基于STM32的陆空两栖火灾智能探测车设计与实现
2019-01-06洪鹏翔袁宝红王依婷
洪鹏翔 袁宝红 王依婷
摘 要:随着城市的快速发展,越来越多的高楼大厦出现,难免会发生一些如火灾等意外情况或其他困难,有时候很有可能会因为不了解里面的状况而导致救援失误,造成被营救者受到伤害,甚至救援者也会有生命危险。为此,文章基于STM32的路空两栖智能探测车的原型进行设计,结合摄像机、GPS、红外等现代侦查探测必需的外部设备,在遇到高层建筑事故且常人无法进入的危险环境中,能够进行高效率的人员搜救。
关键词:高楼建筑;两栖救援;智能探测
近年来,我国经济逐步增长,人民日常生活水平大大提高,周围也出现各式各样的高楼大厦。高层建筑提升了土地面积和空间上的高效利用,同样也带来不少隐患,如当建筑物发生火灾时,其火势蔓延的较快,救援人员的扑救工作难度加大,为高层火灾的救火供水工作也增加了不少难度,用水量较多,相关救援人员难以到达受灾点,以至于不太了解发生火灾的具体情况、了解现场人员受伤情况和实时数据。由于火势过猛,救援人员无法进入受灾楼层,在发生火灾事故的时候,人们的第一希望是及时得到救援,但是有时面对高层建筑的火灾,由于不了解其内部的具体情况,救援人员不敢贸然进行抢救,导致错失了救援黄金时间[1-3]。
1 系统设计
利用无人机无可代替的空中优势,将航拍、生命探测、数据监测应用于高层建筑火灾环境下的抢险、救援,本文设计的智能探测车装有履带式运动轮,前轮与水平面呈45°角,具有很好的爬坡、跨越障碍物能力。母机遥控站人员可通过雷达等设备,应用生命探测仪技术对生命迹象进行跟踪、定位,确认受困人员相关的受伤信息和了解他们的生命状态。该路空两栖智能探测车的控制核心是基于STM32的总控系统,系统各个传感器的信号传送到STM32主控处理后使得系统能够及时、迅速地做出反应。
1.1 四轴飞行器控制理论
微小型的四旋翼飞行器在三维空间中可视为一个刚体,在空间中的运动含有6个自由度:飞行器质心在空间中的3个平移自由度和3个旋转自由度;四轴飞行器通过操控4个无刷电机的转速来达到不同的控制效果。为了保持控制飞行器的稳定,需要通过调节飞行器对角无刷电机同向、相邻无刷电机反向运动的方式来抵消飞行时的陀螺效应和空气动力扭矩效应。
1.2 GPS定位
本作品加入了GPS外设模块,型号为M8N,具有高性能、高灵敏度、低功耗较低、体积小等特点,极高的追踪灵敏度大大增加了其定位的覆盖面积,与市面上普通GPS相比,狭窄的都市天空下、密集的丛林环境等诸多地区,此型号的GPS都可以准确地定位到。本作品没有在飞控内部加入GPS而是采用了外设GPS模块的原因是:这样可以使信号反馈数据更稳定,从而使定位更准确。
1.3 视频图像处理
1.3.1 图像采样
在对图像进行采样后,首先,进行图像二值化,紧接着对图像进行分割处理,分成一个个的像素,一般的像素都有两个属性:位置和灰度。在进行采样和量化过后,利用计算机处理图像,并进行分析,最常用的分割方法是方形采样网格划分。将图像划分成一个个的水平线,它们是相邻像素,然后对其进行量化,将其用图像转为一个整数矩阵,再通过量化将图像数字化处理。
1.3.2 图像预处理
图像预处理是对图像进行的前期处理。大多数输入的图像一般不精确,检测对象的边缘比较模糊不清,可视的分辨度较低。检测对象形状不太准确,图像的边缘低于最低模糊的界限,图像在视觉效果和辨别性等方面可能存在着较多的问题,这类问题属于图像的质量问题,所以需要对采样的图像先进行预处理[4-6]。
1.3.3 图像增强
图像增强处理是为了对图像进行突出化处理,将所需要的具体细节显示出来,方便对图像进行算法识别。为了区别人体器官结构和高楼中其他物体图像的特征,去除或减弱无用的信息,并去除噪声,边缘强调的都是图像增强的相关内容。
1.3.4 图像识别
图像识别是通过对图像的主要特征进行具体分析后识别。每一个图像都会有自己独特的地方,比如字母S像一只倒立的蚯蚓,C有一个半圆,O是一个圆。图像识别中的眼动研究说明了视觉线路总是集中在图像主要特点上(包括图像的边缘和形状),图像轮廓的曲率最大或轮廓方向突变的地方以及图像中的信息量,E位是最大的。同样地,人体眼睛的扫描路径总是从一个特征点转换到另一个特征点上。
1.4 硬件设计
路空两栖火灾智能探测车由机架、履带车轮、高转速无刷电机、摄像头、红外人体检测仪、电调、图像识别系统、GPS定位等组成,探测车的机身材料均采用耐火、防高温的材料,以适应火灾等恶劣的环境。
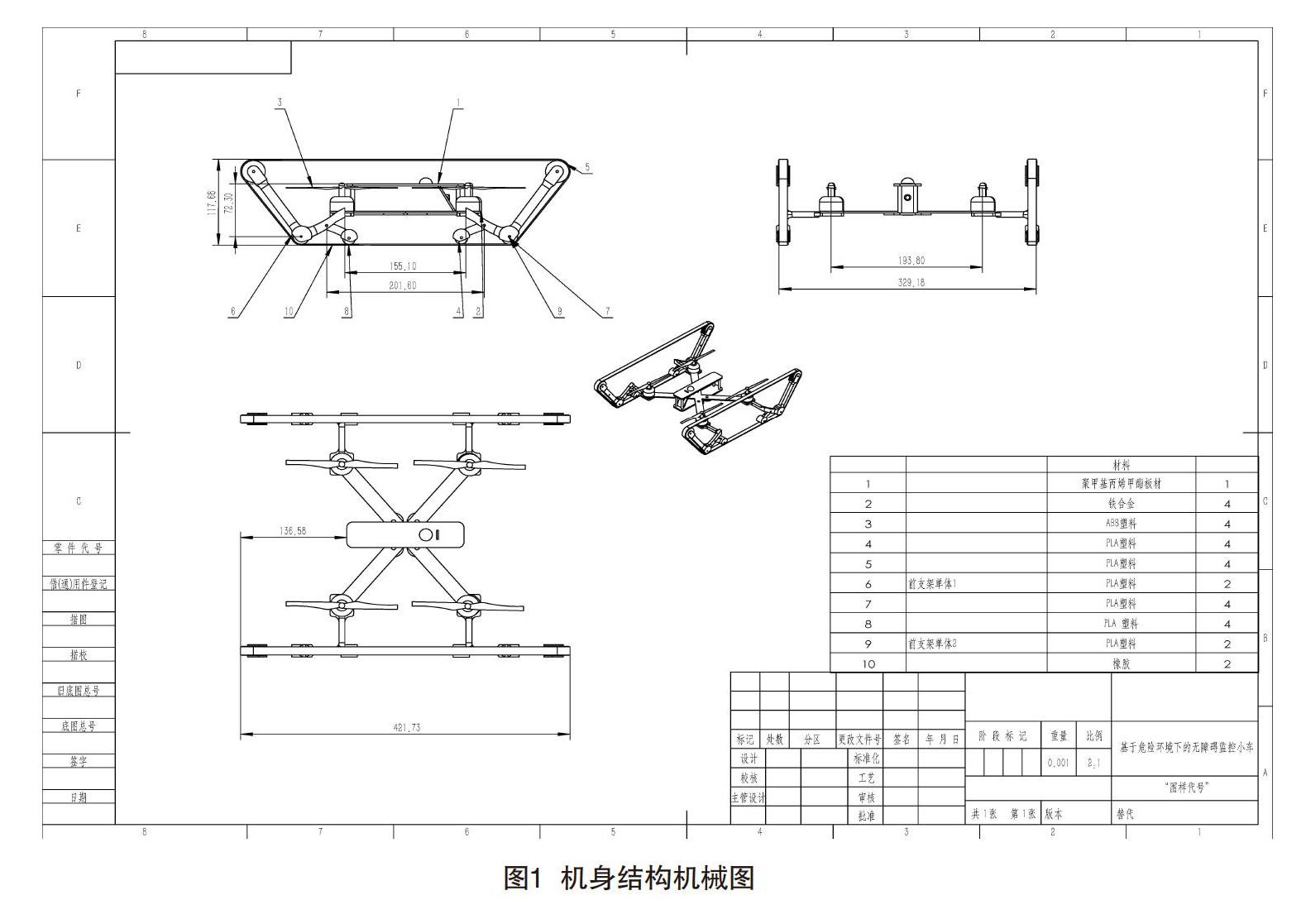
为了智能车的支架臂达到最好的承力结构和最大应力构架,设计了立体三角支架臂。机身结构机械图如图1所示,上面的车轮属于动力轮,下面的车轮为传动轮。支架臂属于履带受力的一部分,在保持最大伸展度的同时,保证了受力的稳定性。小支架臂的调节采用弹簧,既可以实现车体减震,又可张紧履带,防止出现履带松脱的情况,使小车在任何环境中都能正常运行[7]。
2 结语
与有人驾驶的救援飞机相比,该智能探测车具备体积小、造价较低、机动灵活、使用方便等优点,适用于高危地区的救援行动。对于环境方面要求低,无需机场,基于行动灵活、体积小的特点,可以轻松面对高层建筑的火灾环境,侦查到更多的地方,且对于施救地点的定位更加精确。本作品进行侦查,利用所安装的生命探测仪等外部设备,对搜救的目标进行探测,对于接下来的營救行动有着很大的指导、帮助作用。
[参考文献]
[1]张俊兰,艾瑞波.数字图像处理技术解析[J].延安大学学报,2009(4):22-26.
[2]陳炳权,孟凡斌.数字图像处理技术的现状及其发展方向[J].吉首大学学报,2009(1):68-75.
[3]张丽丽,王小平,张瑛.基于无人机影像生产高精度DEM的实践[J].测绘技术装备,2009(1):33-34.
[4]高建民.高层建筑设置避难层若干问题探讨[J].消防科学与技术,2011(4):293-295.
[5]熊彦哲.浅谈高层建筑的火灾隐患及防控对策[J].城市建设理论研究,2012(23):35.
[6]李杰.建筑结构防火研究的现状与发展[J].山西建筑,2010(2):95-96.
[7]沈建强.高层建筑火灾预防及安全逃生策略研究[J].科技视界,2013(25):41-42.
Design and implementation of the STM32-based intelligent test
and test vehicle for land-and-air and amphibious fire
Hong Pengxiang, Yuan Baohong, Wang Yiting
(School of Electronic and Electrical Engineering, Anhui Sanlian University, Hefei 230601, China)
Abstract:With the rapid development of the city, more and more high-rise buildings appear in our field of vision, but in these buildings is sometimes hard to avoid some accident happens in many difficulties, such as a fire, sometimes very likely because do not understand the situation and lead to rescue mistakes caused by rescuers hurt, even rescuers have dangerous life, therefore, our team plan to the way based on STM32 empty amphibious smart rover prototype design. Combined with the camera, GPS, infrared and other external equipment necessary for modern detection and detection, it can travel in the dangerous environment where the accident of high-rise buildings cannot be entered by ordinary people, thus providing efficient personnel search and rescue.
Key words:high-rise building; land and air amphibious rescue; intelligent detection
