一种室外远距离天线测试转台系统的控制方法
2019-01-03张健孙雨
张 健 孙 雨
(北京无线电计量测试研究所,北京 100039)
1 引 言
室外远距离无线测试转台系统由上位测试子系统、发射转台子系统和接收转台子系统组成,其中发射转台子系统和接收转台子系统处于室外,相隔距离为1.2km,本论文根据技术指标的要求设计了一种转台运动控制系统,对控制方法进行了相关说明,并进行了功能和特性指标的分析和试验。
2 转台控制方案
2.1 工作原理
室外远距离无线测试转台系统框图如图1所示。其中发射转台子系统和接收转台子系统通过无线网桥实现远距离通讯,接收转台子系统与上位测试子系统通过网线通讯;转台子系统由转台台体和便携式控制机箱组成,可以实现本地控制、状态显示和远程通讯等功能。转台断电时,可以通过手动旋钮调节转台各轴位置[1]。

图1 室外远距离无线测试转台系统框图Fig.1 Block diagram of outdoor remote wireless turntable system
本地控制面板和远程上位机分别可以接收和显示转台运动状态信息,并发送控制指令给运动控制器。运动控制器接收、处理指令信息,并进行轨迹规划,控制伺服驱动器驱动转台完成相应动作。
转台控制驱动系统的核心采用德国倍福公司的CP6706-0001-0050运动控制器,该控制器采用Intel®AtomTM双核处理器的嵌入式控制器,自带7英寸液晶触摸屏,主时钟1.75GHz,具有低功耗和无风扇设计特点,宽温带设计,结构紧凑。在I/O层,使用EtherCAT端子模块,采用EtherCAT总线与各轴驱动器进行通讯[2]。
伺服驱动器选用倍福伺服驱动器EL7211-0010,该系列伺服驱动器采用了基于电流和速度的PI控制的控制方式,支持快速动态变化位置控制;支持绝对式编码器反馈信号,采用单电缆技术(OCT),即电机驱动线和编码器反馈线采用一条单电缆,体积小,接线简单[3]。
2.2 机械结构
转台台体机械结构由方位运动模块、俯仰运动模块、极化运动模块以及相关的主支撑结构件、连接器组件以及配套线缆构成。转台台体结构组成如图2所示。方位轴可实现±20°旋转,俯仰轴可实现±20°旋转,极化轴可实现 360°无阻尼连续旋转[4]。
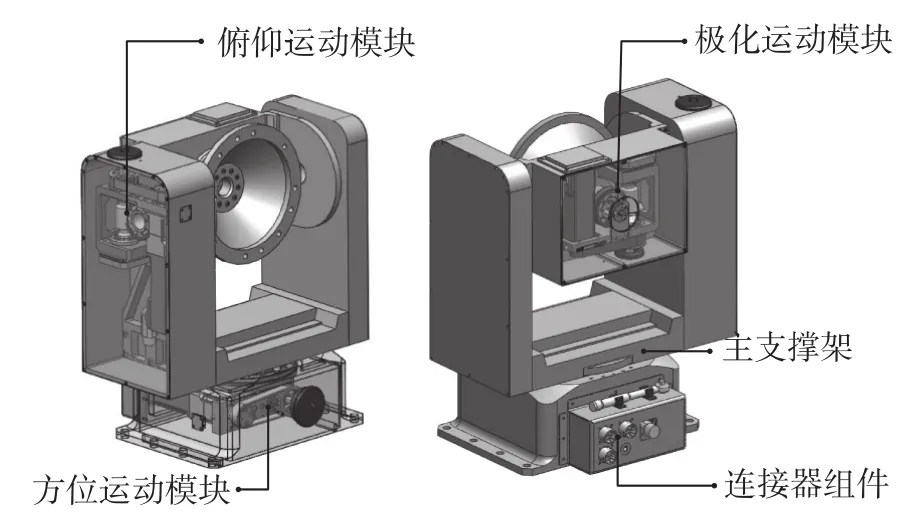
图2 转台台体机构组成图Fig.2 Diagram of turntable structure
方位运动模块和俯仰运动模块主要由驱动电机、行星齿轮减速机、蜗轮蜗杆传动副、同步带传动组件、限位机构及结构壳体等构成,同时配备三轴通用手动操作工具—棘轮扳手。极化运动模块主要由电机、蜗轮蜗杆副、同步带传动机构、旋转关节及支撑件构成[5]。
发射极化转台的控制机柜采用美国派里肯成熟产品安全箱Im2720型作为控制机箱外壳,机箱可关闭密封并实现行李箱式拖动,有效满足了体积小、便携性能好的要求,其外形如图3所示。
图3 机箱示意图Fig.3 Diagram of chassis
2.3 控制系统软件设计
转台控制系统底层运动程序采用ST语言作为程序开发语言,在TwinCAT软件中进行编程,采用模块化编程模式,各模块分别实现不同功能,控制功能模块如图4所示。底层运动程序按照接收远程或本地控制指令执行相应功能模块。
本地面板程序利用labVIEW软件作为人机界面开发环境,本地控制面板为液晶触摸显示屏,可以显示转台各轴的速度、位置、限位、活动轴等状态信号,控制各指令按钮控制转台各轴按照要求运动,同时完成与上位软件之间的通讯和解析功能。本地控制界面如图5所示。本地控制程序采用“生产者/消费者”模式,数据通过队列在多线程间传输,各线程为独立并发主体,互相解耦,控制框图如图6所示。
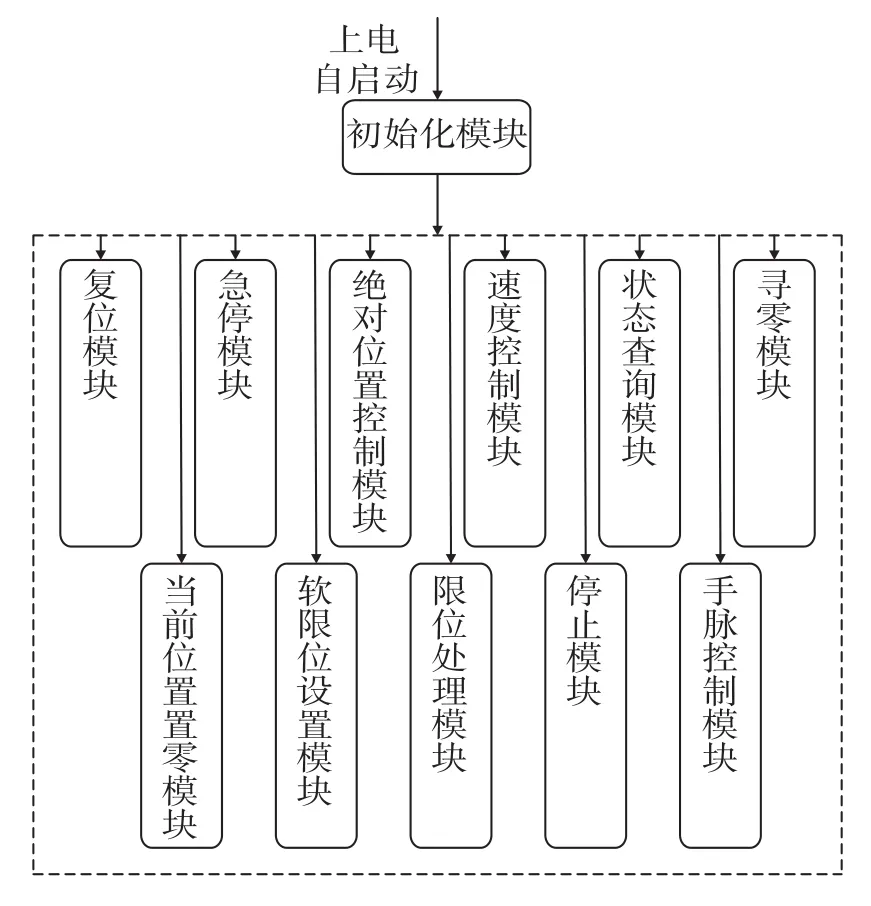
图4 底层控制模块框图Fig.4 Block diagram of the underlying control block

图5 本地控制界面Fig.5 Interface of local control
本地控制程序与底层运动控制器和上位测试系统间的通讯结构如图7所示。本地控制程序通过调用倍福公司提供的ADS动态链接库,完成与底层运动控制器间的读和写操作,进而实现状态信息和控制指令的通讯。主要接口函数包括:Adsportopen、Adsportclose、Adssyncwritereq、Adssyncreadreq等。
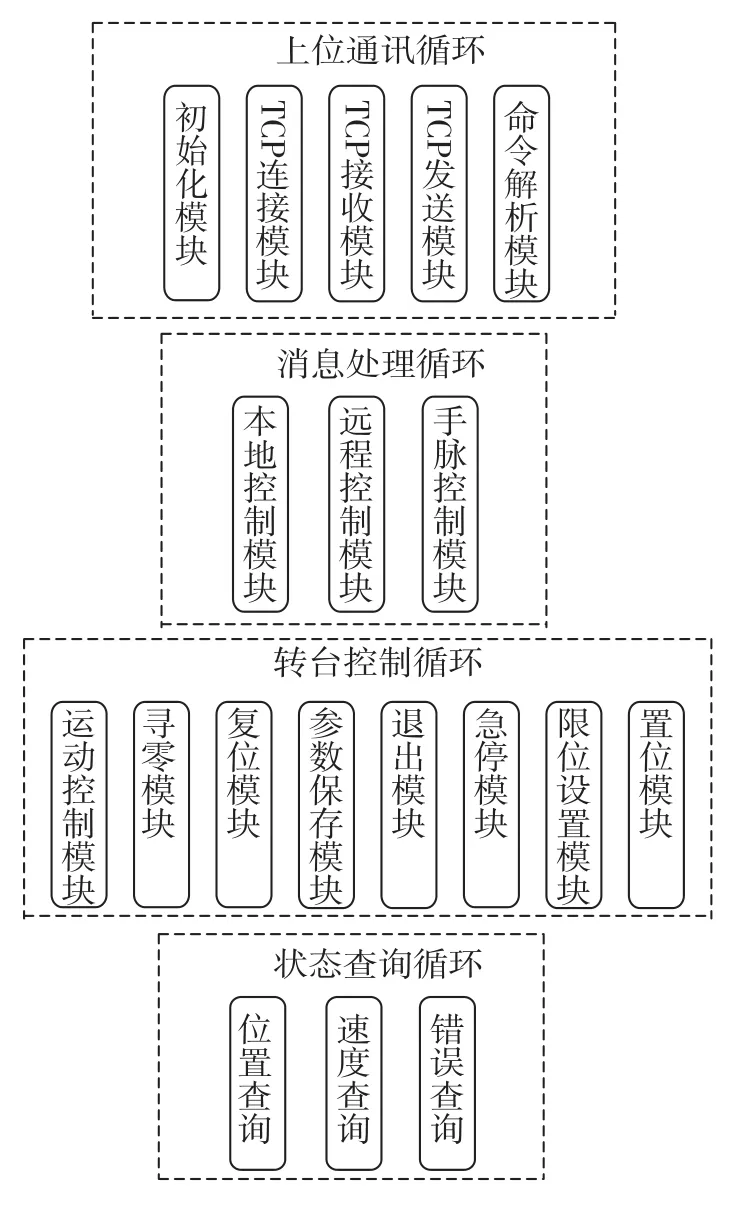
图6 本地控制框图Fig.6 Block diagram of local control
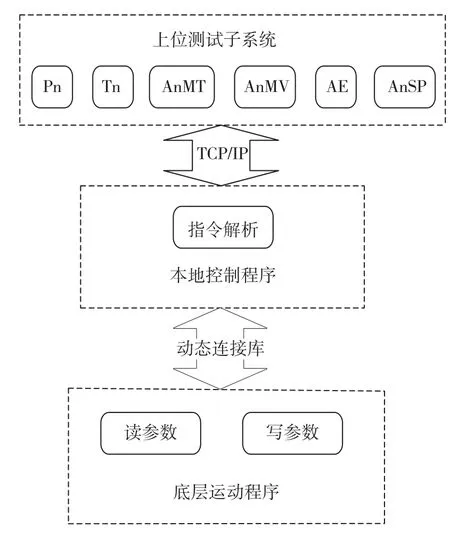
图7 室外远距离天线测试转台系统通讯结构示意图Fig.7 The communication structure of the remote antenna-test turntable
本地控制程序作为服务器,上位测试系统作为客户端,二者通过网口进行指令交互,控制指令收发等语句遵循TCP/IP协议。当客户端主动与服务器建立连接成功后,本地控制程序将接收到的信息进行指令解析,进而完成指令的识别,实现相应功能。控制指令形式简单,因而转台子系统对不同上位测试软件而言有较强的适应性和兼容性,方便上位软件编程和调用,极大降低了对上位软件的要求和编程工作量,使控制机箱具有更广泛的应用场合。主要控制指令有:
1)Pn:n轴当前位置查询指令;
2)Tn:n轴当前速度查询指令;
3)AnMT:位置运动模式指令;
4)AnMV:速度运动模式指令;
5)AE:急停指令;
6)AnSP:n轴当前位置置零指令。
3 控制系统特性分析
3.1 无线网桥实现远距离无线传输
发射转台和接收转台位于室外且相隔1.2km的距离,由于铺设网线等方式对环境要求较高且施工工程量较大,所以选择采用无线网桥的形式实现转台系统间的远距离通讯。由于天线测试场地较为空旷,所以不需另外设计传输中继。本文选择的无线网桥为TP-LINK TL-CPE510,可以实现12km的远距离可靠透明通讯,解决了室外转台系统的远距离可靠通讯问题。
3.2 采用EtherCAT总线
EtherCAT总线是一种基于以太网技术的现场总线形式,由德国倍福公司首先提出后,由于其具有接线形式简单、容易扩展、通讯速率快且成本低廉等优势,在工业领域中得到广泛应用。EtherCAT总线采用以太网的全双工通讯方式,但克服了传统总线的技术瓶颈,实现了通信速度的大幅提高和时间抖动的缩短[6]。
EtherCAT网络采用主从形式,除主站外最多可以连接65535个从站节点,网络拓扑形式多样,因此使用EtherCAT现场总线可以简化伺服系统接线,同时具有可拓展性,只需利用网线将驱动器添加入EtherCAT网络当中,就可以实现转台维数的拓展。本文提到的伺服系统可以拓展至十轴,方便伺服系统后续维数扩展,如图8所示。

图8 EtherCAT网络拓扑形式Fig.8 The network extension form of EtherCAT
EtherCAT与普通以太网最大的区别是报文经过从站时的处理过程,报文经过从站时,从站将其中属于它的信息提取出去,同时将需要发送的信息插入到报文当中,整个过程只需要几个纳秒。这样一帧报文包含了全部需要传递的数据,当报文沿着拓扑循环一周就可实现全部数据的传输,较之传统以太网的运行原理,通讯速率得到极大提高,同时也提高了数据的有效率。有文献曾做过测试,传递100个伺服轴的数据只需100μs,刷新100个I/O点只需3μs。EtherCAT运行原理如图9所示。
本文采用EtherCAT现场总线形式,伺服系统的数据传输效率得到很大提高,伺服周期大幅缩短,为控制器提供高分辨率和高准确率的触发信号,克服了以往触发信号频率低、误差大的问题。
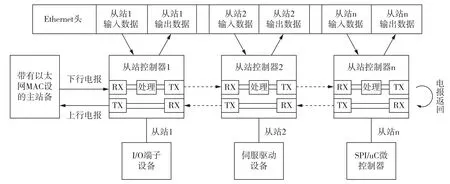
图9 EtherCAT运行原理Fig.9 The operating principle of EtherCAT
3.3 多种控制方式
转台子系统有四种控制方式可选择,分别为手动控制,远程控制,本地控制和手脉控制,多种控制方式为用户使用提供了更多选择,不同场景可以选择最方便的控制方式,改善了转台的用户体验。
3.4 模块化设计
转台子系统采用模块化设计,包括转台台体和运动控制组合机箱,其中运动控制组合分为电源模块、控制器模块和驱动模块三部分,这种设计方式方便调试和故障定位,提高了系统的可靠性和故障诊断的快速性。
转台采用的EtherCAT总线方式和OTC单电缆模式使得伺服系统接线减少,方便户外布线,同时信号可靠性提高,数据传输效率提升,系统易于拓展。
4 性能指标分析
4.1 系统性能指标要求
系统对转台的技术指标要求见表1。
4.2 系统分辨率
转台三轴均选用绝对式编码器作为位置和速度反馈原件,绝对式编码器为18位,分辨率为0.0014°。
4.3 定位精度分析
利用激光跟踪仪每5°等间隔取测量点,与控制系统反馈得到的位置值相比较求取误差,取误差的均方根值(简称RMS)为定位精度[7]。均方根误差为:


表1 发射和接收转台技术指标Tab.1 The technical indications of the transmit and receive turntable
式中:ΔX——位置误差,(°);X——激光跟踪仪读取的位置值,(°);Xm——码盘反馈的位置值,(°);e——定位精度,(°);ΔXi——每一测试点的位置误差,(°)。
根据以上方式测得系统定位精度为方位轴0.01°,俯仰轴 0.01°和极化轴 0.01°。
5 测试结果
设备研制完成后对主要指标进行测试,其结果见表2。由表2测试结果可以看出室外天线测试转台系统能够满足技术指标要求,实现相关功能。
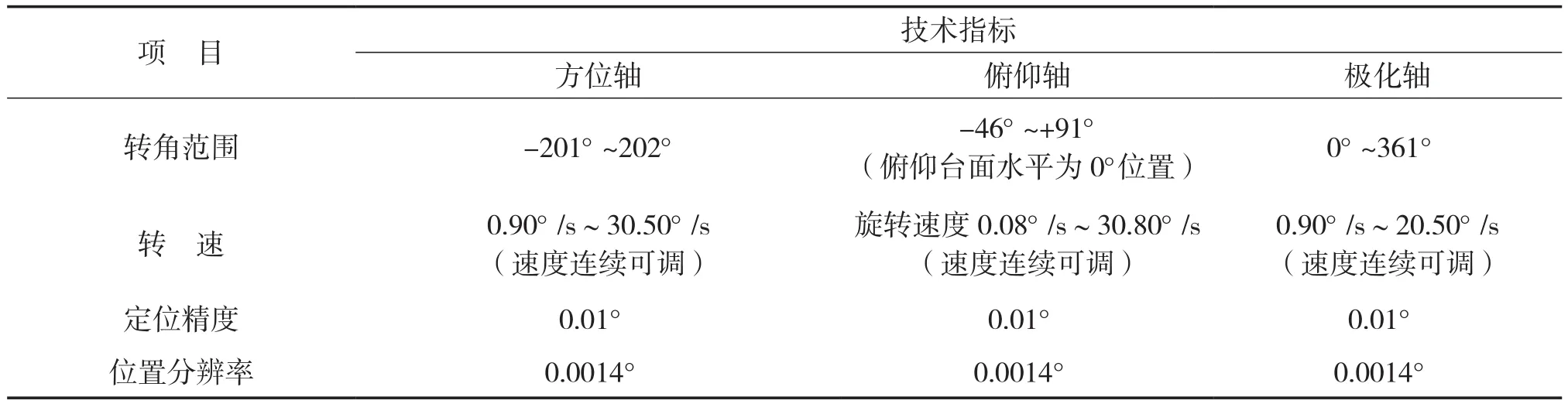
表2 转台性能指标测试数据Tab.2 The test data of turntable performance
6 结束语
本室外远距离天线测试转台系统通过对以往天线测试系统控制方法进行改进,实现了室外远距离天线测试的需求。本系统采用EtherCAT总线形式,通讯速率快,容易扩展且接线简单;同时具有较高的定位精度和位置分辨率,在多维运动转台中具有较为广泛的可复制和移植性;采用无线网桥实现室外远距离通讯,对环境要求降低,通讯可靠,无需室外布线。
本天线测试转台转作为室外天线测试系统的一部分,能够为天线提供方位、俯仰和极化三个自由度的运动,实现高精度位置控制,通过测试能够满足天线测试系统对转台的技术指标要求。
