基于压力流量复合控制的水下非开挖钻进电液驱动系统研究
2019-01-14,,,
,,,
(大连海事大学 机械工程学院,辽宁 大连 116000)
引言
随着我国航运事业的不断发展,海洋资源勘探、开发、交通运输以及旅游等经济活动也在蓬勃发展,船舶进入大型化和专业化时代,但因此大吨位沉船事故出现几率增加,打捞难度也日益增加。尤其是在我国渤海和黄海地区,沉船不能得到及时快速的打捞,会导致“一船沉没,全港瘫痪”的局面,严重影响我国海洋经济的发展。
攻打千斤洞作业是沉船打捞的关键环节,整个过程是用攻泥器喷射头借高压水冲力,在船底泥沙中冲出一个孔洞,在难船船底穿引过底小钢丝并逐级穿引过底大钢丝,从而实现沉船的快速打捞。
近年来,上海、烟台等救捞系统联合科研单位基于陆地非开挖定向钻机系统设计了用于攻打千斤洞作业的设备。相比潜水员人工水下攻打,该设备降低了人工作业的劳动强度和危险系数,提高了作业效率和定位精度。但在“碧海行动”沉船打捞工程实施过程中,陆地非开挖定向钻机配合钻杆导向架攻打千斤的弊端也显而易见,表现为,导向架重量增加,结构强度降低,在海况恶劣的情况下极容易折断。
最先借用陆地非开挖钻机设备工作原理的是欧洲SMIT打捞公司与TERRA专业非开挖技术设备公司,他们研发出了第一台公认的水下导向攻泥器系统,设备的最大作业水深50 m,可以完成5万吨大型沉船的攻千斤作业,而且通过水面中央监控站可以对水下主机进行遥控操作,实现自动换杆、自动定位、自动钻进及回拖。
上海交通大学也基于陆地非开挖定向钻机研制开发了“深鳗I”,该设备在200 m水深下可实现最大100 m 的千斤洞攻打作业。通过遥控可完成定向钻孔,穿越沉船,再将牵引钢丝回拖,以达到穿引过底千斤的目的。
韩宇[1]采用变量泵和变量马达容积调速的设计方案,结合45 t水平定向钻机动力头控制技术要求,进行了负载、变量马达、变量泵和发动机之间的参数匹配;陈涛[2]确定了适于大吨位水平定向钻机的液压驱动方式,完成了280 t水平定向钻机的液压系统设计,在此基础上应用AMESim对动力头液压系统进行仿真分析,研究了负载变化对液压系统的影响;朱晓赟[3]对典型河相地层条件下非开挖导向钻进施工关键技术进行研究,借鉴土压力的计算模式,提出河相地层条件下管道回拖力的计算方法。
为了更好模拟钻杆在海底地质钻进推进力和回转阻力矩的大小,还要考虑钻压和转速对两者的影响。杨进等[4]开展喷射法下导管的模拟试验,建立了钻压与钻速之间关系模型,理论模型中最佳钻压和最大机械钻速数据与实测数据吻合良好;李娜[5]考虑影响钻进速度的因素有钻压、钻速、牙齿磨损、钻进液性能、水利因素等,解决水力破岩因素的钻速定量计算问题。
本研究探讨了一套基于陆地非开挖式钻进技术的液压系统,结合钻进过程中的负载要求,利用AMESim完成钻机动力头旋转回路与推进回路液压系统的建模与仿真分析。在推进回路液压系统液压马达两侧并联比例溢流阀,可实现动力头恒压控制,实现水下钻进和旋转的压力流量控制,保证负载突变或渐变时水下导向钻进的精准控制。整个钻机模块可有效对近海和内河沉船进行水下攻千斤作业,从而极大的提高打捞过程的整体快速性和高效性。
1 水下非开挖定向钻机模块的作业过程
水下非开挖钻机模块的作业过程以陆地非开挖技术为基础,钻机模块系统作业示意图如图1所示,利用动力头旋转和推进实现海底定向钻进,最终完成沉船过底千斤的穿引。大致过程如下:
(1) 调试设备 将钻机模块系统线路连接好,保持密封环境并安装在底座上,通过试运行和预调试保证系统正常工作;
(2) 布放 在作业母船上利用起重机将整个钻机模块放置船舷侧,由升降单元将钻机模块下放到海底,根据预设轨迹调整好钻机模块的位置、方向和入泥角度;
(3) 锚固 调整好钻机的高度,之后利用底座上的锚桩将整个模块固定在海床上,以防止海底暗潮涌动造成预设轨迹的错移;
(4) 钻进 操作员在集控室操作钻机,根据系统数据的实时反馈调整钻杆轨迹;
(5) 回拖 钻杆过船底出土后,潜水员或水下ROV机器人在沉船另一侧通过气泡寻找钻头,并连接回拖钢丝缆,或连接扩孔器用于扩孔。之后操作员在集控室操作钻机进行回拖工作,完成穿千斤的过程。
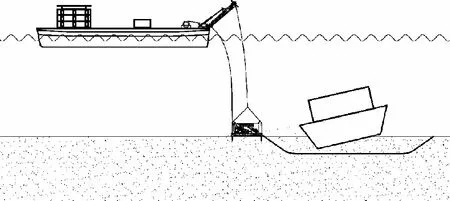
图1 水下非定向钻机模块系统作业示意图
2 水下非开挖定向钻进电液驱动系统
本研究提出一种非开挖钻进电液驱动系统,由动力头、钻架、自动换杆单元、钻杆、钻头及泥浆系统等部件组成。水下非开挖钻进液压系统为钻机模块提供动力,以执行机构为分析源头,所能实现的主要功能如下:
(1) 动力头的正、反向旋转 动力头旋转采用4个液压马达驱动,液压马达通过与中心齿轮啮合经过一级减速器减速后,实现钻机的扭矩输出。
(2) 动力头的推进、回拖 动力头推进采用2个液压马达驱动,钻架是动力头的行走机构,主要由钻架体、齿条、拖链等子部件组成。将马达的旋转运动转变为齿条的平移运动,且动力头前后在钻架上的行程满足拆装3 m钻杆的需要。
水下非开挖钻机钻进过程中,在不同的海底地质环境、不同的进给和旋转速度下,动力头输出的作用力是不同的。钻机模块的推进力和旋转速度能够适应海底地质需要,且能够根据钻进过程中需求对系统的压力流量进行复合控制。
采用比例溢流阀与液压马达并联,控制液压马达两腔压力,采用比例换向阀控制进入液压马达的流量。采用压力控制时,比例溢流阀设置为实现钻进的预压力,流量阀输出流量一部分进入马达,一部分进入溢流阀,通过溢流阀实现马达两腔压力控制,进而控制钻压。
采用流量控制时,比例溢流阀设置为安全压力,流量阀输出流量全部进入液压马达,实现液压马达流量控制,进而控制推进速度。
图2所示为水下非开挖定向钻机模块动力头回转液压系统原理示意图。对于动力头旋转液压系统,在钻进过程中,钻头所受到的正面压力通过溢流阀3调节控制。在三位四通换向阀5工作于中位时,两组变量马达串联,马达两端的恒定压差分别由与其并联的比例溢流阀来保证,且两组马达输出扭矩基本一致,提高了使用寿命;当调整输入信号,三位四通换向阀5工作于右位时,两组变量马达并联,此时可减小马达输出转矩。
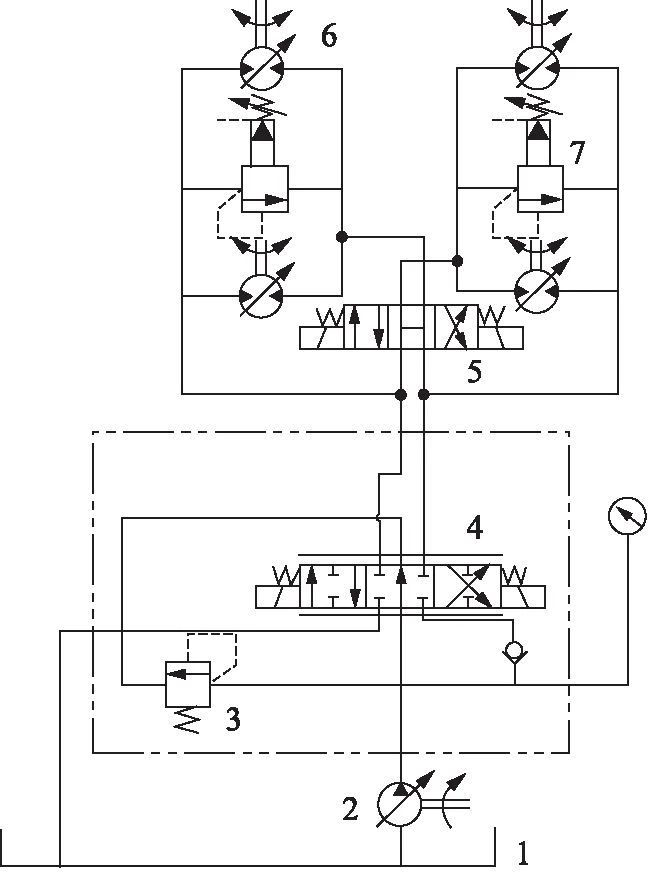
1.油箱 2.变量泵 3.溢流阀 4.三位六通比例换向阀 5.三位四通换向阀 6.变量马达组 7.比例溢流阀图2 动力头回转液压系统原理示意图
图3所示为水下非开挖定向钻机模块动力头推进液压系统原理示意图。进入马达的流量由三位六通比例换向阀4的输入电信号调节,马达两端的恒定压差同样由与其并联的比例溢流阀6来调定。
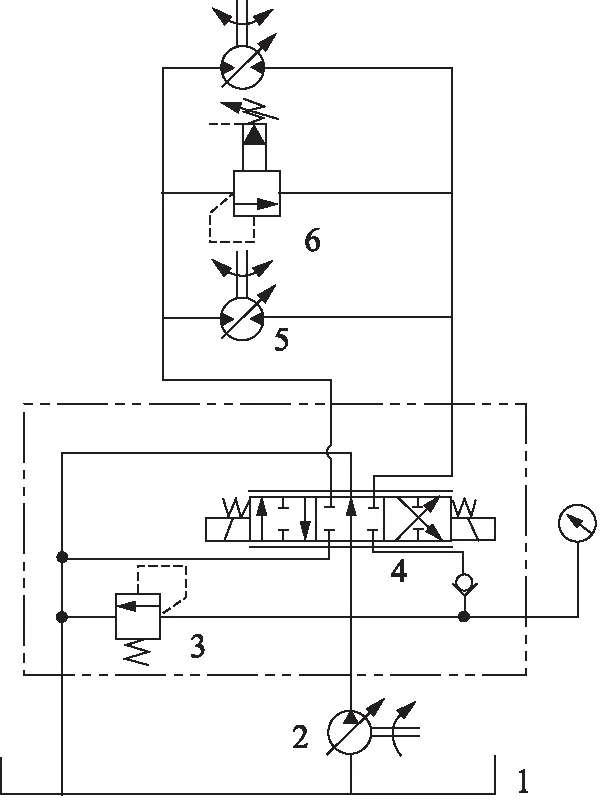
1.油箱 2.变量泵 3.溢流阀 4.三位六通比例换向阀 5.变量马达组 6.比例溢流阀图3 动力头推进液压系统原理示意图
3 非开挖定向钻进驱动系统的研究与建模
定向钻的基本工作原理为:钻头在运行过程中受到液压系统提供的静压力,当此压力下的推进力大于作用在钻头和钻杆表面的阻力时,就可以在海底挤压土壤完成攻打千斤洞。
3.1 定向钻的基本工作原理
为减小钻进过程中所受到的阻力,将钻头做成特定的形状,如图4所示,同时在钻头和钻杆上安装泥浆系统来疏松和固定土壤,由于定向钻钻头有一个非对称的斜面,使得钻头在直行或偏转时所受的合力是有区别的。
因此,当钻头斜面向上而钻杆只推进不旋转时,钻头通过施加顶推力而受到海底泥反作用力、作用在刀盘上的阻力以及摩擦阻力,将带动钻杆向下偏移;而当钻杆带动钻头高速旋转时,此时可视为垂直方向的力相互抵消,所以钻头将直线前进[6]。同时,在定向钻钻头内设有探棒室,装有斜面位置传感器和信号发射器,能够随时获得斜面的倾角和钻头的实际深度,便于进行定向钻进。
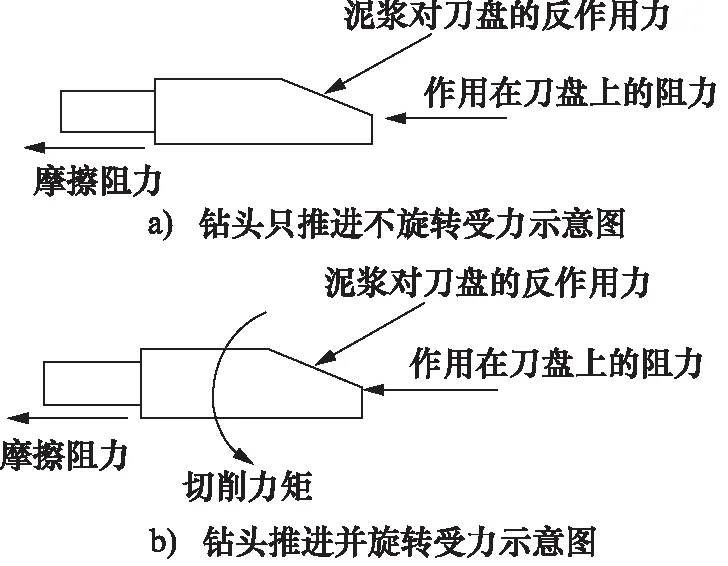
图4 定向钻轨迹改变原理示意图
3.2 定向钻头回转和推进机构的建模
回转系统马达输出轴联接包括减速器在内的元件以及动力头,动力头的回转速度可以通过输出轴和转动负载之间的角速度传感器测出,其元件参数如表1所示。
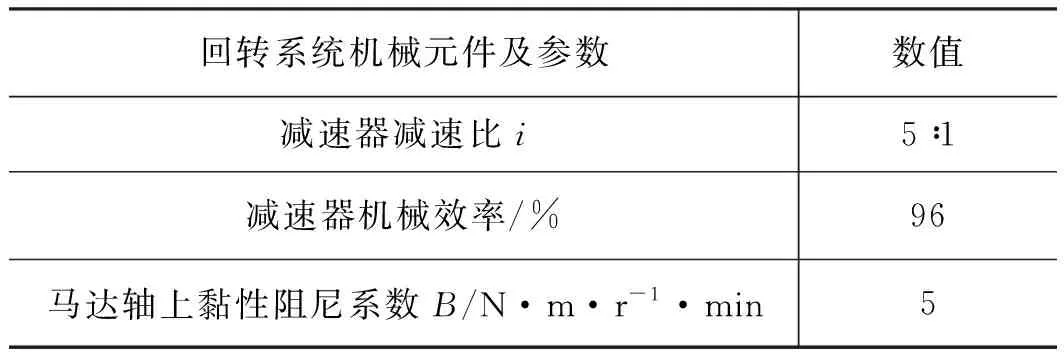
表1 回转系统机械元件及参数
推进系统马达输出轴联接的元件包括减速器、齿轮齿条和动力头。动力头的推进速度和推进位移分别由速度传感器和位移传感器测得,用于负载力的反馈计算,其元件参数如表2所示。
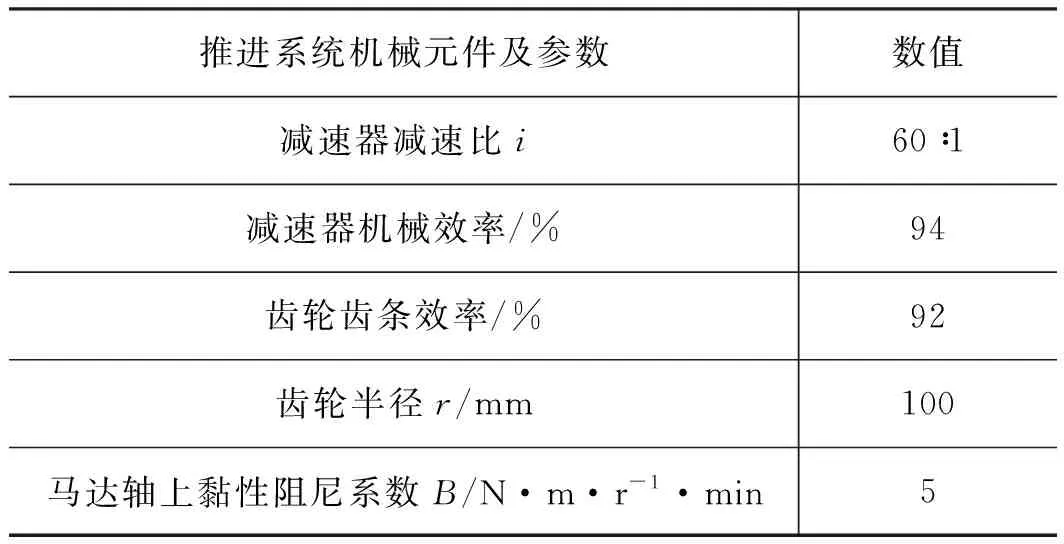
表2 推进系统机械元件及参数
用AMESim里对设计的水下非开挖钻进电液驱动系统进行仿真分析,如图5所示。
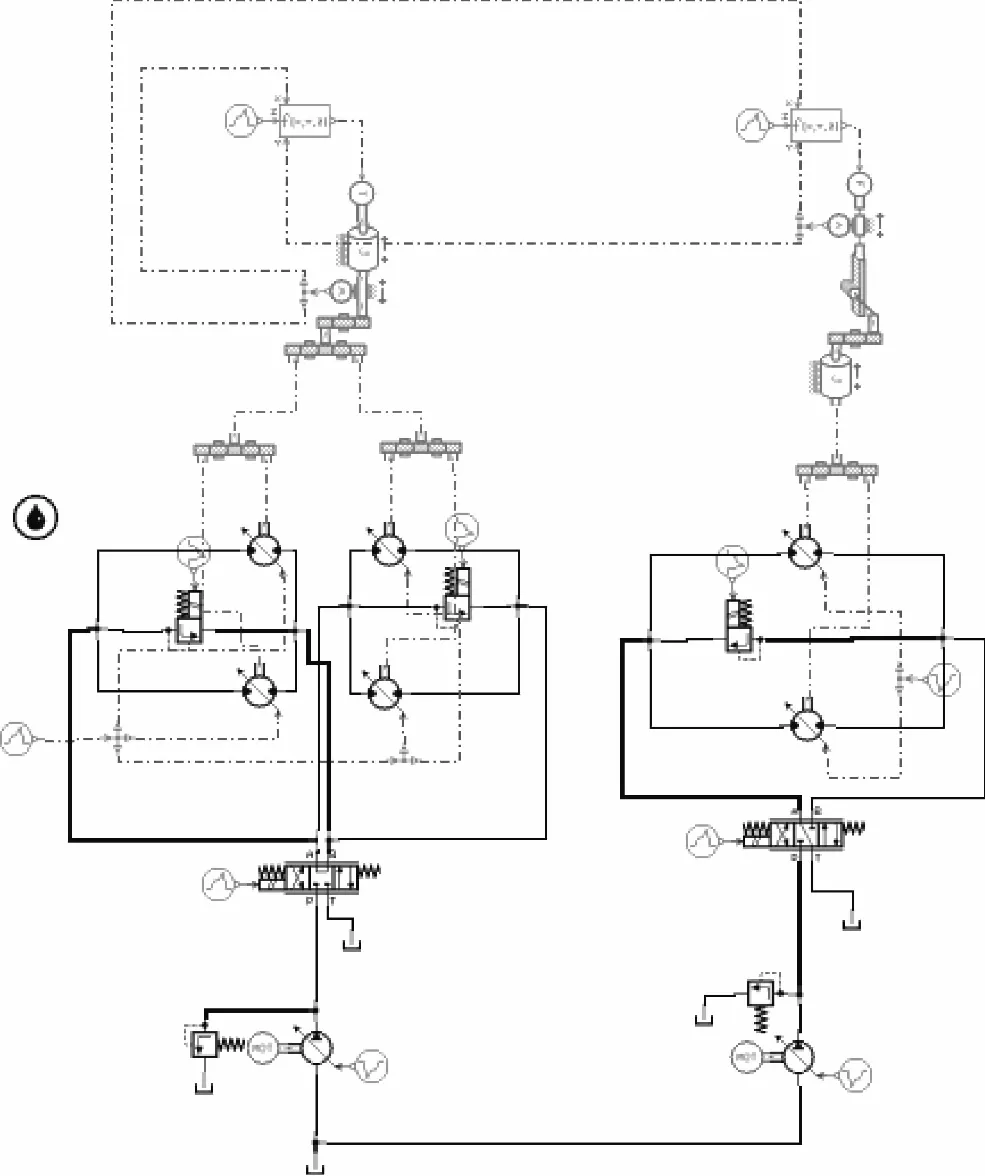
图5 钻机动力头电液驱动系统的建模
为了保证钻头在海底地质环境中准确的钻进,就要确定好导向孔轨迹与预设轨迹一致,其关键是动力头负载特性的计算[6]。
4 动力头负载特性的计算与分析
在不同地质条件下,动力头以不同钻压、转速作业时,所承受的推进阻力和阻力矩是有区别的,以下就其影响因素进行详细分析。
4.1 推进阻力的计算和分析
动力头的推进力用于破碎实际海底地质中的土层、砂层等,克服推进过程中的各种阻力,包括海底泥阻力、泥浆反作用力和钻杆所受到的摩擦力,即动力头在没有旋转切削的情况下破碎岩石的最小钻压。根据李邦达[7]的研究可知,在动力头提高钻压和快速旋转情况下,可以加快钻进速度。
1) 海底泥阻力的计算
采用静力学计算,海底泥对刀盘上的阻力为:
(1)
式中,F1——海底泥作用在刀盘上的阻力,kN
d1——刀盘的直径,m
p1——不同地质在钻进过程中单位面积上的压力,kN/m2
不同地质单位面积上的阻力如表3所示。
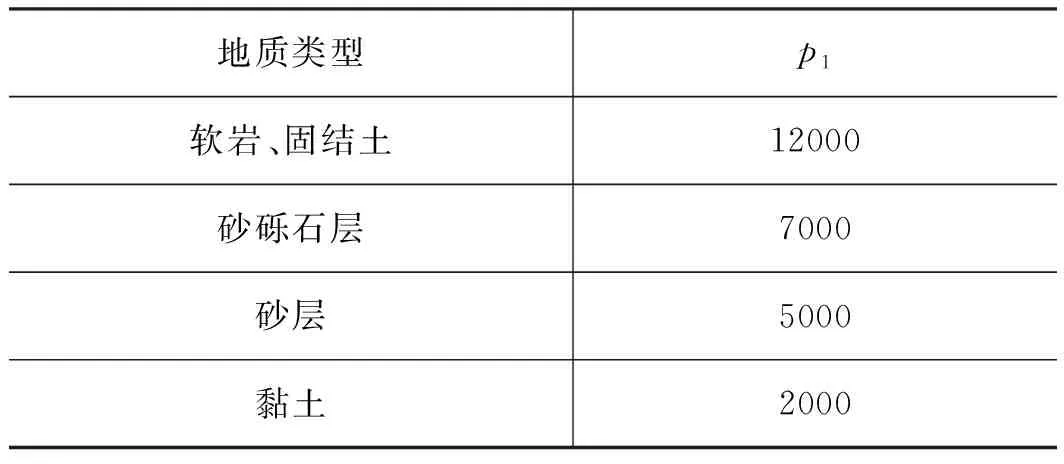
表3 不同地质单位面积上的阻力 kN/m2
泥浆系统通过输送海水使动力头散热,提高使用寿命;同时泥浆会在钻杆与洞壁之间形成护壁,防止出现“抱杆”现象,起到润滑作用。但在钻进过程中,泥浆会对钻头有一定的反推力,其压力一般为500 kN/m2。
2) 钻杆摩擦阻力的计算
动力头在推进过程中,随着钻杆长度的增加,钻杆与海底泥之间摩擦阻力不断增大。其计算公式为:
Ff=π·d2·L·f
(2)
式中,d2——钻杆直径,m
L——钻杆在海底钻进的长度,m
f——单位面积上的摩擦阻力,kN/m2
3) 钻压对推进阻力影响的计算
在海底钻进过程中,除了地质对动力头的推进力有影响以外,钻压和转速对钻速也会产生影响。钻压是钻头刚刚能破碎海底泥的负载力,其值大小可参考之前阻力的计算值之和。如果在钻进过程中施加的钻压很大,钻头切入过深,钻头扭矩就会过大,会造成转速下降,同时会缩短钻头的使用寿命。如果钻进过程中钻压过小,就会造成机械钻速太低,从而会使施工时间过长,影响工期。
钻压的大小在一定程度上决定钻头的切削深度,钻压和钻速存在一定的对应关系,即随着钻压逐渐增大,钻速也随之增加;但当钻压增大到一定程度后,机械钻速相反会呈下降趋势,采用二次函数形式进行回归拟合[4],其关系近似如下:
v=αW2+βW+γ
(3)
式中,v——钻速,m/s
W——钻头的钻压,N(实际工程中采用kN)
α,β,γ——回归系数
本研究主要研究钻压正相关于钻速时,液压系统各参数的变化,即在误差允许的范围内,可以视为与钻速成线性关系[4]。即:
vt=k·W+M
(4)
式中,M为钻速与钻压关系曲线在钻压轴上的截距,N(实际工程中采用kN)。
4) 转速对推进阻力影响的计算
对于转速而言,在海底地质复杂的工作环境中,有诸多因素影响转速与钻速的关系。根据李娜[5]研究,在实际钻井过程中,在井底净化充分的软底层,钻速与转速成正比;在硬地层及井底净化不充分的地层,钻速增大后钻速的增长变慢,是以指数关系变化的。考虑到海底地质一般在50 kPa以下,此处按照软底层计算和分析,其数学表达式近似为:
vt=k·vr
(5)
综合上述,钻压和转速对钻速的影响关系:在一定海底地质中,在不超过钻机动力头最大顶推力300 kN的情况下,钻杆处于常转速120 r/min,钻速大约为60 m/h;当钻杆转速适当增加时,钻速也有所提高,三者表达式为:
(6)
式中,vt——钻头钻进速度,m/s
vr——钻杆旋转速度,r/min
W——钻头的钻压,N(实际工程中采用kN)
4.2 回转阻力矩的计算和分析
动力头的回转扭矩是钻杆在海底钻进过程中,刀盘与钻杆一同做回转运动所需要的扭矩,需要克服刀盘的切削扭矩、钻杆与海底泥的摩擦阻力矩。
1) 刀盘切削扭矩的计算
刀盘的切削扭矩与海底地质有关,即钻头在旋转过程中,达到海底泥的抗剪强度,在切削过程中刀盘各处的抗剪强度一致,在切削面D上进行二重积分可计算回转阻力矩,计算公式为:
(7)
式中,T1——刀盘切削扭矩,kN·m
r——刀盘半径,m
τf——海底地质的抗剪强度,kN/m2
抗剪强度包括两部分,一部分是地质的黏聚力c(kN/m2),它是由于黏性土颗粒间的静电引力效应和胶合作用引起的(无黏性土可计算为0);另一部分与地质的内摩擦角成正比,它反映了土颗粒之间的摩擦阻力,一般来说,颗粒越小,内摩擦角也越小。
在钻进过程中,钻杆前进方向与船体对地质的压力方向近乎垂直,取压力作为滑动面上法向总应力,得到不同海底地质的抗剪强度如表4所示。
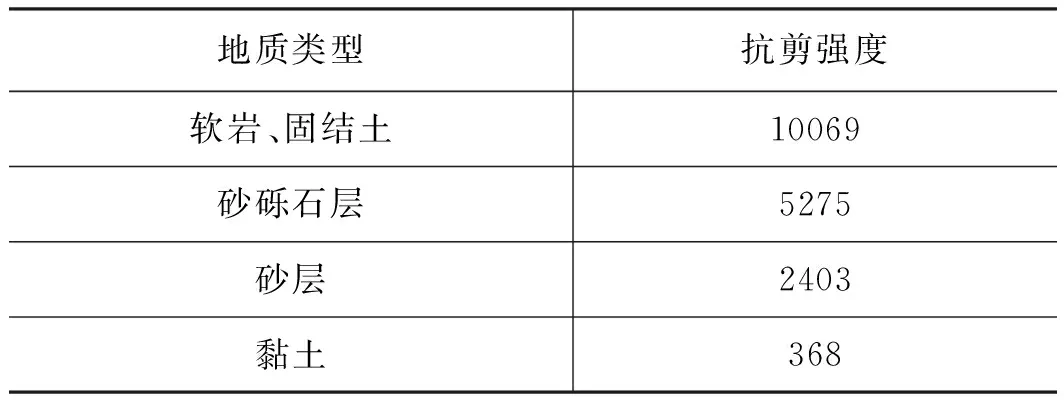
表4 不同地质的抗剪强度 kN/m2
将上表的数值代入式(7),求得刀盘在不同海底地质工作中的切削扭矩。
2) 钻杆与海底泥的摩擦阻力矩的计算
动力头在旋转过程中,随着钻杆长度的增加,钻杆与海底泥之间接触面积不断增大,对钻杆回转轴线进行一重积分,求得钻杆回转时的摩擦阻力矩,其计算公式为:

(8)
式中,r——钻杆半径,m
L——钻杆在海底钻进的长度,m
f——摩擦阻力,通常取值1 kN/m2
3) 钻压和转速对阻力矩影响的计算
与钻速类似,转速和钻压同样会对回转阻力矩产生影响。如果在钻进过程中钻压较大,或在承受载荷时转速过高,钻头进入深度也随之增大,钻头扭矩过大会发生断裂。如果钻进过程中钻压过小,或钻杆转速很低,就会造成机械钻速太低,切削量小,实际工况中出现钻而不动的现象。
为了更好地模拟海底地质中钻杆所受的回转阻力矩,在钻机动力头计算扭矩不大于12 kN·m的情况下,钻杆在正常转速120 r/min时,钻速大约为60 m/h;当钻杆钻压或转速适当降低时,钻杆的回转阻力矩也有所减小,三者表达式为:
(9)
式中,T——钻杆回转阻力矩,kN·m
vr——钻杆旋转速度,r/min
W——钻头的钻压,N(实际工程中采用kN)
5 仿真结果与分析
利用AMESim所设计的仿真模型,可以模拟钻头在海底地质下作业的负载状况,得到其作业速度,并找出负载变化对液压系统的影响。
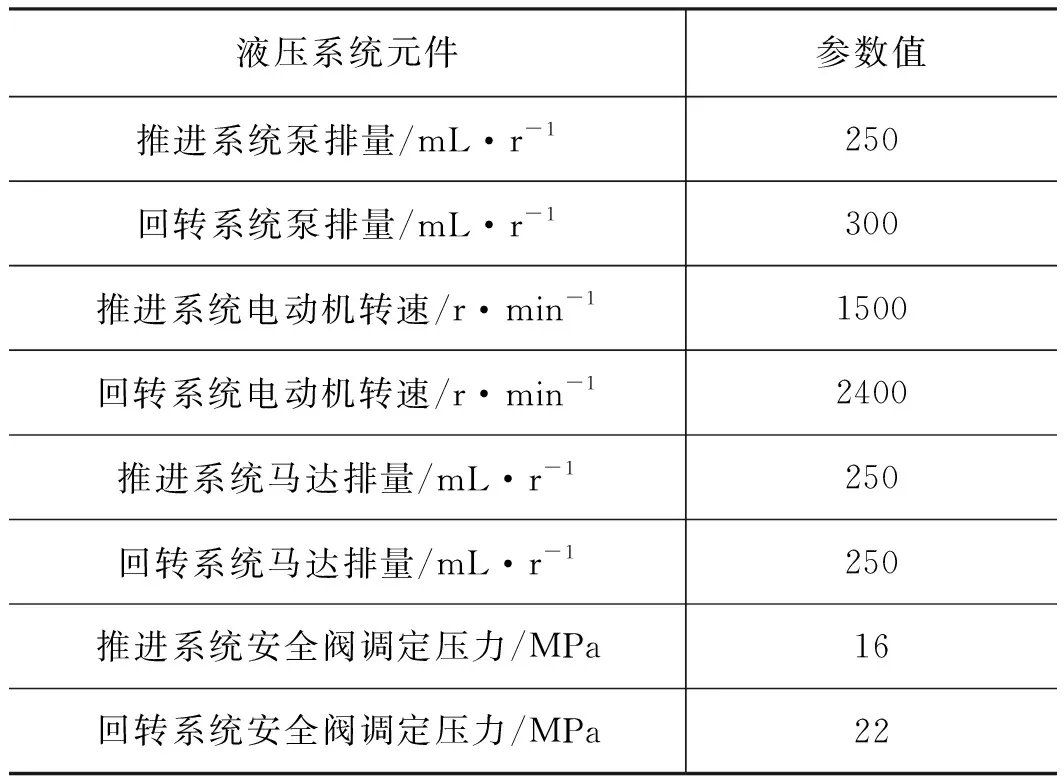
表5 液压系统仿真参数
5.1 单一地质中钻头仿真结果
1) 钻压对钻速及转矩的影响
对于单一地质,以软岩、固结石为例,假设钻机动力头的钻压或转速发生变化,液压系统的压力和流量也会相应做出调整,进而使钻速和回转阻力矩快速做出响应。
推进液压系统采用比例溢流阀压力控制,实现钻压调整。当动力头回转速度保持在115 r/min左右时,仿真时间10 s,钻压在5 s时由29.5 t变成18.4 t,其钻速和回转阻力矩变化如图6、图7所示。
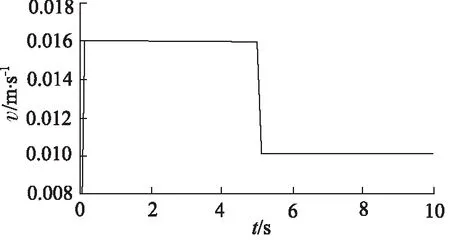
图6 钻压对动力头钻速的影响
动力头的推进力能够破碎海底泥向前钻进时,钻压会对动力头的运动速度产生影响。动力头钻速降低,由1.00 m/min降为0.61 m/min,切入深度减小,钻头回转阻力矩也从11.27 kN·m降为7.28 kN·m。所设计的液压系统能保持恒流量,使动力头回转速度基本保持不变,没有出现明显波动。
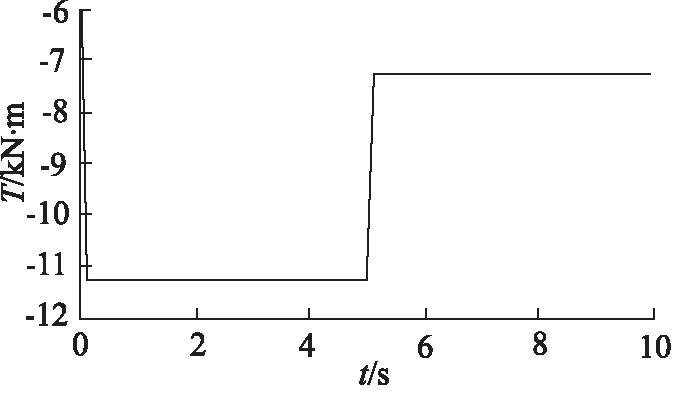
图7 钻压对动力头回转阻力矩的影响
2) 钻压控制性能仿真结果
当动力头回转速度降低时,钻头在海底地质中的钻进速度也随之降低,破碎量相对减小,所受的回转阻力矩也随之减小。如图8所示,在PID调定下,液压系统的钻压因比例溢流阀的压力调定而不发生变化。但动力头在实际地质下工作时,由于回转速度导致转动惯量和黏性阻尼发生变化,使得钻压有所上升,但远小于没有比例溢流阀调定时的变化量。即液压系统能靠比例溢流阀保持恒钻压,没有出现明显波动,符合设计要求。
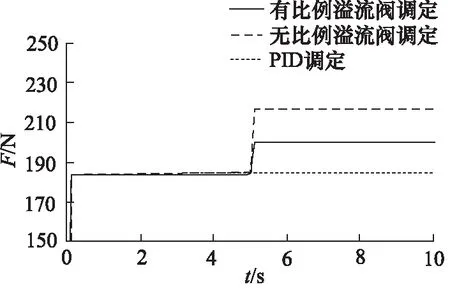
图8 不同条件下液压系统的钻压变化量
5.2 不同地质中钻头仿真结果
动力头在不同地质中钻进时,因地质条件发生改变,动力头所受负载也随之变化。
1) 地质改变对钻速及转矩影响
假设在AMESim中仿真10 s,钻机在第5 s从砂砾石层进入砂层,保持钻头恒转速钻进,其钻速和回转阻力矩变化如图9、图10所示。
钻机从砂砾石层进入砂层,即从较硬地质进入到较软地质,动力头所受负载减小,液压系统通过调定保证恒转速钻进。在PID调定下,钻头钻速迅速增大到1.00 m/min,回转阻力矩几乎不变;而在实际比例溢流阀调定下,钻头钻压降低,钻头切入深度增大,钻速由0.612 m/min提高为0.738 m/min,钻头回转阻力矩也从3.28 kN·m减小到2.64 kN·m;而无比例溢流阀调定的动力头钻速几乎不变,但转矩变化量减小约1.0 kN·m,液压系统的冲击力较大,液压元件寿命降低。
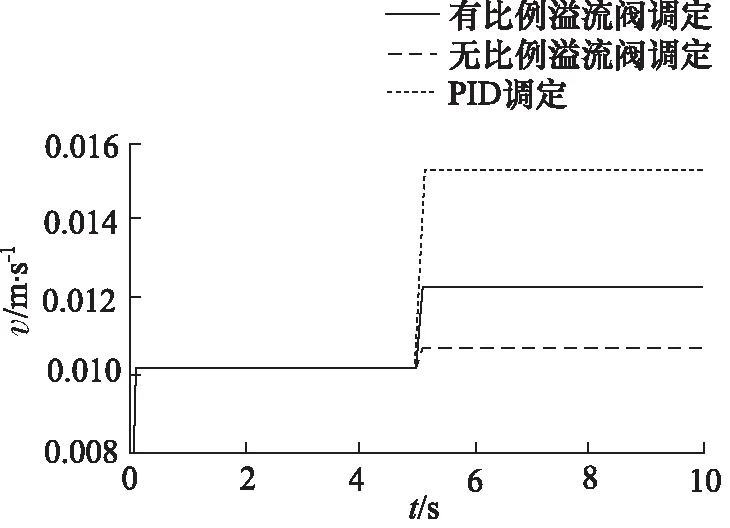
图9 负载突变时动力头钻速变化情况
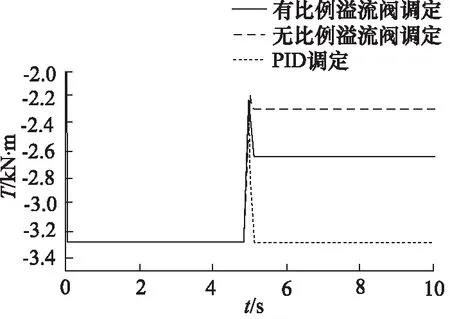
图10 负载突变时动力头回转阻力矩变化情况
2) 钻压控制性能仿真结果
为了更好地验证比例溢流阀的恒压作用,假设在第8 s回转速度由119 r/min降为96 r/min左右时,动力头钻压变化如图11所示。
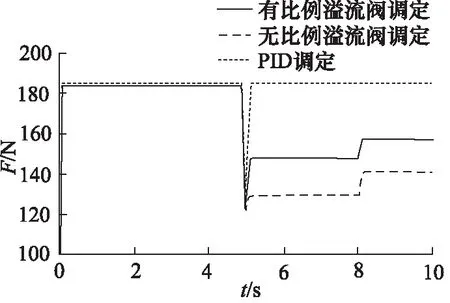
图11 动力头钻进过程中钻压变化情况
动力头负载在第5秒突然减小时,液压系统的钻压迅速降低,但在PID调定下很快调定到初始钻压,基本不发生变化;有比例溢流阀调定作用的液压系统钻压变化量相对较小,相比于无比例溢流阀调定的液压系统,元件所受冲击力小。
之后第8秒通过调节比例换向阀的阀口开度,使进入回转液压系统的流量减少,回转速度降低,有比例溢流阀调定作用的液压系统钻压升高,且相比于无比例溢流阀调定的液压系统,钻压变化量较小,液压冲击力小。
6 结论
(1) 动力头液压驱动系统是水下非开挖定向钻机电液驱动系统中的重要组成部分,将动力头回转系统和推进系统独立设计,二者之间互不影响,同时又在钻进时保持协同工作;
(2) 对动力头进行推进阻力和回转阻力矩的计算,求得水平定向钻机在固结土、砂砾石、沙土和黏土等不同地质条件下作业时的负载,同时考虑钻压和转速对其产生的影响;
(3) 利用AMESim仿真软件对动力头液压驱动系统进行了建模和仿真,通过比例溢流阀的恒压调定,得到负载变化对液压系统的影响。