基于栅格分析策略的空中航路规划仿真
2019-01-20刘广才张竹欣家会臣杨志坚朱斯燕
刘广才 张竹欣 家会臣 杨志坚 朱斯燕


摘 要:该文提出一种基于栅格分析策略的空中航路规划方法,在充分考虑气象、地理环境、敌情对航路规划影响的基础上,对栅格数据做了一系列处理,剔除了应该规避的空域,降低了算法的搜索规模。仿真实验结果表明,不同的栅格分析策略可以加快航路规划速度,同时降低不合理航路的出现概率,使规划路径更接近最优。
关键词:栅格数据处理;栅格分析;航路规划
中图分类号:TP393 文献标志码:A
0 引言
我军装备在向信息化深入发展的同时,在智能化、无人化方面也展现出了蓬勃发展的势头,其中陆航、固定翼无人飞机、无人直升机发展尤为迅猛,这就给未来战场的空中机动航路规划提出了更高的要求。空中航路规划是陆航低空突防与侦察、无人机自主飞行的关键环节,借助计算机在复杂战场环境下进行空中航路规划,已备指挥员进行时间和资源的综合分析与计划制定,提高指挥决策效率。现阶段研究的重点大多放在对航路规划算法的设计和改造,但空中机动还需要考虑飞机机型、气象以及地理空间环境对航路规划的影响,那么就需要依据作战任务对地理空间环境数据进行处理和区域构建。该文针对地理空间环境数据使用不同维度的栅格分析策略进行处理,并对空中航路规划算法的影响进行仿真研究。
1 栅格数据分析
1.1 栅格数据模型
栅格数据结构又称网格结构,是以二维矩阵的形式表达空间地物或现象分布的数据组织方式,即像元阵列,每个像元(图1)都有给定的属性值来表示地理实体或地理现象,例如高程值、气象环境(风、能见度、降水、大雾、风沙、雷暴、气压、气温等)、敌防御范围、敌火力覆盖范围等。
1.2 栅格数据处理
在进行栅格数据的空间分析之前,往往需要对数据先进行一些处理,以满足进一步分析的要求。例如将现有的矢量数据转换为栅格数据,再对栅格数据进行空间分析来获取更多信息。常用的栅格数据处理包括矢栅转换、聚合、重分级、重采样等。
1.2.1 矢栅转换
由于矢量和栅格数据在地理信息系统应用中各有利弊,因此,有时需要将这2种数据结构进行相互转化,以便于分析和处理问题。
矢量转栅格和栅格转矢量的方法,则采用矢栅转换参数对象作为参数,将矢量数据集转换为栅格数据集。栅格转矢量又称矢量化,是将栅格单元中的空间信息转换为几何图形的过程。
栅格数据细化处理可以减少栅格数据中用于标识线状地物的单元格的数量,从而提高矢量化的速度和精度。例如一幅扫描的等高线图上可能使用5~6个单元格来显示一条等高线的宽度,细化处理后,等高线的宽度就只用一个单元格来显示了,如图2所示。
1.2.2 重分级
栅格重分级(图3)就是对源栅格数据的像元值进行重新分类和按照新的分类标准赋值,其结果是用新的值取代了栅格数据的原像元值。对于已知的栅格数据,有时为了便于看清趋势,找出像元值的规律,或者为了方便进一步的分析,重分级是很必要的。
1.2.3 重采样
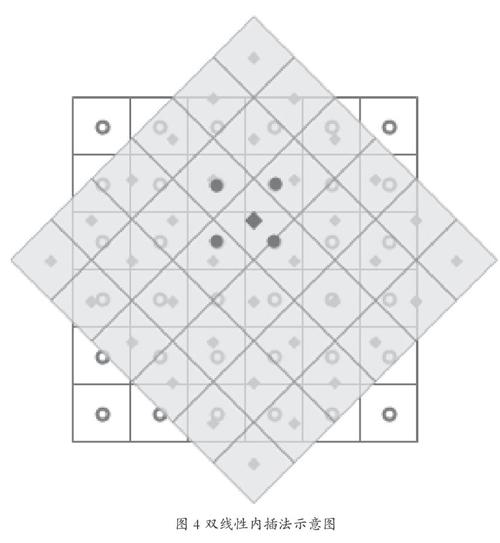
重采样使用的方法为双线性内插法,使用内插点在输入栅格中的4邻域进行加权平均来计算新栅格值,权值根据4邻域中每个格子中心距内插点的距离来决定,如图4所示。图5所示为栅格数据重采样结果。
1.3 栅格分析策略
该文提出3种栅格分析策略,分别为无栅格分析、气象栅格分析、全因素栅格分析,其中无栅格分析策略中将气象、地形等所有约束条件加入搜索过程中。气象栅格分析将气象约束条件加入栅格分析,其余约束条件加入搜索过程,全因素栅格分析将气象、地形等所有约束条件都加入栅格分析,搜索过程中不加入额外的约束条件。
2 基于栅格分析策略的空中航路规划算法仿真实验
2.1 仿真环境
仿真采用VC++6.0平台来实现。系统环境为Windows10系统。硬件环境为Intel Core i7-7700@3.60GHz。假定环境中采用旋翼无人机,最大飞行速度为75 m/s,转弯半径为0.09 km,最大仰角为30°。
2.2 仿真实验
构建栅格数据分析模型,设置高程、风等级、能见度等级、风沙、雷暴区域、气压值,敌方导弹火力覆盖范围、地方雷达阵地水平/垂直探测范围等参数值。
在进行无人机航路规划时采用3种策略分别为无栅格分析、气象栅格分析、全因素栅格分析,充分考虑无人机的性能约束条件,同时栅格的大小设置尽量匹配无人机的性能参数,避免影响飞机的空中机动。
设定最小栅格为100m×100m×52m的立方体,将航路规划区域用若干小立方体进行填充,完成建模。在三维环境中考虑雷达阵地和导弹阵地2个人为因素,进行仿真实验,对比算法性能。
表1中对比了3种航路规划策略在不同起点、目标点下的航路规划用时和航路距离。其中距离单位是栅格,航路67意义为航空器从起点至目标点需经过67个表格。时间单位是s。起点选择了栅格区域的左上角、右下角、中间3个位置。(1,1)为左上角起点,其目标点选择了栅格区域的其余3个顶点位置。(29,29)为右下角起点,其目标点选择了栅格区域的其余3个顶点位置。(14,14)为中间位置起点,其目标点选择了左上顶点、左下顶点、右侧边界点。
3种规划策略的仿真结果表明,栅格分析中加入的约束越多,航路越短、航路规划用时越短。说明了栅格分析在时间维度、最优路径维度都对航路规划有利。即在保证约束效果的前提下,既提高了航路规划效率,又可提高规划最优路径的概率。
3 结语
为提高传统航路规划算法的规划效率,该文提出了一种基于栅格分析策略的空中航路规划方法并对其进行了仿真。仿真结果表明,与无栅格分析的航路规划算法相比,全因素栅格分析在时间维度、最优路径维度都对航路规划有利,这说明栅格分析策略能够加快搜索用时、提高搜索效率。
参考文献
[1]辛正伟.航路網络规划技术研究[D].南京:南京航空航天大学,2013.
[2]王世锦,公言会,郦晴云.航路网络规划技术研究综述[J].交通信息与安全,2014,32(6):8-14,21.
[3]冯国强,赵晓林,高关根,等.基于A~*蚁群算法的无人机航路规划[J].飞行力学,2018,36(5):49-52,57.
[4]胡中华,赵敏,姚敏.基于栅格模型及双层规划的无人机三维协同轮流攻击航迹规划[J].中国电机工程学报,2011,31(36):162-167.
[5]王振华,章卫国,刘小雄,等.基于栅格空间V图的无人机路径规划[J].计算机测量与控制,2009,17(6):1212-1214.
[6]辛正伟.航路网络规划技术研究[D].南京:南京航空航天大学,2013.
