,基于常规PI控制的电调阀基本满足级联运行要求,在系统正常运行时调节响应快,有较好的稳态控制精度。然而在系统压力出现较大扰动时,电调阀实际开度滞后于设定值,压力控制值与实际值偏差较大,不能达到理想的控制效果。

图4电调阀安装示意
在常规PI控制中,电调阀的调节响应速度和调节精度取决于PI控制参数,而参数的设置与系统特定工况下的线性化模型和稳态工作点有关。在系统工况改变或存在较大压力扰动时,系统稳态发生改变,原有的PI控制参数不再是最优的控制参数,会使其调节响应滞后,如图5所示。
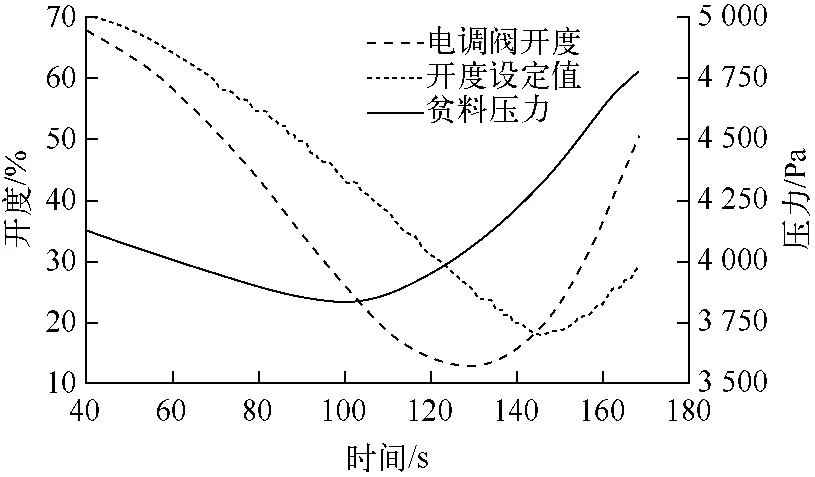
图5电调阀控制响应
调节过程中电调阀实际开度的过调较大,降低了压力控制的性能。因此,需要对电调阀的控制方式进一步优化,使其控制参数能根据不同工况和压力扰动进行适当自整定,以提高其压力控制性能。
3 电调阀控制优化
3.1 模糊控制[3]
随着控制理论的迅速发展,产生了模糊控制、自适应控制等高级的控制策略[4],并在复杂的非线性时变工业系统中广泛应用。在电调阀控制中,采用这些先进的控制策略设计能够进行控制参数在线整定的控制器,以提升电调阀控制性能。与常规的PI控制相比,模糊控制能将操作人员对控制设备的操作经验,进行基于语言变量的解释描述,建立与之相应的模糊控制规则;并通过计算机手段,将这些规则用于系统控制。由于模糊规则的建立不依赖系统数学模型,因此对于数学模型未知的、复杂的控制系统,有很好的控制效果。
模糊控制技术是将逻辑性的控制规律,通过模糊语言变量和模糊命令语句,转化为计算机控制命令的控制技术。模糊控制的实现主要包括模糊化过程、建立模糊规则库、模糊推理过程以及解模糊过程。模糊化过程的主要作用是将选定的输入信号转化为系统可识别的模糊量,并作为模糊控制器的输入量;建立模糊规则库是设计模糊控制系统的中心环节,依靠模糊语言对系统输入输出关系进行描述,建立包含实际控制经验的模糊控制规则;模糊推理过程是按照模糊控制规则进行模糊推理,得出模糊决策量;解模糊过程主要是将推理得到模糊决策量转化为清晰量,最终作为控制器的输出。
在实际级联运行中,操作人员通过观察压力传感器输出,根据经验对系统的压力及其变化情况进行分析,得出相应的判断。当压力出现较大波动时,有经验的操作人员可直接手动控制电调阀的开度,减小压力波动影响,从而实现较好的压力控制。依照模糊控制理论,操作人员的控制操作是在对系统运行特点理解后,在大脑中形成一定的控制逻辑,如“压力升高较快,需要增加电调阀开度”等,这就是模糊条件语句;再对系统的实时输入状态进行观察和判断,如“压力接近,正在逐渐恢复至控制值,暂时先不调整电调阀开度”,这就是模糊控制。
由于模糊控制的稳态精度较低,将它与常规PI控制相结合,利用常规PI在系统稳态时精度高的优点,构成模糊-PI复合控制方式。控制过程中对系统偏差和变化情况进行判断,根据设定的模糊规则,对PI控制的控制参数进行在线整定。这种控制方式类似于自整定PI控制方式,由于可以根据被控对象的情况进行参数整定,系统应对扰动的性能增强,从而可以达到预期的控制效果。
3.2 模糊-PI控制器设计[5]
3.2.1模糊-PI控制器的组成
模糊-PI控制器的基本设计思路是通过对电调阀的输入和输出偏差e和偏差变化率ec进行模糊集合论域上的描述,并与PI控制器参数的变化量△Ki、△Kp之间建立基于控制逻辑的模糊规则,通过模糊推理将模糊控制器输出值与原有PI参数叠加,从而改变原有的PI控制参数设定值[6]。模糊-PI控制器由一个常规PI控制器和一个模糊调节器复合而成,如图6所示。

图6模糊-PI控制器示意
3.2.2模糊-PI控制器设计
通常情况下,根据系统e和ec的变化情况,对参数PI控制器的Kp、Ki的整定方法有[7]:1)当e、ec值处于较高的水平时,为了保证控制系统有良好的动态控制特性,Kp的取值通常应设定得较高,因为大的比例控制下,系统的超调量会增加,通过减弱此时的积分作用,可以抑制超调,通常的做法是将积分系数设为0;2)当e、ec值处于中等水平时,为使系统既不产生较大超调,又能有较快的响应速度和控制精度,在这种情况下Ki和Kp的取值要大小适中,若Kp设置太小,系统响应速度较低,会增加控制的时间;3)当e、ec相对较小时,说明系统处于稳定状态,应当既保证响应速度,又保证稳态精度,避免小的输入变化对系统造成干扰,使系统压力保持相对稳定,此时可以同时加强比例和积分作用。
从以上规则出发,按照如下的方法进行模糊控制器的设计。
3.2.2.1输入、输出变量及模糊论域的确定
模糊-PI控制器为两输入两输出控制器,输入量是被控对象和设定值之差e和差的变化率ec,输出量是PI参数的变化量△Kp、△Ki。分别用7个描述语言值对输入及输出变量进行模糊论域上的划分。各语言值分别用符号FD、FZ、FX、O、ZX、ZZ、ZD表示,对应在模糊集合论域上的数值程度分别是负大、负中、负小、零、正小、正中、正大,即对各个变量按照大小程度在论域内进行划分,由不同程度的7个模糊子集构成整个论域[8]。为较全面的使模糊子集对论域进行定义,使用[-6,6]之间的所有整数作为论域上的节点。
3.2.2.2隶属度函数的确定
至今还没有完善的隶属度函数确立理论。由于三角形隶属度函数运算过程相对简单,当系统输入偏差变化时,能够快速响应[9]。三角形隶属度函数为
(4)
式中:x为输入值;a、b、c为结点。
按照式(4),将模糊论域按节点划分为相交的7个子集,包含了论域上所有的元素。
3.2.2.3模糊控制规则的建立
模糊控制规则是对操作人员控制逻辑的总结模拟。控制规则来源于操作员的控制经验,是对大脑思维的抽象表达。其核心思想就是根据输入偏差的变化情况,进行有针对性的调节。当输入的偏差较大变化较快时,加强对执行机构的控制力度;当输入的偏差较小时,减小控制力度。对人而言,改变控制力度的强弱是通过直接改变控制量的大小和调整周期实现的;对控制器而言,是通过设定相应的参数实现的,利用模糊集合理论将手动控制逻辑转化为一系列模糊推理计算,根据运算结果给电调阀PI控制器输出参数变量。
根据操作人员的实际工作经验,总结出了输入变量e、ec与输出变量PI参数△Ki、△Kp的关系,建立如表1、表2的控制规则表。
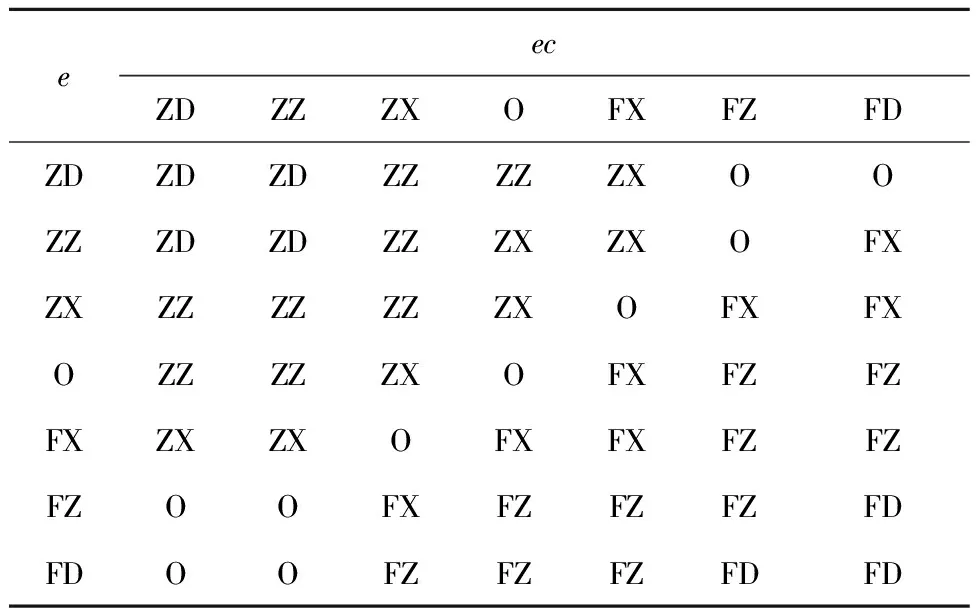
表1△Kp模糊控制规则

表2△Ki模糊控制规则
3.2.2.4模糊推理
模糊推理就是将输入的清晰变量通过转化模糊量和推理,求出相应的模糊决策;再将决策量转化为清晰量,交给控制执行机构的过程。MATLAB模糊控制工具箱提供了基于Mandain直接推理法的算法,可以对模糊控制进行仿真。
3.2.2.5模糊控制仿真[10]
在进行基于模糊PI控制的仿真前,首先利用MATLAB的Fuzzy Logic Designer工具,进行模糊控制器的设置。将压力偏差、偏差变化率设为输入,将PI的控制参数调整量△Ki、△Kp设为输出。在Rule Editor中建立模糊规则,所要建立的模糊控制规则,通过模糊条件语句进行表述。由于输入和输出的模糊子集数量均为7个,因此共需要49条模糊条件句对上述规则表进行表达。对编辑好的模糊控制器进行装载之后,就可以进行仿真运行试验。通过仿真系统,进行手动状态和自动状态控制下的阶跃响应和自动状态下存在扰动和信号干扰的动态试验,并与常规PI控制方式进行了对比分析。
手动控制方式下的阶跃响应对比仿真结果如图7所示。可以看出:在同等幅度的电调阀开度阶跃信号的驱动下,2种控制系统的阶跃响应曲线基本吻合,无明显突变。这说明2种控制方式都能很好地进行精确控制,均有较强的稳态性能。

图7手动方式下的阶跃响应仿真对比
自动方式下稳态压力阶跃响应的对比仿真结果如图8所示。可以看出:常规PI控制方式下,被控压力到达控制值的时间较长;通过模糊-PI控制,电调阀在控制压力时的超调减少,被控压力到达控制值的时间缩短;2种控制方式的稳态精度基本相同。

图8自动方式稳态下的阶跃响应仿真对比
流体扰动仿真对比结果如图9、图10所示。可以看出:在流体压力有较大波动时,常规PI控制的压力波动较大;而模糊-PI控制通过参数整定,使得压力在上升和下降过程中变化放缓,超调较小。在流体压力有较小波动时,模糊-PI控制与普通PI控制效果相当;由于存在干扰信号,2种控制方式在压力趋于稳定时,均存在小幅波动,常规PI控制方式的抗干扰性能略高于模糊-PI控制方式。

图9流体扰动下压力控制结果对比

图10流体扰动下电调阀开度变化对比
仿真测试结果表明,根据模糊控制理论设计的模糊-PI控制器,使得电调阀在应对系统压力扰动时,能够按照预先设计的模糊规则,对控制器PI参数进行整定,模糊-PI控制器在应对较大压力扰动时的控制性能优于常规PI控制方式,但稳态精度略显不足。这主要是因为系统偏差较小时,模糊控制规则失效而引起。因此,可设计采用常规PI和模糊-PI并联的自动控制方式,在系统处于稳态时使用常规PI控制方式,在压力波动较大情况下自动切换至模糊-PI控制方式。
4 结论
电调阀在铀浓缩工艺中的应用,改变了传统的压力控制方式,简化了系统设置,具有结构简单、稳态调节精准、控制简便等优势。但常规PI控制方式的电调阀在较大扰动状态下,调节性能还需优化。采用PID控制方式以及“模糊-PI”控制方式对电调阀的控制进行优化,可以提升电调阀的调节性能,提高系统的稳定性和安全性。