基于有源RFID的非机动车逆行检测系统设计
2019-01-10杨登辉齐国强吕天剑
刘 凯,杨登辉,齐国强,吕天剑
(浙江海康科技有限公司,浙江 杭州 310012)
0 引言
非机动车如电动车,因其体积小、机动灵活,驾驶者在道路上行驶时,为了省事方便,常无视交通规则,不顾交通安全。如驾驶电动车逆行,一旦出现紧急情况,行人和电动车都难以及时躲避,事故率非常高。为了提高非机动车如电动车驾驶者的交通安全意识和降低非机动车因逆行或其他危险行为引起的人员伤亡及财产损失情况,交警采用多点部署、蹲点排查等方式对非机动车进行纠章,虽然有一定的效果,但大大增加了交警的劳动强度,耗费了大量的警力资源。本文提出了一种基于有源RFID的非机动车辆逆行检测系统,该系统是电动车防控射频网的应用扩展,可以有效发挥公安建设的有源射频RFID防控网的优势[1],能够提高交警部门对非机动车辆的智能化管理水平,降低交警劳动强度,节省警力资源,并填补非机动车辆逆行检测的空白。通过本系统也可以对非机动车违章驾驶者造成心理威慑,从而降低违章发生率,维护交通安全。
1 整体设计方案
本系统采用分布式计算的设计思想,车辆感知及逆行判断均由分布式基站完成,最终将结果发送至远程服务器,此种设计方式可以最大化利用基站资源并降低服务器大数据量处理的压力。系统由传感层、感知层、后台服务及WEB服务组成。
1.1 传感层
有源RFID作为物联网技术之一,通过无线方式识别特定目标信息而无需直接接触[2][3],特别适合在该方案中用于车辆身份标识的传感层。有源标签由电池供电,功耗极低,一颗2450纽扣电池即可保障正常工作3年,且发包周期短,具备最快100km/h时速下的快速抓取能力,完全可以胜任对非机动车辆的感知工作[4]。
1.2 感知层
由双天线有源RFID阅读器构成非机动车辆监控的感知层。采用1Mbps的空口通信速率加高性能处理器,使得有源阅读器多标签接入能力高达500张/s,可以满足任意场景的目标检测任务。
1.3 后台服务
主要用于设备维护及数据接入,将感知层回传的数据进行入库管理,供WEB服务分析使用。
1.4 WEB服务
主要提供人机交互界面,用于提供基于时间的数据筛选和违章信息的地理位置统计分布。整体框图如图1所示。

图1 WEB服务系统框图
2 硬件设计
2.1 有源标签设计
采用 NORDIC提供的 soc芯片nRF24LE1,其内部集成了增强型8051内核及nRF24L01+射频前端,只需增加极少的外围射频匹配电路等即可完成有源标签设计。
2.2 双天线有源阅读器
阅读器硬件主要由主控芯片GD32F450、两块射频前端芯片、4G模块、供电系统组成,其硬件结构框图如图2所示。

图2 硬件结构框图
其中射频前端芯片采用NORDIC提供的nRF51/52系列芯片,其特有的射频DMA处理机制为多标签处理性能提供了保障。
4G模组采用移远EC20模块,其内置TCP/IP协议栈,可以直接通过AT指令为有源阅读器提供访问服务器主机的4G网络接入能力,满足接入服务与阅读器之间数据交互的要求。
3 算法设计
阅读器包括读取有源RFID标签的两个定向天线,分别为定向天线A和定向天线B。两个定向天线分别朝向非机动车正向行驶方向和非机动车逆向行驶方向。逆行检测阅读器通过RSSI阈值划分检测区域,检测区域由进入检测区域和同侧检测区C组成。进入检测区域包括分别与两个定向天线同侧划分的两个进入检测区,分别为进入检测区A、进入检测区B,同侧检测区C位于两个进入检测区域A、B之间的位置,如图3所示。
系统对非机动车进行逆行检测的方法[5],包括如下步骤:
(1)逆行检测阅读器的定向天线A与电动车同侧正向行驶方向一致,定向天线B与电动车同侧正向行驶方向相反,由此确定了逆行检测阅读器同侧的逆行判断规则;
(2)设定进入检测RSSI阈值和同侧检测RSSI阈值,将空间划分为进入检测区A、同侧检测区C、进入检测区B二个区域;
(3)电动车I在1时刻所处位置为 I1,当逆行检测阅读器检测到电动车有源RFID信号强度值即RSSI超过进入检测RSSI阈值时,认为有效数据,并开始进行逆行分析,并将电动车首次出现时读取数据的定向天线A的区域认定为起始区域,即电动车I的起始区域为A。

图3 逆行检测算法原理示意图
(4)电动车 I在3时刻所处位置为I3,当逆行检测阅读器检测到电动车RSSI值低于进入检测RSSI阈值时,判断最后读取的定向天线B的区域为车辆行驶的终止方向,即图示电动车的终止区域为B。
(5)根据电动车I整个逆行分析过程是否出现RSSI值超过同侧检测RSSI阈值,判定该电动车是否在与逆行检测阅读器安装位置同侧的非机动车道上行驶,如图3所示,电动车I在2时刻所处位置I2进入了同侧检测区域C,即电动车I与逆行检测阅读器同侧;
(6)综合分析,逆行检测阅读器同侧正行方向为B→A,而电动车I的行驶轨迹为A→B,因此为逆行违章,即电动车I在与逆行检测阅读器同侧方向发生逆行违章。
同理分析电动车J(图3中左侧非机动车道):
(1)电动车J在1时刻所处位置为J1,当逆行检测阅读器检测到电动车有源RFID信号强度值即RSSI超过进入检测RSSI阈值时,认为有效数据,并开始进行逆行分析,并将电动车首次出现时读取数据的定向天线B的区域认定为起始区域,即电动车J的起始区域为B;
(2)电动车 J在2时刻所处位置为 J2,当逆行检测阅读器检测到电动车RSSI值低于进入检测RSSI阈值时,判断最后读取数据的定向天线A的区域为车辆行驶的终止方向,即图示电动车的终止区域为A;
(3)根据电动车J整个逆行分析过程未出现RSSI值超过同侧检测RSSI阈值,判定电动车在与逆行检测阅读器的异侧方向行驶;
(4)综合分析,逆行检测阅读器同侧正行方向为B→A,那么异侧正行方向为A→B,而电动车J的行驶轨迹为B→A,因此为逆行违章,即电动车J在与逆行检测阅读器异侧方向发生逆行违章。
(5)其他任意不符合该规则的车辆均认定为正向行驶。
逆行检测算法软件流程详见图4。
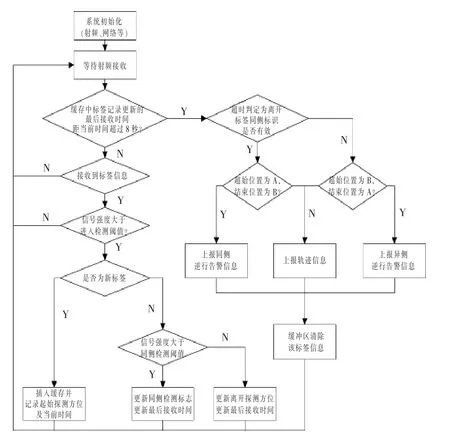
图4 逆行检测算法流程
4 系统运行测试
为验证系统的功能,在和睦医院门口安装一台逆行分析阅读器并在测试车辆中安装有源标签,通过在道路两侧分别逆行后,在后台分析服务器中查询纠章明细,系统成功检测到同侧和异侧逆行,结果如图5所示。

图5 系统测试结果查询
为验证系统准确率,在测试车辆中安装了5张测试标签,并沿设备测试点同侧及异侧进行逆行测试,共计行驶次数5圈,测试结果见表1。
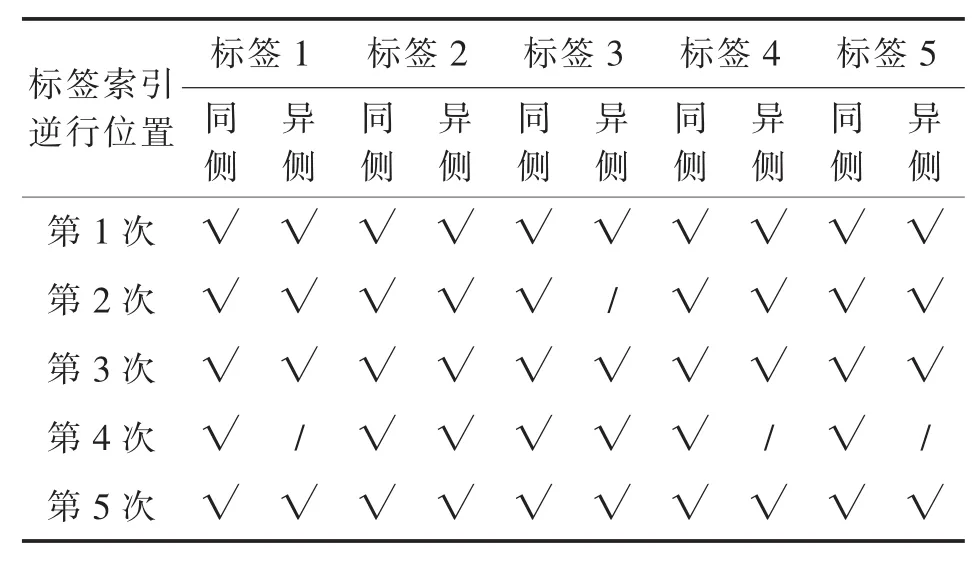
表1 逆行测试结果
注:“√”:表示有效数据;“/”:表示无效数据;“×”:表示错误数据;
从表1可以看出,同侧逆行检测准确率为100%;异侧逆行检测结果成功率为84%,判断不出顺行逆行的无效数据占16%,逆行检测成顺行的错误数据为0%。从数据上分析可知,异侧行驶车辆由于受到机动车辆等外在环境因素影响准确率比设备同侧略低,但已初步具有一定的实际意义。由于受测试环境影响及样本数量较少,准确率上存在一定误差,有待后续项目进行修正。
5 结 语
本文提出了基于有源RFID技术的非机动车逆行检测系统,重点讲解了逆行检测系统组成及算法实现原理并通过实际环境测试验证其有效性。该系统可以有效发挥公安建设的有源RFID射频防控网的优势,为有源电动车防控射频网提供横向应用扩展,有效提高交警部门对非机动车辆的智能化管理水平,优化警力资源配置,具有很好的社会价值及应用前景。
