车联网信息技术高速公路预警与应急避险模型
2018-12-28刘海洋冯仲科吴云鹏冯泽邦
刘海洋,冯仲科*,吴云鹏,呼 诺,冯泽邦
(1.北京林业大学精准林业北京市重点实验室,北京100083;2.北京交通大学轨道交通控制与安全国家重点实验室,北京100044)
0 引言
近年来,高速公路连环追尾事故时有发生,给国家和人民造成了极为严重的生命财产损失.如何避免此类连环追尾事故,减少经济损失和人员伤亡,是国家甚至世界性难题.研究汽车在高速公路突发交通事故,快速预报给后方车辆,对最大程度避免衍生事故和降低生命财产损失具有较高的研究价值.将车联网信息技术应用在高速公路预警和应急避险中具有较高的应用前景[1-2].
高速公路预警和避险问题早已成为世界性广泛研究的课题,将车联网技术应用在高速公路的相关研究中正是国内外现阶段的研究热点之一[3-5].国外多将车联网状态信息用于导航、道路路况信息分析和道路交通管理等方面,如Wei-Hsun Lee等[6]利用VANET技术提出了一种生态驱动咨询系统,通过使车辆连续地通过多个交叉口,以最小的停车可能性来减少排放和能源消耗,但此类技术依赖于道路设施,仅适用于车辆监测和管理,无法用于高速公路车辆预警.目前国内大部分研究多集中在智能驾驶和跟车模型等方面,如谭金华的沙尘环境下交通流跟驰模型及仿真[7].车联网研究方面主要集中在基础研究层面,如张登银等[8]进行了面向5G车联网连通性的关键理论综述.对车联网应用性的研究多效仿国外,集中在交通检测和管理,如孙川等的基于车联网数据挖掘的营运车辆驾驶速度行为聚类研究[9].关于车联网在高速公路预警和避险问题相关研究较少且不成熟,如秦严严等考虑多前车反馈的智能网联车辆跟驰模型[10],该研究将车联网用于跟车模型,但未考虑高速公路车辆险情预报和紧急制动无法避免正面碰撞的情况.
综上所述,研究利用车联网技术解决高速公路预警和避险等问题具有重要意义.本文将通过对车联网体系搭建、车联网车载设备研制、车联网移动客户端开发等研究,建立车联网高速公路预警和避险模型,拟实现车辆在高速公路上快速行驶时,前方车辆出现突发事故,后方车辆能够快速做出应急反应,避免连环追尾事故发生.
1 原理与方法
1.1 车联网信息技术网络构成
车联网预警与应急避险网络主要利用传感器技术、计算机技术、无线通讯技术、全球定位系统等,通过802.11p车载自组网协议,形成一个高速公路信息交互网络,通过控制中心协调形成完整的车联网信息技术预警和避险体系.车辆在高速公路中快速行驶时,车载设备将实时传输车量行驶状态信息(如行驶速度、车辆位置、车辆加速度等),当某一车辆遇到突发情况时,该车会立即将预警信息发送给周围全部车辆和控制中心,该车正后方距离最近的车辆会根据预警信息做出应急措施,同时控制中心会根据突发状况车辆的位置信息,处理和分析当前该路面其他车辆行驶位置和状况,做出判断并提供解决方案(如紧急停车、减速、避让、绕道等)发送给后方全部车辆,车辆预警原理如图1所示.

图1 预警原理示意图Fig.1 Schematic diagram of early warning
图1中当车辆A发生碰撞后,车载装备会立即向该车后方车辆B发出预警信息,同时车辆A将预警信息发送至控制中心,控制中心收到信息后会立即将该预警信息发送给A车辆后方附近全部车辆.
1.2 跟车预警原理
车辆在高速公路跟车行驶时,后车行驶速度大于前车,避免行车距离过近时驾驶员减速不及时产生追尾,因此在跟车行驶时车联网应急预警与避险会实时根据前车行车速度vf、后车行驶速度vb和行车距离s进行实时运算,预警模型[7]为

式中:am表示最大制动减速度阈值(因为车辆的最大减速度一般低于6 m/s2,所以am在本文中取4 m/s2);ss表示两车间最小安全距离(本文取5 m).
当预警模型成立时,车载装备立即生成预警控制信息,设备开始预警.当后车的制动减速度高于am时,追尾事故能够被避免.
1.3 应急避险模型
当前方车辆发生碰撞后,车载装备会立即向该车后方车辆发出预警信息,此时当后方车辆收到预警信息后车辆开始制动,车辆的制动过程可分为反应阶段、减速度上升及最大减速度3个阶段.当车辆处于反应阶段时,会在一段时间内匀速行驶.本文设定反应时间tr为0.5 s,初始速度为v0,在反应时间内车辆行驶的距离为sr,则在此条件下sr为

当车辆处于减速度上升阶段时,减速度au随时间t的变化规律呈双曲线[7],即式中:p,q,r为双曲线的参数,p=6,q=1 833,r=0.16.

与预警模型相同,取am为4 m/s2,则减速度上升时间内车辆行驶距离su为

当车辆处于最大减速度阶段时,行驶距离sm为

若存在t>0时,式(6)成立,则设备进行避险预警.

此时应急刹车已经无法避免追尾碰撞,需要进行避险预警方式判断并制定换道方案,图2为应急避险示意图.

图2 应急避险示意图Fig.2 Emergency avoidance schematic
考虑到避险预警中如果相邻车道后方有车辆行驶,存在车道变换时发生碰撞事故的可能,避险预警时需根据相邻车道车辆行驶状态模型进行处理,当车辆B无法通过紧急制动避免与车辆A相撞时,车辆B会根据当前相邻车道行驶的车辆E的位置信息、车速信息vE进行模型计算和分析,判断避险预警方式.
当车辆B收到车辆A预警后车辆B紧急制动刹车距离SB为
车辆E紧急制动刹车距离SE为

根据车辆当前位置信息,时间t>0时,如果存在可使应急避险模型式(9)成立的时间t,则说明可以安全进行应急换道,车辆B向车辆E及车辆E后方车辆发送换道预警.

若t>0时,t的任意值都使式(9)不成立,又因SS、SEB为距离均大于0,时间t内正常行驶距离tVB大于制动距离SE,所以可以得出

说明车辆B碰撞前,车辆E会迅速超过车辆B,因此制动方案采用车辆B先采取制动,等待车辆E超过车辆B后再换道,同时向车辆E后方发送换道预警.
1.4 软件设计
Android车载导航设备APP利用Java语言汇编实现,在Android Studio 2.1开发环境下集成后载入Android车载导航设备.车载导航设备APP运行后将全时段实时获取车辆状态信息(如车速、GPS状态、加速度等),并将该车辆状态实时上传控制中心,同时车载导航设备APP会实时与附近车辆建立网络连接,实时共享状态信息.当车辆发生突发状况后,该车辆车载设备APP会立即向后方车辆和控制中心播报预警,后方邻近车辆车载设备APP收到预警后,会根据当前行驶状态、路面情况和前方车辆状态别进行预警处理,并根据不同情况启用不同方案.为提高系统实用性,能对高速公路行驶车辆全面覆盖,APP可运行于Android手机移动客户端,驾驶人通过运行手机,与附近车辆建立网络连接,实时获取GPS状态、加速度等信息,计算行车速度,实时上传车辆状态信息至控制中心.图3为软件设计流程.

图3 软件设计流程Fig.3 Software design process
2 试验与分析
本文基于Veins的仿真测试平台搭建车路协同环境下的高速公路车辆碰撞场地试验.操作系统版本为Ubuntu Linux 14.04,OMNeT版本为OMNeT++4.4.2,SUMO版本SUMO 0.21.0,Venis版本为Veins 3.0.本文在Linux系统下采用Veins仿真平台构建了具备4G和DSRC通信网络的异构网络环境.
2.1 车联网碰撞预警与避险仿真试验
本文根据上述试验算法模拟突发路况进行预警试验,构建了1条长度5 000 m的单向3车道高速公路,驾驶员操作系数0.5,车辆最大应急减速度6 m/s2,行车预警减速度4 m/s2,在正常同向行驶的路段中,高速公路交通仿真参数如表1所示,网络仿真参数如表2所示.
在同一行驶车道中定义两个单独车辆节点车辆A、车辆B模拟跟车预警,前车A行驶速度为60 km/h,出发时间为10 s,后车B行驶速度为100 km/h,出发时间20 s,在无任何干扰情况下,后车B行驶在15 s后必然与前车A发生追尾.试验加入跟车预警模型,测试效果如图4所示.

表1 交通仿真参数Table 1 Traffic simulation parameters
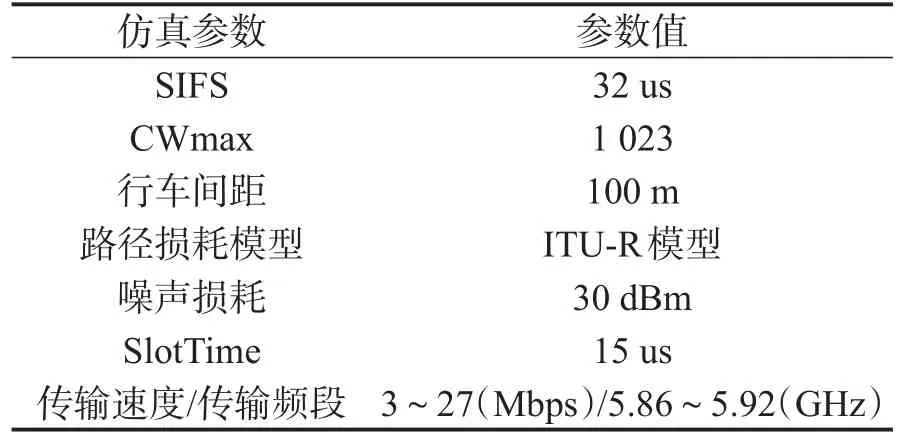
表2 网络仿真参数Table 2 Network simulation parameters
由图4可以得出,试验加入跟车预警模型后,车辆B在20.84 s后开始减速,并在0.13 s内达到预警减速度,整个减速过程持续9.11 s,并在总时间29.95 s时与车辆A同速,成功避免与车辆A相撞.车辆跟车预警模型可以有效避免追尾事故.

图4 车辆行驶距离对比图Fig.4 Comparison of vehicle distance
在高速公路模拟道路中加入突发事件进行测试,验证突发情况应急预警与避险模型效果,试验通过设置独立的事故车辆节点,在正常车流中加入突发事故车辆,软件模拟效果如图5所示.

图5 应急避险仿真效果Fig.5 Emergency obstacle avoidance simulation effect
从图5可以看到Time 1时刻,车辆A为事故车辆,人为控制车辆A进行紧急制动后,根据预警模型车辆A向车辆B发送预警信号并进行预警广播,提醒后方车辆,车辆D减速行驶,避免出现连环追尾;车辆B收到预警信息后经过信息分析处理,选择进行应急换道避险处理,并向车辆D发送换道预警信息,提醒车辆D减速.从Time 2时刻可以看出车辆B成功使用应急避险模型进行换道,车辆B、D成功收到预警信号减速并安全驾驶,测试无碰撞发生,预警效果明显.模拟试验结果表明,模型能在追尾无法避免的情况下进行减速换道处理避免追尾事故,同时能够向后续车辆进行预警,避免发生衍生事故.
2.2 公路试验
本实验在雄安新区省道S333路段进行道路测试,道路试验4辆小型轿车同路同向行驶,为保证行驶安全,车速行车间距约100 m,分别搭载Android车联网预警与应急避险APP进行预警,4辆车同速以60 km/h行驶,模拟首车遇到突发情况后车紧急制动,分别记录收到的预警信号时间,GPS状态,车辆制动反映时间等信息,测试车联网预警与应急壁障预警APP性能,并与无设备时进行对比分析.车辆行驶距离和反应时间实验结果如表3所示.

表3 公路试验结果Table 3 Highway test results
由表3可以看出,在首车发生紧急制动的情况下,第2辆车反应时间与未使用系统反应时间基本相同,该段反应主要取决于驾驶人员本身;第3辆与第4辆车在反映时间与行驶距离上具有明显优势,反应时间和行驶距离更短,这是因为未使用车联网预警与应急避险预警系统的驾驶人员仅能通过前车行驶状态进行路面判断,只有前车开始制动后才开始反映,反应时间随着车辆数量增加成倍增长,试验中第3车、第4车行驶距离分别相差9.2 m和21.4 m,该距离可在交通事故中起决定性作用.
3 结 论
本文对车联网信息技术高速公路预警与避险模型进行研究,针对高速公路中快速行驶的车辆遇到突发事故,利用车联网获取车辆路面信息,对事故后方车辆做出不同的预警和避险方案,帮助后方车辆驾驶员做出应急措施.本研究在高速公路上的跟车预警效果较好,能够及时做出预警,避免追尾事故;应急预警时能够根据车联网信息进行分析,判断路面状况并提醒驾驶员快速做出反应,在车辆正面无法避免碰撞时,软件模拟结果证明该模型成功进行了避险,避免了追尾事故的发生;公路实验证明,系统通过车联网进行预警,高速公路车辆突发状况时,提醒事故后方车辆更快做出反应,减少行车制动距离,在密集的行车路段,能够较大程度降低连环追尾等事故的发生,提高高速公路驾驶安全.
本研究在下一步工作中将利用手机传感器建立警报模型,在移动客户端中实现报警功能,弥补硬件设备的不足,同时下一步将预警模型嵌入汽车导航地图中,增加路面车辆信息可视度,实时为驾驶员提供参考.
