基于RSSI测距的无线传感器网络质心定位算法优化*
2019-01-02尹亚波
尹亚波 徐 晴
(洛阳铁路信息工程学校 洛阳 471900)
1 引言
传感器节点定位是无线传感器网络的关键技术课题。1992年,剑桥大学定位系统实验室率先从局域定位技术展开探索,在技术方面取得较大成绩,并奠定传感器节点定位理论基础[1]。自20世纪90年代末开始,美国加州大学、日本早稻田大学等相继设立无线传感网络实验室,对相关技术进行理论研究和应用推广。随着研究方法及结果逐渐成熟,为确保节点自定位效果,定位算法也不断系统化[2~3]。当前,AHLOS、Active Badge等传感器定位系统应用范围较广,认可度亦较高。在这些系统中,主要运用的算法有APS、最大似然估计、三边测量以及质心算法等[4~5]。尽管不同算法内部逻辑存在差异,然而基本遵循如下优化步骤:测量未知节点与相邻节点距离;进行算法定位;对定位信息作优化处理[6]。
目前,无线传感技术已取得较大成果,其算法也愈发成熟。然而,各种算法都有其特定适用领域,相互兼容性及转化途径不足。因此,传感系统算法有待继续改进。总结而言,其主要存在定位精度、测距误差、成本较高、能耗不稳定、安全风险、节点移动性以及缺乏应用原型等方面问题或不足[7~8]。基于国内外研究现状,本文拟对无线传感器网络节点定位算法原理、优化进行研究。通过Matlab软件,对算法优化前后效果进行仿真和对比,希望对改进无限传感算法定位精度有积极意义。
2 改进的无线传感器网络节点定位算法
2.1 RSSI的测距原理
相较于测距算法,非测距算法具有可扩展性强、操作性高及运算简单等方面的优点[9]。尤其是质心算法,它不仅具有普通非测距算法的优点,而且具有成本低、使用范围广的特性。然而,在实际应用过程中,质心算法也表现出锚节点密度大、误差较高的不足。因此,有必要运用RSSI技术对质心算法进行优化,在充分发挥其优点的基础上,不断提升其定位精度,降低其成本。
一般来讲,基于RSSI测距技术的无线定位系统包含4个基本步骤,分别是信号发射、信号采集、信号转换以及定位计算[10]。其中,信号转换环节最为关键,它对信号衰减模型准确性有较高要求[11]。在研究过程中,最常用的信号衰减模型是shadowing模型,它包括pass loss模型、遮挡因子这两部分[12]。
pass loss模型表达式为[4]
式中:Pr(d)为距离为d时传感器节点所接收信号的平均能量;Pr(d0)为距离为发射中心参考距离d0状态下传感器节点所接收信号的平均能量;n为路径损耗指数。
由于信号强度单位是dB,因此可将式(1)转化为

遮挡因子是描述信号接收能力变化的随机参数,其单位是dB。将其置入shadowing模型时,可将该模型表达为

在运用shadowing模型过程中,非视距对RSSI影响十分显著。于是,通常会忽略遮挡因子,并将shadowing模型简化如下[13]:

式中:P为距离为d时传感器节点所接收信号强度值;P0为发射中心附近参考距离为d0处传感器节点所接收信号强度值。
运用时,为便于计算,将参考距离d0取值为1.0m。因此,RSSI公式可被简化为

式中:A为距离发射中心1m处传感器节点所接收信号强度值;n为路径损耗指数;RSSI单位为dBm。
依据式(5),可求得d的计算公式为

由式(5)和式(6)可知,参数n、A对RSSI、d的取值有决定性影响,并会进一步影响模型计算精度。如表1所示,A、n取值基于实际情况有特定变化区间。
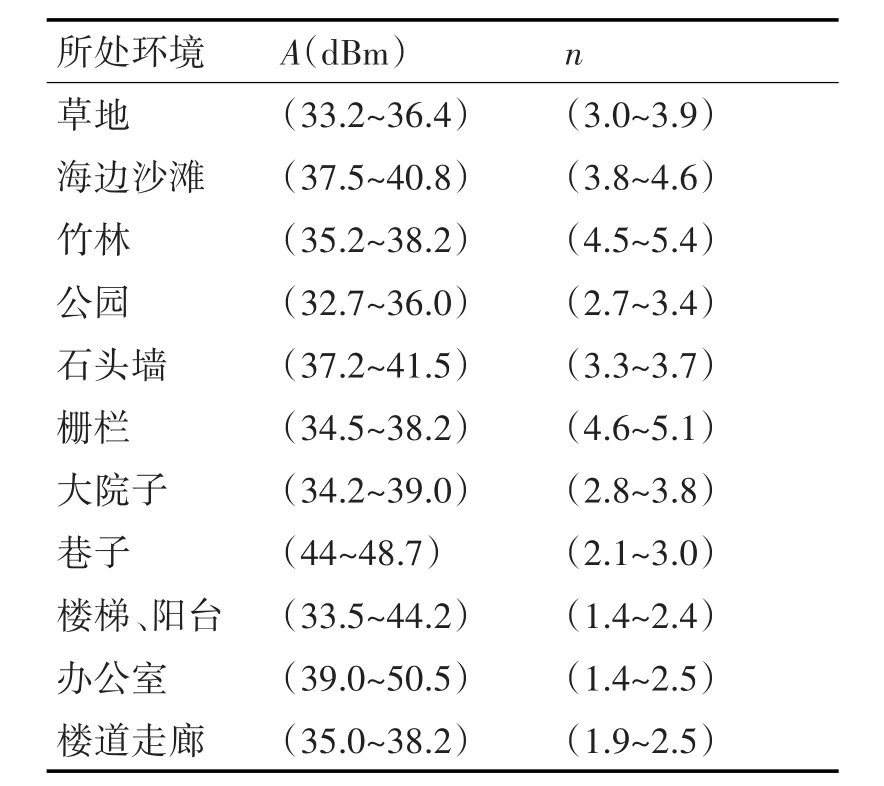
表1 各种环境下的A、n经验值统计
2.2 迭代式加权质心算法
2.2.1 基于RSSI的加权质心算法
对两个相邻节点,若RSSI越大,表明信号衰减越强,未知节点受测量节点的影响就越大;相反,RSSSI越大,表明信号衰减越弱,未知节点受测量节点的影响就越小。将已知锚节点坐标记为(x1,y2),…,(xn,yn),则可得未知节点D(x,y)的加权质心算法表达式为[14]
式中:RSSIi为第i个锚节点的信号强度值。
仿真结果表明,在资源既定条件下,相比传统质心算法,该加权质心算法具更佳定位精度。
2.2.2 基于RSSI测距校正值的加权质心算法
为提升质心算法对传播距离等外部环境的调整性能,需要通过实测距离值对RSSI进行校正。将已知锚节点坐标记为(x1,y2),…,(xn,yn),则可得未知节点D(x,y)的加权质心算法表达式为
式中:di为未知节点D与第i个锚节点经测距校正后的距离值。
仿真结果表明,相比RSSI质心算法,该加权质心算法具更佳定位精度。
2.2.3 RSSI迭代式加权质心算法
当锚节点密度较低时,可运用迭代式加权质心算法对已知节点进行迭代升级。基于式(8),迭代式加权质心算法表达式为
式中,qi为第i个锚节点所对应权值调整系数。
2.3 改进的迭代式加权质心算法
由信道传播模型可知,未知节点处RSSI值与锚节点间距呈负相关关系,与未知节点定位精度呈正相关关系。因此,须将RSSI测距值纳入质心算法,以对原算法坐标定位精度进行改进。基于该思路,将式(6)变形可得:

进一步地,可得改进迭代式加权质心算法表达式为
式中,t表示权值系数,其取值随着式(6)中A、n值的变化而变化。
2.4 迭代式加权质心算法权值优化
式(11)中,系数t取值变化较复杂。在运用过程中,需要对其作进一步优化。为求取最优权值系数t,取初始值t=1,以0.10为步长,对区间[0.5,2.5]内各取值作仿真分析。
2.4.1 不同锚节点密度
如表2所示,当锚节点密度由5.0%逐渐增加至10.0%、15.0%、20.0%、25.0%以及30.0%时,最优权值系数t值呈同向增加特征。
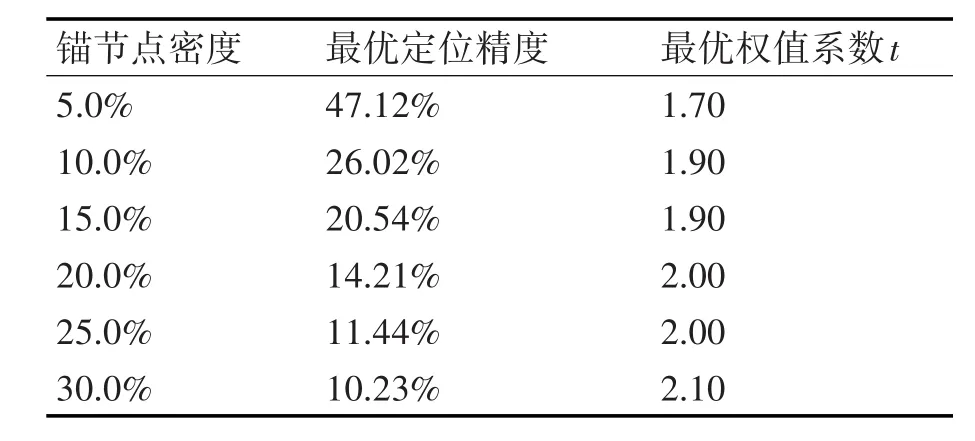
表2 不同锚节点密度下的结果
2.4.2 不同定位区域
如表3所示,当定位区域由50m×50m增加至100m×100m、150m×150m时,权值系数t值保持不变。
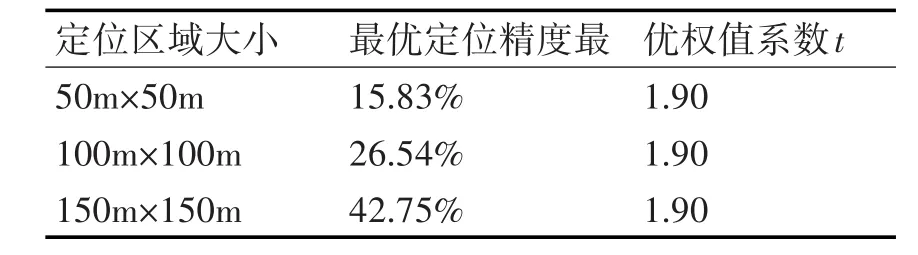
表3 不同定位区域大小下的结果
2.4.3 不同环境影响
为对整体环境作模拟,本文引入RSSI测距误差λ。如表4所示,由5.0%逐渐增加至10.0%、15.0%、20.0%、25.0%以及30.0%时,最优权值系数t固定为1.9。
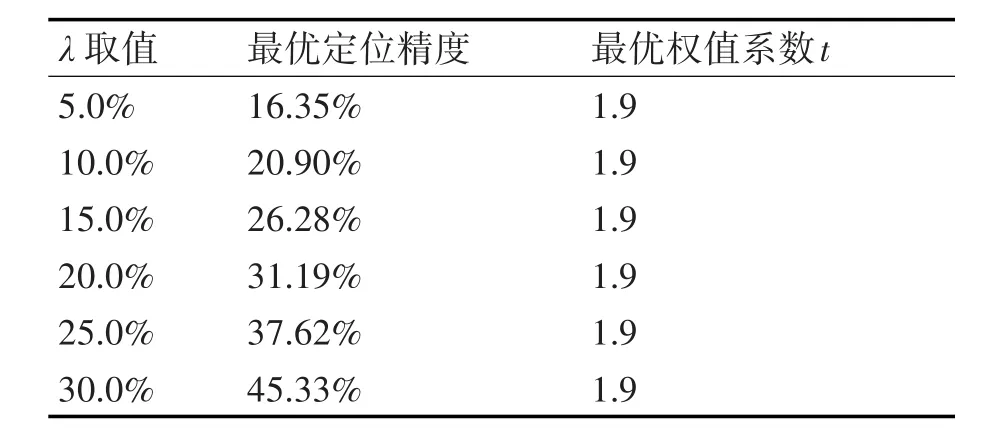
表4 不同环境影响下的结果
经过仿真分析可知,权值系数t主要受锚节点密度影响,与定位区域、环境干扰不存在显著相关性。综上,改进的迭代式加权质心算法表达式为
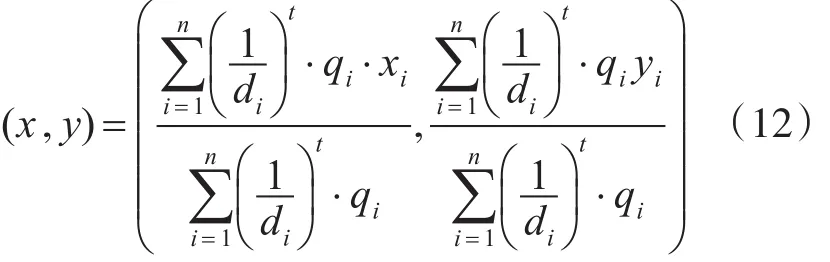
式中:di为锚节点i与未知节点M校正后测距值;qi为锚节点i的权重调整系数。
3 无线传感器网络改进定位算法仿真
3.1 改进算法实现步骤
如图1所示,改进定位算法包含信息广播、测距等4个步骤。其中,在信息广播步骤中,主要完成网络初始化、锚节点信息广播的任务。在误差校正步骤中,须监听锚节点数,并对其误差进行判断;直到将定位计算结果限定在特定区间内,才可进行锚节点标记,并将其升级为已知节点,从而完成优化定位。
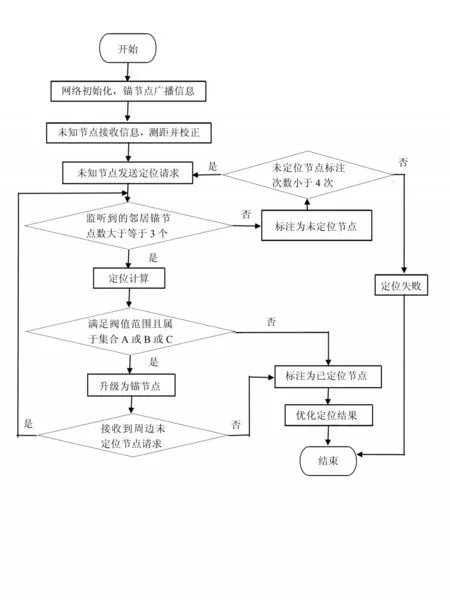
图1 改进的迭代式加权质心算法流程图
3.2 同类型算法定位精度仿真结果对比
为明确算法改进效果,在仿真过程中,须将原算法、常见算法与改进算法的定位性能进行对比。
3.2.1 锚节点密度的影响
如图2所示,随着锚节点数目增加,改进迭代式加权质心算法、IWCLA算法以及WCLA算法的平均定位误差均呈显著降低特征。当锚节点数量小于12时,WCLA算法平均定位误差最低;当锚节点数量超过13时,改进迭代式加权质心算法平均定位误差低于另外两类算法。

图2 锚节点密度对定位精度的影响
3.2.2 测距误差的影响
如图3所示,随着测距误差增加,改进迭代式加权质心算法、IWCLA算法以及WCLA算法的平均定位误差均呈显著增加特征。当测距误差超过2.0%时,改进迭代式加权质心算法平均定位误差低于另外两类算法;平均定位误差越大,该算法的定位精度优势越明显。
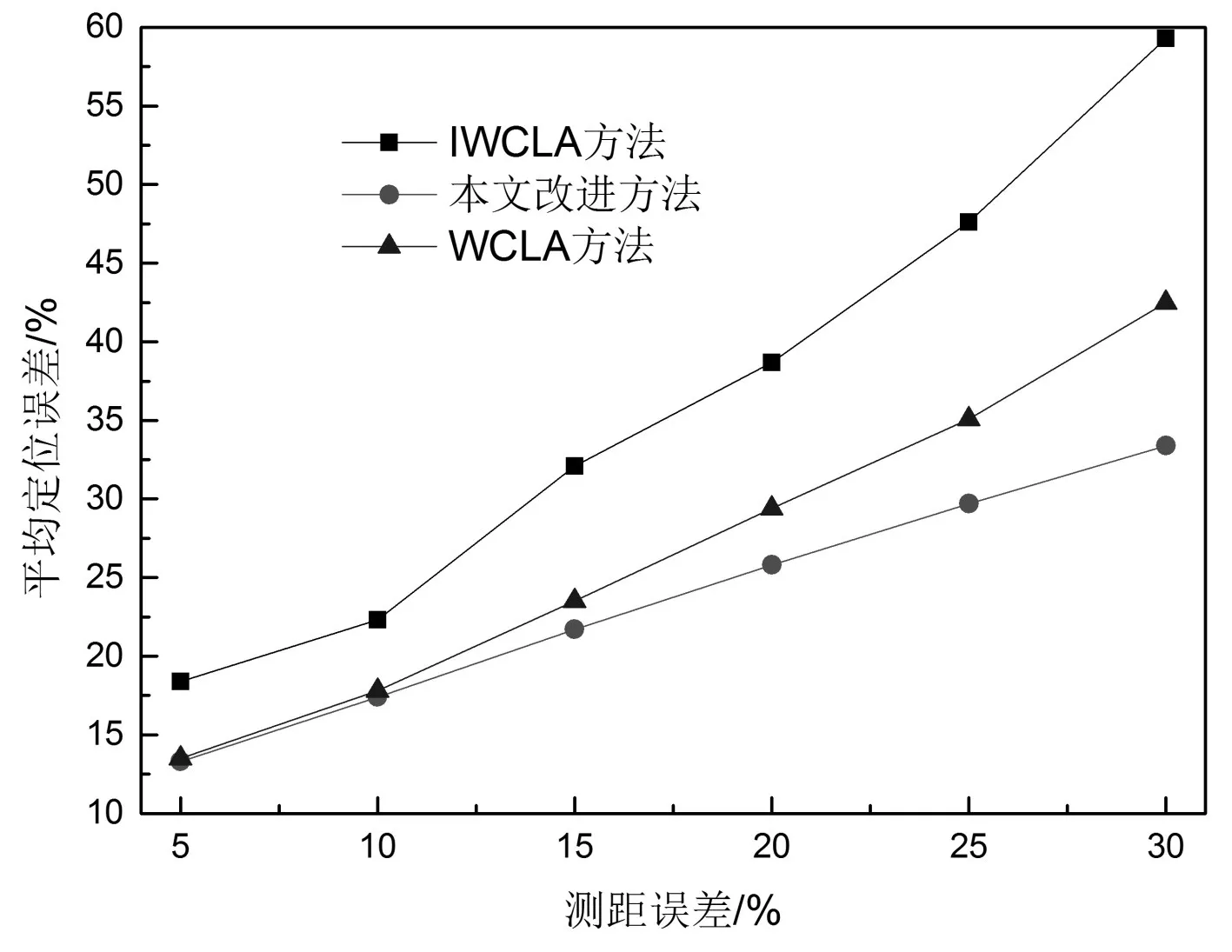
图3 测距误差对定位精度的影响
3.2.3 节点通信半径的影响
如图4所示,随着节点通信半径的增大,各算法下平均定位误差呈显著降低特征。其中,在所有通信半径条件下,改进迭代式加权质心算法的定位误差均值最低;当节点通信半径超过35m时,改进迭代式加权质心算法、WCLA算法所对应的定位误差均值较为稳定,且前者略低于后者。
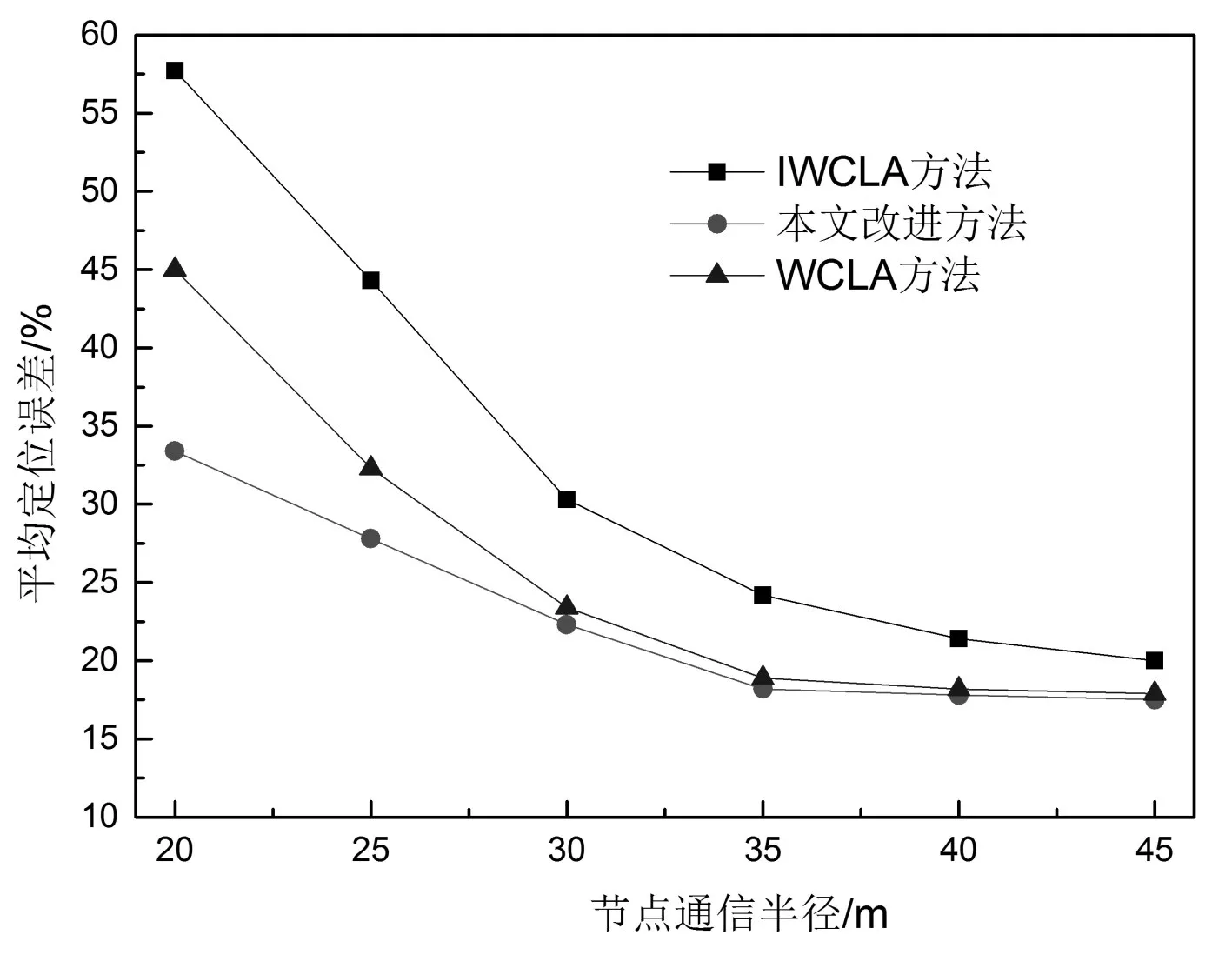
图4 节点通信半径对定位精度的影响
3.3 不同类型算法定位精度仿真结果对比
在定位精度仿真过程中,选择改进迭代式加权质心算法、AHLoS算法以及DV-HOP算法,从锚节点密度影响等方面对各自定位精度进行对比。
3.3.1 锚节点密度的影响
如图5所示,随着锚节点数目增加,三类算法平均定位误差均呈显著下降特征。当锚节点数目小于6时,改进迭代式加权质心算法的平均定位误差最高;当锚节点数目大于6时,改进迭代式加权质心算法的平均定位误差低于DV-HOP算法、高于AHLoS算法,且下降速度最快;当锚节点数目超过25时,改进迭代式加权质心算法的平均定位误差最低,定位精度达最优状态。
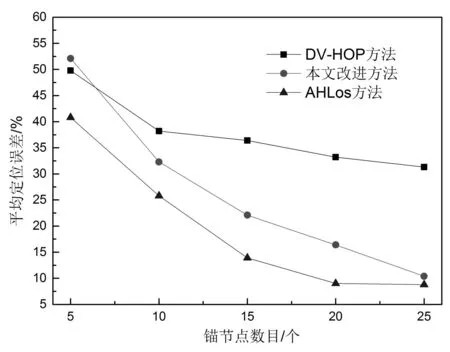
图5 锚节点密度对定位精度的影响
3.3.2 节点通信半径的影响
如图6所示,随着节点通信半径增加,改进迭代式加权质心算法与AHLoS算法的定位误差均值均呈下降特征;DV-HOP算法定位误差均值最大,且保持基本稳定。可见,在节点通信半径变化的情形下,改进算法与AHLoS算法的定位精度较为可靠。

图6 节点通信半径对定位精度的影响
4 结语
本文对几种常见无线传感定位算法进行分析,并重点研究质心算法优缺点。在此基础上,提出改进迭代式加权质心算法,并将其与传统算法进行横向、纵向仿真分析。本文得出如下几点结论:
1)在所有通信半径条件下,当锚节点数量超过13、测距误差超过2.0%时,改进迭代式加权质心算法平均定位误差低于经典算法,其定位精度更可靠。
2)锚节点数目大于6时,改进迭代式加权质心算法的平均定位误差低于DV-HOP算法、高于AHLoS算法,且下降速度最快;当锚节点数目超过25时,前者平均定位误差最低,定位精度达最优状态。
3)在节点通信半径变化的情形下,改进算法与AHLoS算法的定位精度较为可靠。
