双线偏振雷达标定技术应用
2019-01-07虞海峰
■ 虞海峰
随着双线偏振雷达技术的成熟和广泛应用,对双偏振量标定方法、精度和稳定性提出了更高的要求。使用双偏振标定技术可以全面检查雷达系统的状态,实时在线校正雷达系统偏差,提高双线偏振雷达数据质量。
随着双线偏振天气雷达技术不断成熟和部署,对雷达数据质量和数据稳定性提出了更高的要求。双线偏振雷达较传统的单偏振雷达新增的三个基本物理量分别为水平和垂直线极化幅度差异差分反射率(ZDR)、相位差异差分传播相移(φDP)和两通道相关系数(CC)。其中,ZDR和φDP准确和稳定测量是保证双线偏振雷达数据质量的重要前提。如何获取这两个基本物理量的系统偏差,以及标定并修正随时间带来的随机误差显得尤为重要。
双线偏振雷达标定的方法分为手动离线和自动在线两种方式,不同的标定方法发挥不同的作用。通过手动离线和自动在线标定相结合的方式,可以获取双线偏振雷达的系统偏差并校正随时间带来的误差。标定技术的应用可以提高双线偏振雷达的数据准确性和长期稳定性,为更好地发挥双线偏振雷达的定量降水测量和降水分类等技术特点提供了有效的方法。
1 标定方法
双线偏振雷达的标定方法分为手动离线标定和自动在线标定两种,手动离线标定需要雷达操作人员干预,并且需要在特定的天气条件下进行。自动在线标定不需要操作人员干预,在软件设定的时间自动标定双线偏振雷达幅度和相位一致性、噪声电平和反射率等参数。
1.1 手动离线标定
1.1.1 太阳法
太阳法标定是以太阳作为机外标定的噪声源,利用太阳可以辐射全频段微波能量的特性来检查天线的指向精度和两路接收通道的幅度偏差。图1为双线偏振雷达接收来自太阳的全极化射频能量示意图。
太阳法离线标定受时间和天气的影响,需要在晴天,且太阳高度角在一定范围时才能进行。
1)天线指向精度标定
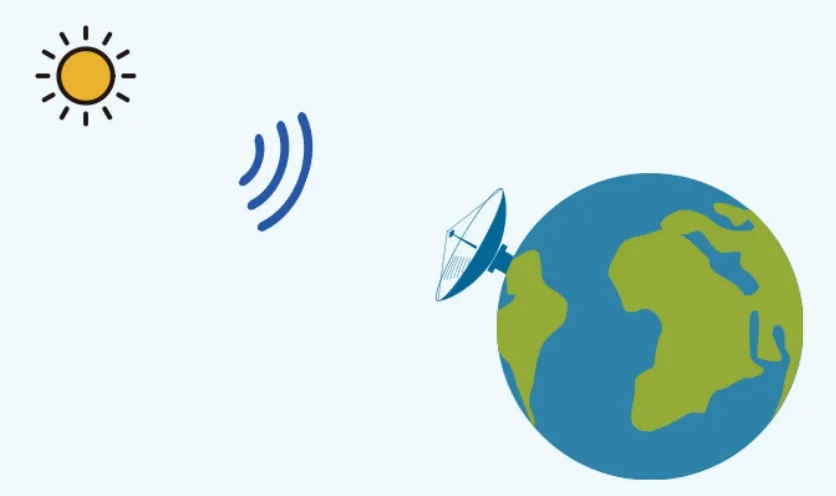
图1 太阳法离线标定示意图
太阳法可以用来检查和校正天线的指向精度,地球上任何地点都可以获得当地任意时刻太阳相对于本地的角度,通过将双线偏振雷达天线实际检测到的太阳中心位置和根据时间和经纬度计算的太阳理论位置相比较,得出雷达天线在方位和俯仰方向上的指向偏差。太阳法之所以能实现对天线指向精度的检查和校正,是因为随着天线指向位置和太阳所在实际位置的角度偏差会影响雷达接收到的太阳射频功率的幅度。双线偏振雷达以两个字节表示信号幅度,即幅度分辨率为0.01 dB;天线角码数据为14位,角度显示精度为0.022°。高精度的幅度和角度分辨率可以保证天线的指向精度标定。
为减少地面辐射等因素对天线指向精度检查结果带来的影响,通常太阳法检查时要求太阳的高度角在8°~50°,软件控制系统时间误差不大于1″,天线座的水平度不大于60″,天线的定位精度不大于0.1°,雷达站经纬度误差不大于1″。图2为太阳法标定结果软件界面,对话框内显示方位角度偏差为-0.05°,俯仰角度偏差为-0.07°,满足最大偏差≤0.2°的指标要求。
2)接收通道全链路标定

图2 太阳法检查结果
太阳作为一个外置的信号源,除了可以检查天线指向精度外还可以检查雷达系统两路接收通道幅度的一致性和收到的太阳功率的信噪比。使用双线偏振雷达标定软件进行太阳法检查,分析太阳法标定记录文件“Suncheck.txt”中的数据,可以读取水平通道H和垂直通道V所接收到的太阳功率值。图3中水平通道H获取的最大太阳功率在信号处理端读数为-67.8 dB,垂直通道V为-68.0 dB。两个通道幅度差值为0.2 dB,这个差值包含了天线罩损耗、天线增益、接收通道损耗、接收机增益等在内的所有接收链路的差异,反映了整个接收系统的系统偏差。多次离线太阳法检查所得到的两个通道幅度差异还可以反映出接收系统的稳定性。

图3 太阳法数据分析
1.1.2 动态范围
双线偏振雷达可以通过动态范围标定程序同时检查包括接收机前端、信号处理等在内的两个通道的动态范围及两个通道幅度和相位的一致性。动态特性的测量采用信号源(机内或者机外)产生的连续波测试信号,经过二路功分器后由接收机前端注入,在数据终端读取信号的输出数据,改变注入信号的功率,测量接收系统的输入输出特性。根据输入输出数据,采用最小二乘法进行拟合。由实测曲线与拟合直线对应点的输出数据差值≤1.0 dB来确定接收系统低端下拐点和高端上拐点,下拐点和上拐点所对应的输入信号功率值的差值为系统的动态范围。
动态范围标定还可以反映出两个接收通道在全动态范围内的幅度和相位的一致性,避免在不同信噪比条件下两个通道一致性存在较大波动。图4和图5为动态范围标定的曲线图,图4中水平通道(H)和垂直通道(V)在全动态范围内两个通道的幅度一致性很好,波动很小。图5中在低信噪比区域两个通道的幅度出现了较大的差异,这个差异会对不同强度降水的ZDR和φDP产品带来额外偏差,极大影响双线偏振雷达的数据质量,需要进行检修后再投入运行,也体现出动态范围定期离线标定的重要性。

图4 动态范围测试曲线1
1.1.3 发射和接收支路损耗检查
双线偏振雷达的反射率、差分反射率由两通道的接收支路损耗、发射支路损耗、天线增益和接收机增益等参数决定。发射支路损耗和接收支路损耗可以在系统安装后进行测量,测量结果输入到适配参数里,用于标定参数计算。图6为双线偏振雷达发射和接收支路损耗测量示意图。其中测量点P1到P3段为发射支路,测量点P3到P4段为接收支路。天线增益测量时选取测量点P3与测试仪表连接,P3为天线增益和发射/接收支路损耗测量的公共点。
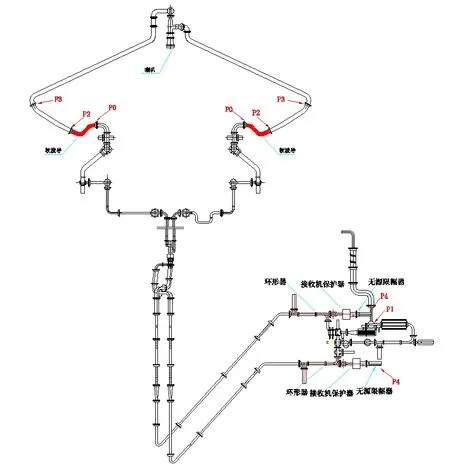
图6 发射和接收支路损耗示意图
1.1.4 天顶标定
双线偏振雷达在本站小雨、无风的天气环境下,将天线指向俯仰90°,此时降落雨滴的水平和垂直极化的分量近似相同,理论上雷达可以获取的ZDR值应为0 dB。标定后所得到的偏差即为ZDR系统偏差,标定后需要手动修改适配参数使得ZDR系统偏差为0 dB。天顶标定对降水条件要求较高,很难遇到合适的天气。图7为天顶标定的软件控制界面,包含质量控制参数设置、标定数据示意图和数据分析结果等信息。
开始天顶扫描之前要合理设置参数,合理的参数设置才能计算出系统的真实ZDR偏差值。图7中红色方框内为参数设置和数据存贮设置区域,蓝色方框内为数据分析区域,绿色方框内为数据结果区域。
天顶标定起始距离的选择要求大于雷达的盲区并满足天线的远场条件(天线波束形成)的最小距离要求。对于S波段新一代天气雷达盲区为1.0 km,天线波束形成距离为1.5 km,所以最终确定起始距离为1.5 km。结束距离的选取与雷达站点的海拔高度、经纬度和季节相关,所选的结束距离不能超过融化层高度,所有参数的设置和参数说明详见表1。

图7 天顶标定软件界面
图7数据分析区域中的 “反射率因子(R)”、“差分反射率(ZDR)”和“协相关系数(CC)”在垂直距离约4.7 km处发生了突变,这个突变的高度为融化层高度。所以结束距离设置为4.5 km(距离分辨率为0.25 km),没有超过融化层高度。径向速度和反射率因子的范围根据小雨无风天气特征进行设置。
天顶标定结束后,标定结果显示在图7所示绿色框内,第一组天顶标定结束的时间为2018年7月16日16:52:49,标定结果为-0.003 dB,有效的距离库数为2172个,满足设置的大于500个的要求。第二组天顶标定结束的时间为2018年7月16日16:53:05,标定结果为0.002 dB,有效的距离库数为14 473个,满足设置的大于500个的要求。两次标定结果均满足≤0.2 dB的指标要求。
1.2 自动在线标定
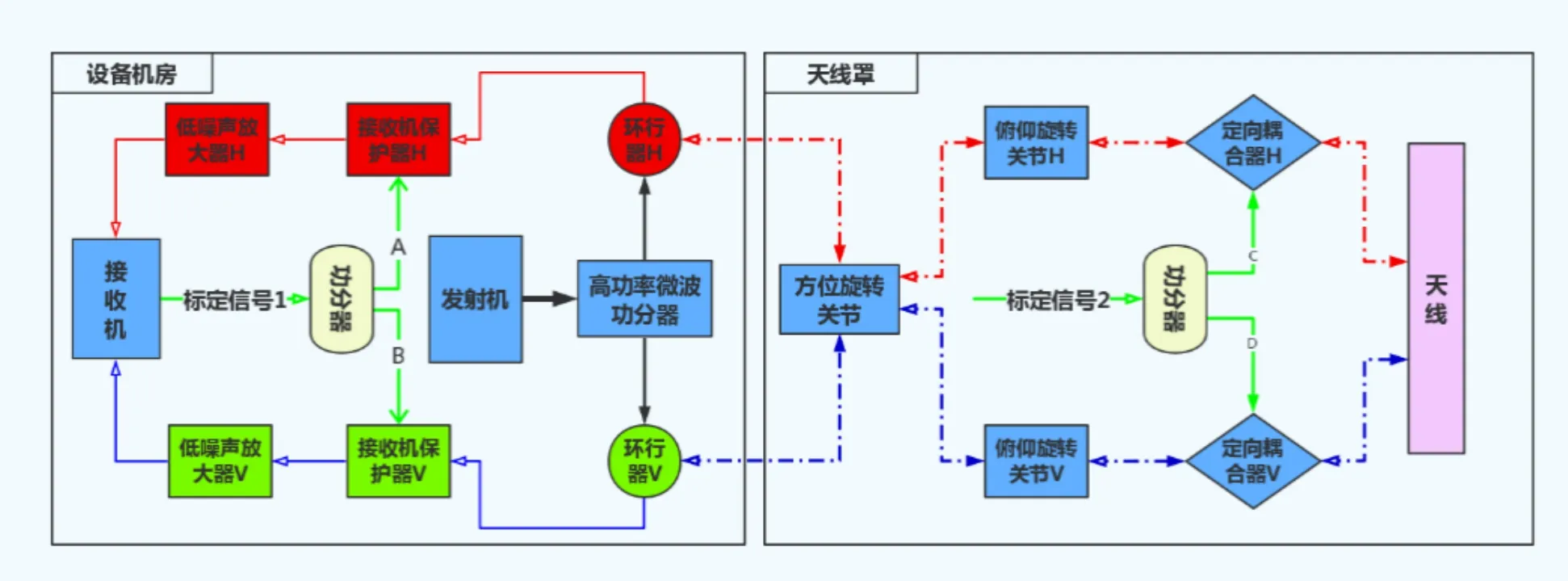
图8 自动在线标定连接示意图
自动在线标定按照标定信号源安装位置和注入点不同分为标定信号1和标定信号2,图8为自动在线标定连接示意图。标定信号1来自接收机内部四位开关的输出,先后经过功分器、接收机保护器、低噪声放大器后进入接收机,用来检查安装在设备机房内的接收通道状态。四位开关的输入分别为CW、RFD、NOISE和KD信号,分别代表连续波、射频脉冲激励、噪声和速调管输出延时信号。
标定信号2安装在天线反射体背面,输出的连续波信号经过功分器、定向耦合器、俯仰关节、方位旋转关节、环形器、接收机保护器、低噪声放大器后进入接收机,用来检查天线罩和设备机房在内的所有接收链路的状态。两路标定信号都经过机房内的接收机保护器、低噪声放大器后进入接收机。
自动在线标定包含机房内两路接收通道的幅度和相位一致性、接收机噪声温度和噪声电平、全链路接收通道的幅度和相位一致性及反射率标定等。
1.2.1 机房内两路接收通道幅度一致性标定
差分反射率受发射支路损耗、天线增益、接收支路损耗、接收通道增益和信号处理器等几个因素影响,其中仅接收通道增益就包含多个有源放大器等敏感器件,容易受到环境温度和老化等因素影响,其余部分均为稳定性更高的无源器件。用标定信号1中的CW信号对接收通道进行自动在线标定,检查两路接收通道的幅度和一致性。为了与系统差分反射率ZDR进行区分,将标定结果记为CWZDR,表示用连续波测试信号检查两路接收通道的幅度差值,这个差值包含了水平H和垂直V两路接收机保护器的耦合比差异和两路接收通道增益差异总和。
图9为CWZDR连续24 h标定结果变化曲线,横坐标为时间,纵坐标为标定结果,图中最大变化范围0.03 dB(0.25~0.28 dB),即接收通道增益差值变化了0.03 dB。

图9 CW ZDR标定结果24 h变化曲线
1.2.2 机房内两路接收通道相位一致性标定
与接收机幅度标定原理相同,可以使用标定信号1自动在线检查两个通道的相位一致性,标定结果记为CWPHIDP,表示连续波测试信号检查两路接收通道的相位差值。图10为连续24 h标定结果变化曲线,横坐标为时间,纵坐标为标定结果,最大变化范围0.34°(186.06°~186.40°),即两个通道的相位差值变化了0.34°。
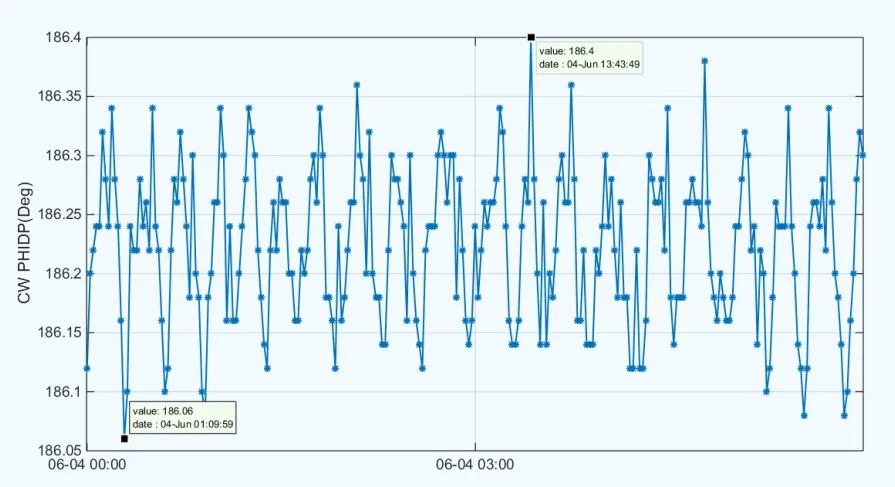
图10 CW PHIDP标定24 h变化曲线
1.2.3 全链路两路接收通道幅度一致性标定
双通道幅度的一致性影响因素还包括天线罩内的波导和旋转关节等馈线部分,标定信号2从俯仰关节之上的定向耦合器注入接收通道,可以在线检查天线罩和设备机房内的两路接收链路的幅度一致性。标定信号2在每两个360°扫描间隔进行,标定结果记为TSZDR,表示测试信号检查两路接收通道的幅度差值。雷达在切换俯仰角度时刻进行标定,标定结果记为天线在方位角和俯仰角位置时两个通道幅度一致性。多次标定后数据将覆盖所有方位角度和俯仰角度得到整个体积扫描内两个通道幅度一致性变化曲线。图11为连续48 h标定结果,数据按照方位角度从0°~360°进行排列。图中标识显示在方位角为58.62°、俯仰角为9.58°时标定结果最小值为-0.01 dB;在方位角为172.18°、俯仰角为0.48°时标定结果最大值为0.03 dB,最大变化范围为0.04 dB(-0.01~0.03 dB),标准差为0.01 dB。

图11 TS ZDR标定48 h变化曲线
1.2.4 全链路两路接收通道相位一致性标定
标定信号2可以在线检查两个通道的相位一致性,标定结果记为TSPHIDP。图12为连续48 h标定结果,数据按照方位角度从0°~360°进行排列。图中标识显示在方位角为351.12°、俯仰角为0.79°时标定结果最小值为218.22°;在方位角为199.12°、俯仰角为19.47°时标定结果最大值为219.64°,最大变化范围为1.42°(218.22°~219.64°),标准差为0.34°。

图12 TS PHIDP标定48 h变化曲线
1.2.5 机房内两路接收通道噪声电平/噪声温度标定
噪声电平可以检查接收机噪声状态,判断是否有外界干扰信号影响雷达数据质量;噪声温度可以反映系统的噪声系数。双线偏振雷达的噪声温度标定通过接收机内置的可以独立控制开/关的噪声源产生热噪声信号,即测试信号1中NOISE信号。测试信号同样经过二路功分器等器件后进入两路接收通道。
图13为噪声电平和噪声温度在线标定结果,水平通道H的噪声电平为-80.96 dB,垂直通道V的噪声电平为-80.90 dB;水平通道H的噪声温度为183T,垂直通道V的噪声温度为180T。按照式(1),可以计算出两个通道的噪声系数分别为1.63和1.62 dB。公式为

式中,NF为噪声系数,T为测量的噪声温度,T0为绝对温度290 K。
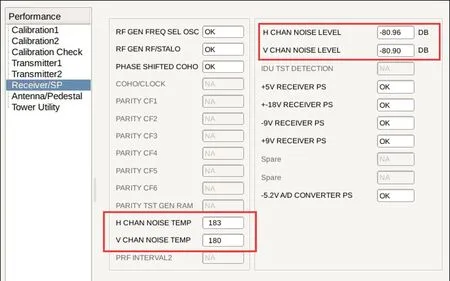
图13 噪声电平和噪声温度标定结果
1.2.6 机房内接收机反射率标定检查
根据雷达工作频率、天线增益、发射支路损耗、接收支路损耗、接收机增益等参数计算出反射率的校正参数,记为SYSCAL(System calibration)。SYSCAL的变化将体现接收机增益等性能参数的变化,并直接影响雷达反射率因子的计算结果。用标定测试信号1中的连续波信号CW和脉冲信号RFD来检查雷达系统的SYSCAL值,脉冲功率RFD的检查又分为高、中、低三组不同信噪比的信号,可以在线检查接收机动态范围内的线性度。每一组标定的期望值EXPECTED与测量值MEASURED之间的差值分别记为ΔCW、ΔRFD1、ΔRFD2和ΔRFD3。四组信号测量值与期望值之间的差值的平均值作为SYSCAL的变化,记为ΔSYSCAL。计算如下

这个变化后的SYSCAL′将用于下一个体积扫描中计算反射率因子。图14为自动在线检查结果,计算可得ΔSYSCAL=[0.0+(-0.1)+(-0.2)+0.0]/4=-0.075(dB)。应用于下一个体积扫描的SYSCAL′值相比本次扫描变化了-0.075 dB,即接收到同样幅度的信号时,反射率因子的值会减小0.075 dB。

图14 反射率标定检查结果
以上6个自动在线标定都在体积扫描开始前或扫描间隔进行。自动在线标定分别检查了接收机的幅度和相位一致性、噪声电平、噪声温度和反射率标定等对双线偏振雷达数据质量有直接影响的参数。有了自动在线标定使得雷达数据质量有了很好的保证。
2 实例应用
2.1 实例1

图15 CW ZDR标定变化曲线
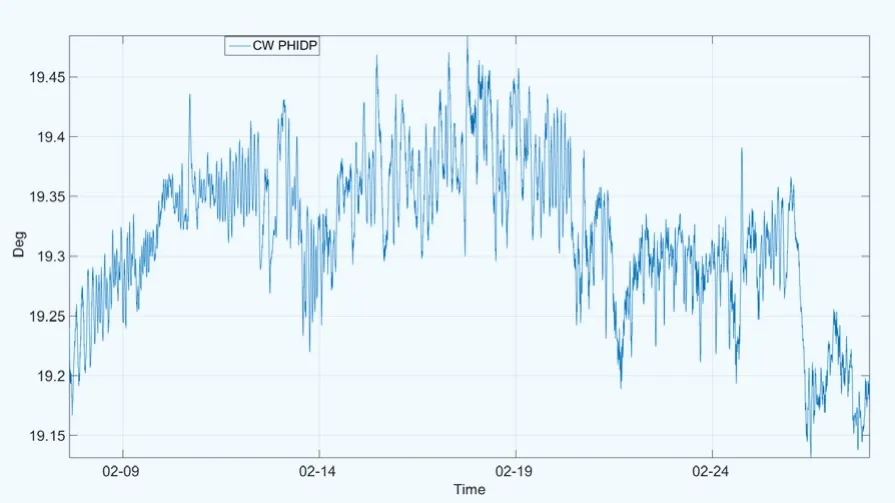
图16 CW PHIDP标定变化曲线

图17 标定正常时刻反射率因子产品图
图15所示为某雷达站2018年2月7—27日共计3个星期运行期间CWZDR标定结果的变化曲线,变化范围为0.01 dB(0.09~0.10 dB)。图16为CWPHIDP标定结果的变化曲线,变化范围为0.35°(19.13°~19.48°)。幅度和相位的标定结果分别满足双线偏振雷达幅度一致性≤0.2 dB和相位一致性≤3°的指标要求。图17~图20为2018年2月24日的雷达产品图,其中图17为反射率因子产品图,图18为ZDR产品图,图19为φDP产品图,图20为CC产品图。从产品图中可以看出ZDR和反射率因子的正确对照关系,反射率弱的回波区域对应的ZDR数值小,反射率强的回波区域对应的ZDR数值大,符合降水粒子的双偏振物理特性。在弱回波区域ZDR数值约为0.10~0.20 dB,说明没有明显系统偏差。φDP产品的相位变化幅度和趋势也与反射率因子能严格地对照起来,CC数值在降水区域也在0.97~1.00内,符合降水回波的双偏振特性。标定结果和雷达产品能够很好地吻合,在此次降水过程中双线偏振雷达的数据质量可靠,能够满足使用的要求。
2.2 实例2
图21所示为2018年6月8—13日运行期间CWZDR连续标定结果变化曲线。在6月9日CWZDR标定结果发生了变化,比正常值高约0.85 dB,超过了双线偏振雷达幅度一致性≤0.2 dB的指标要求。查看报警记录和报警期间双线偏振雷达反射率因子、差分反射率产品。报警记录显示“476 DIFFERENTIAL REFL CAL DEGRADED”,即系统差分参考值标定变坏。

图18 标定正常时刻差分反射率产品图
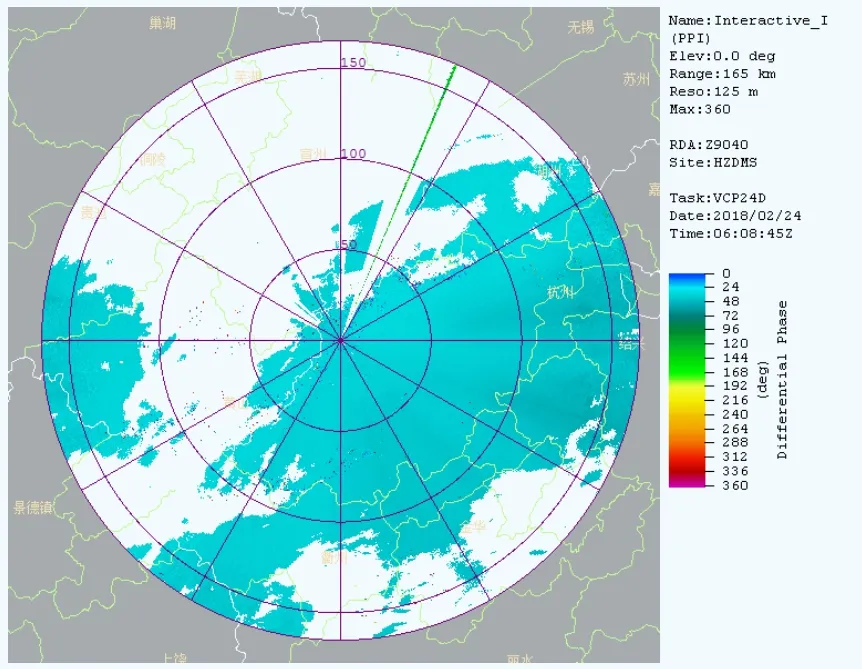
图19 标定正常时刻差分传播相移产品图
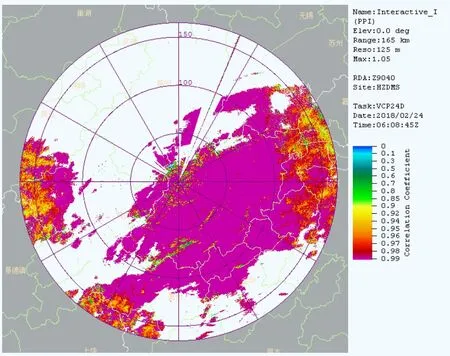
图20 标定正常时刻协相关系数产品图
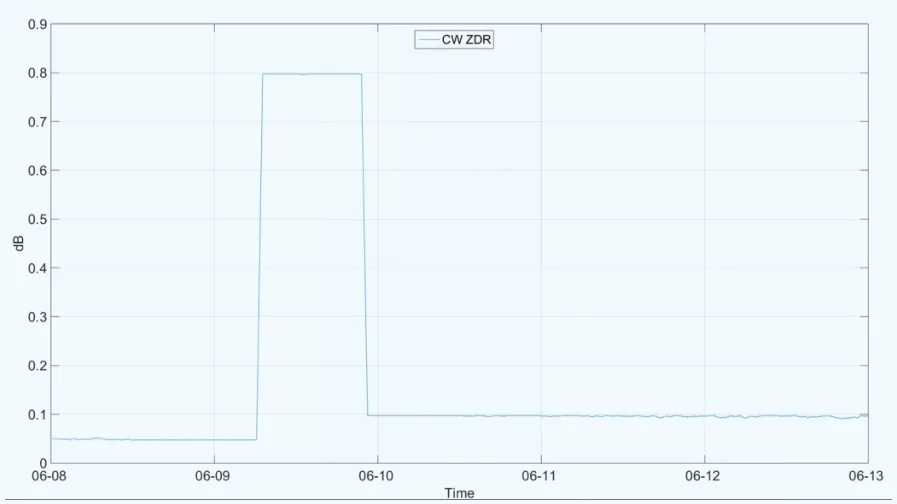
图21 CW ZDR标定变化曲线

图22 标定异常时刻反射率因子产品图

图23 标定异常时刻差分反射率产品图
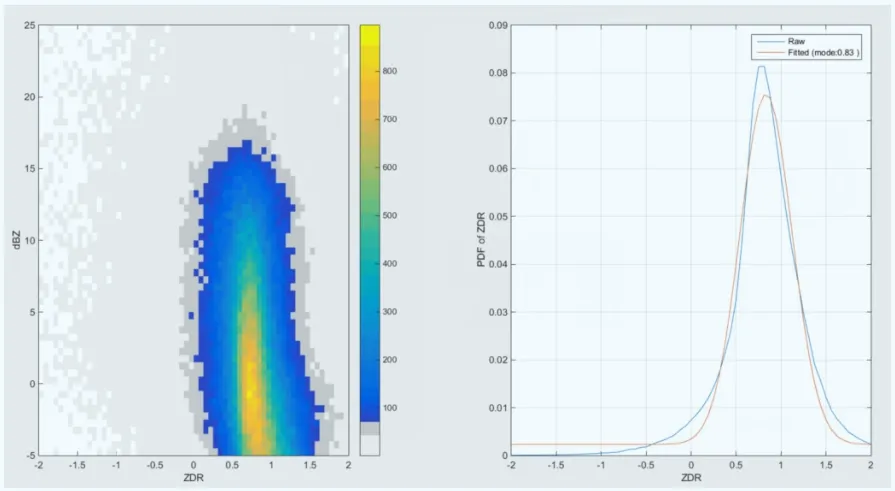
图24 系统ZDR偏差分析结果
图22为反射率因子产品图,与正常时刻产品对比没有发现明显异常,但图23中的ZDR产品图能看到明显的异常,在弱降水区域ZDR值远大于0.10~0.20 dB的典型范围,ZDR产品整体数值偏高。图24为使用基数据分析系统ZDR偏差图,分析结果显示雷达系统ZDR值偏高0.83 dB,与CWZDR标定结果显示的偏高0.85 dB吻合。
报警信息“476 DIFFERENTIAL REFL CAL DEGRADED”提示技术人员雷达系统出现故障,技术人员到现场后进行故障排查,最终更换了接收机垂直通道内的混频放大器后雷达恢复正常运行。检查雷达系统报警门限和自动修订参数设置,CWZDR维护报警门限为0.2 dB,变坏报警门限为0.5 dB。CWZDR标定结果与预设的参考值差异超过0.2 dB即产生“477 DIFFERENTIAL REFL CAL MAINT REQUIRED”报警,提示雷达需要进行维护,但ZDR系统偏差会自动在线修订,不会影响雷达产品。当标定结果与预设的参考值差异超过0.5 dB即产生“476 DIFFERENTIAL REFL CAL DEGRADED”报警时,提示雷达需要维修并且不再修正系统ZDR偏差。2018年6月9日故障时刻CWZDR标定结果与预设的参考值差异为0.85 dB,超过了预设的0.5 dB限值,所以产生了报警信息,提示技术人员雷达系统需要维修,不进行ZDR偏差在线修正。有了自动在线标定的记录、修正和报警功能,可以在一定范围内校正系统ZDR和φDP偏差,保证双线偏振雷达的数据质量。
2.3 实例3
图25所示为某雷达站2018年3月17—22日运行期间噪声电平标定结果变化曲线。在3月20日和21日噪声电平标定结果发生了较大的变化,远高于正常值。

图25 噪声电平标定结果变化曲线
图26为对应时刻的反射率因子产品,可以看到有大面积的干扰信号,严重影响雷达数据质量。噪声电平标定可以作为监控是否有外界同频干扰的一个在线检查方式,结合噪声电平报警时刻的反射率因子产品,可以有效判断是否存在同频干扰。

图26 有干扰的反射率因子图
2.4 实例4
标定信号可以检查雷达系统的幅度和相位的一致性,但也存在标定信号1或者标定信号2标定结果异常是因标定信号或标定通道本身出现问题的可能性。避免因标定信号和标定通道本身的故障导致误报警或者误修正,需要判断标定信号1和标定信号2两个标定通道的结果。在两个标定信号结果都存在异常且变化曲线和规律一致的情况下,基本可以判断是雷达系统本身的问题,并非标定信号的故障。图27为用标定信号1在线标定的CWZDR变化曲线,图28为用标定信号2在线标定的TSZDR变化曲线。在相同时间段两个标定结果均出现了异常,且变化趋势和规律一致,可以认为是雷达系统本身出现了故障。标定信号1和2的标定结果同时检测,避免因某一个标定信号本身的问题而误修正了主通道的参数影响雷达产品。

图27 CW ZDR标定结果变化曲线

图28 TS ZDR标定结果变化曲线
3 小结
双线偏振雷达对数据精度和稳定度有了更高的要求,标定技术的应用可以更全面和准确地反映雷达系统的状态。详细的标定记录和报警信息为故障提示、故障分析和故障解决提供了参考和依据。自动在线标定的修正功能提高了雷达系统的幅度和相位准确度及一致性,离线和自动在线标定技术的应用提高了双线偏振雷达的数据可靠性和准确性。
深入阅读
Choudhury S, Chandrasekar V, 2007. Wideband reception and processing for dual-polarization radars with dual transmitters.Journal of Atmospheric and Oceanic Technology, 24: 95-101.
Melnikov V, Zrnic D, 2015. Feasibility of monitoring ZDR calibration using ground clutter. NOAA/NSSL report.
Melnikov V, Zrnic D, Schmidt M, et al., 2013. ZDR calibration issues in the WSR-88Ds. NOAA/NSSL report.
