减小相位测量轮廓术中多路径效应的影响
2018-12-22卢勇,刘凯
卢 勇,刘 凯
(四川大学 电气信息学院,四川 成都 610065)
0 引 言
在实际测量中由于器材和环境等的影响,需要考虑相位测量轮廓术(PMP)[1-6]中的各种误差,如非线性误差[7]、量化误差[8]等。在扫描目标有反射率变化剧烈的区域时,会出现多路径效应误差。针对PMP中的多路径效应,许晓畅等[9]提出了一种多路径模型描述摄像机的采样过程对像素点的平滑作用,并利用两个方向扫描得到的相位进行融合,但是没有对模型进行使用,且操作繁琐,算法复杂。杨洋等[10]使用光强调制确定受多路径影响的区域,利用线性插值对误差区域的相位进行修复,但针对性不强,当被测物体表面形态不平缓时难以修复准确。
为了减小多路径效应对PMP的影响,本文提出了一种修复图像的方法和一种修复相位的方法来减小多路径效应对PMP的影响。方法一验证了图像修复对于减小多路径效应造成的误差的有效性,提供了一个方向。方法二充分利用了许晓畅等[9]提出的模型,有效地减小了多路径效应造成的误差。
1 PMP多路径效应
PMP系统由投影机、摄相机和控制单元组成。投影仪投射编码图案到被测物体表面,摄相机同步抓取被测物体表面反射的编码图案。摄相机采集完被物体扭曲的编码图案后,就可以利用采集图像通过解码得到被测物体的三维形貌。在图像采集阶段,摄相机中的电耦合单元(CCD)的成像过程可以看作一个积分过程[11]。由于摄像机的像素有限,积分单元在积分过程中包含了相邻其它像素的光强信息,导致采集图像的光强信息不准确。这就是多路径效应。当被测物体表面存在反射率变化剧烈的区域时,这些区域的光强值会出现严重的偏差。
多路径效应产生于摄像机的采样过程,采样的结果即拍摄的图像。Zhou等[9]指出,CCD相机成像的实际像素光强值是真实光强值和点扩散函数的卷积。作为PMP重建的初始数据,采集图像的灰度值误差会对重建结果造成不良影响。摄像机的多路径效应造成采集图像的光强值不准确,相位计算就会出现误差,从而导致三维结果的不准确。许晓畅等[9]指出,由摄像机的多路径效应引入的相位误差表达式为
(1)
其中,φ表示理想相位值,αc是理想图像中像素点的理想反射率。从式(1)中可以看出,相位误差和物体表面的反射率有关。沿Y方向扫描时,与反射率相关的相位误差表达式[9]为

(2)
其中,α1~α9表示一个3×3邻域内像素点的理想反射率,按从左到右,从上到下的顺序排列,Δφy1是Y方向相邻像素的理想相位之差。从式中可以看出多路径效应对相位的影响主要出现在反射率变化剧烈的区域。
2 修复方法
2.1 对原始图像修复的方法
在反射率变化剧烈的区域,受影响的像素数不止一个。其它的边缘检测算法如sobel算子等,检测出的边缘较细,不能检测出所有受影响的像素点。若使用膨胀处理很容易会确定出非误差区域的像素,产生冗余的数据。本文利用光强调制的方法逐像素检测[10],可以很准确地确定出受多路径效应影响的区域,而且操作简单。光强调制Bc的表达式为
(3)

Bxc,yc=Bcxc,yc-Bcxc+1,yc
(4)
光强调制的值和目标表面反射率的值成正比[10],设定一个阈值就可以确定出反射率变化剧烈的区域。
由于多路径效应开始于CCD的采样过程,采样得到的图像出现灰度值的误差。因此本方法对采集图像中反射率变化剧烈的区域进行研究,利用PMP的相移特性修复误差区域的灰度值,减小多路径效应误差。当没有投影光栅时,一个黑白交界的区域的正确灰度值是黑白分明的,而实际灰度值为黑白渐变,相当于对正确图像进行了平滑处理,要得到正确灰度值只需要再进行锐化处理即可。然而在PMP中被测物体被正弦光栅覆盖,误差区域的实际灰度值是有误差的灰度值覆盖上了相移的正弦光栅。在投影高频光栅的图像中,光栅的灰度变化率和扫描目标灰度变化剧烈的区域的灰度变化率已经较为接近了。如果单纯地使用锐化处理,对光栅部分也会产生作用。而希望得到的结果是对目标的灰度值进行校正,同时保留正弦光栅原来的灰度值。本文利用PMP中光栅的相移特性达到这个目的。
投影机投射同一频率的帧数为N时,每一帧之间的相移变化为2π/N,相机采集的图像可以表示为

(5)
其中,(xc,yc)表示抓取图像中像素的横纵坐标,Ac是抓取图像的均值,Bc是每个像素点的调制光强值,n为相移指数。在N帧图像中,任意误差像素点被一个周期的正弦光栅的不同的N个点覆盖,这N个点在其它某些帧图像中则会相移到非误差区域。用相移到非误差区域的光栅点的灰度值恢复误差区域的灰度值,使每一帧图像的误差区域都得到修复,从而得到正确的图像信息。
本方法使用白色区域的光强值修复误差区域,许晓畅等[9]指出,摄像机的多路径效应类似于3×3的平滑掩模,即受多路径效应影响的区域的大小。因此,误差区域的像素使用3×3区域以外的非误差点修复。图像中从上到下为白色到黑色区域误差点的修复表达式为
(6)
黑色到白色区域误差点的修复表达式为
(7)
式中:I的下标表示同一频率的图像次序,范围从1到N,i为正数。m的取值大于抓取图像中光栅从误差区域到非误差区域所需相移的帧数,i的取值大于误差区域距离最近的非误差区域的像素数。由于目标与扫描装置的距离影响,先用所需频率,任意帧数的正弦光栅对目标进行一次预扫描。为了便于m和i的取值,根据预扫描抓取图像中反射率变化剧烈区域的邻域的光栅确定N合适的取值,再进行扫描。被测物体在扫描方向的形态线性变化或变化较为平缓时,参数的取值适用于所有区域。本文实验中的m和i均取为4。
2.2 对相位进行校正的方法
因为多路径效应的过程类似于数字图像处理中的平滑作用,所以用平滑掩模来建立多路径效应的模型[9]。经过实验,使用3×3模型对相位修复的效果比其它维度的模型更好。同时,在相位误差公式中,将每一个3×3的像素区域近似为平面,区域越小,由近似而产生的偏差也越小。因此本方法使用许晓畅等[9]提出的3×3的平滑掩模模型。由于光强调制与目标表面的反射率成正比[2],设每一点的反射率
(8)
其中,k为比例系数,代入式(2)将k约分,可得相位误差为

(9)
其中,Bc的下标表示3×3邻域内的位置。Δφy1=2π/H为相邻像素理想相位差,H为理想情况下抓取图像中有效图案部分的高度,即Y方向的像素数量。由于实验环境等的影响,抓取图像和相位并不是完全分布在相机抓取的范围内,严格按△φy1=2π/H取值计算可能得不到最好的修复效果,因此本文将H当作一个可调参数,通过试取值,确定参数的最优取值,本文的实验中经试取值确定为290,可以得到最好的效果。式(2)中αc1~αc9为邻域内像素点的理想反射率,而实际得到的反射率是受到多路径影响的反射率,Bc也是受到多路径影响的光强调制。在反射率变化剧烈的区域内,反射率高低两侧的光强调制值相互影响,使得实际情况下,式(9)中3×3区域的第一行和第三行之间的差的绝对值比理想值偏小。而3×3平滑滤波后,分母的值与平滑滤波前的值相同。结果就是计算出的实际相位误差比理想值偏小,始终能够减小相位误差,不会造成过补偿。
在反射率由高突变到低时,实际相位值比真值小,误差计算结果为正值。反射率由低突变为高时,实际相位值比真值大,误差计算结果为负值。因此得到修复后的相位为

(10)
3 实验结果
本文的PMP系统包括一台分辨率为800×600的CASIO XJ-A155V DLP投影机,一台分辨率为640×480的Prosilica GC650摄像机和一台计算机。扫描目标为一张印有黑色图案的A4纸,扫描方向为竖直方向。实验结果表明,即使增大投影光栅的频率和帧数,并不能减小多路径效应造成的相位误差。在本文图像修复方法中,为了使得光栅移动时能逐点覆盖,同时减小其它随机噪声等对系统的影响,扫描光栅在基频f=1时取N=436,通过预扫描确定在高频f=32时取N=15。采用以上光栅扫描,可以使得非线性误差和随机噪声可以忽略不计[2],避免了其它误差对PMP系统的影响。
本实验的扫描目标为如图1所示的印有黑色图案的A4纸。摄像机抓取投影光栅后的目标图像,将图案左下部分局部放大如图2(a)所示,可以看到在图案黑白交界处出现了模糊的现象,这些模糊都是错误的光强信息。使用式(4)确定误差区域后,对采集图像进行式(6)和式(7)的处理。经过图像修复后,从图2(b)中可以看到黑白交界的模糊现象得到了很好的改善,更接近于真实的光强信息。

图1 有图案的A4纸
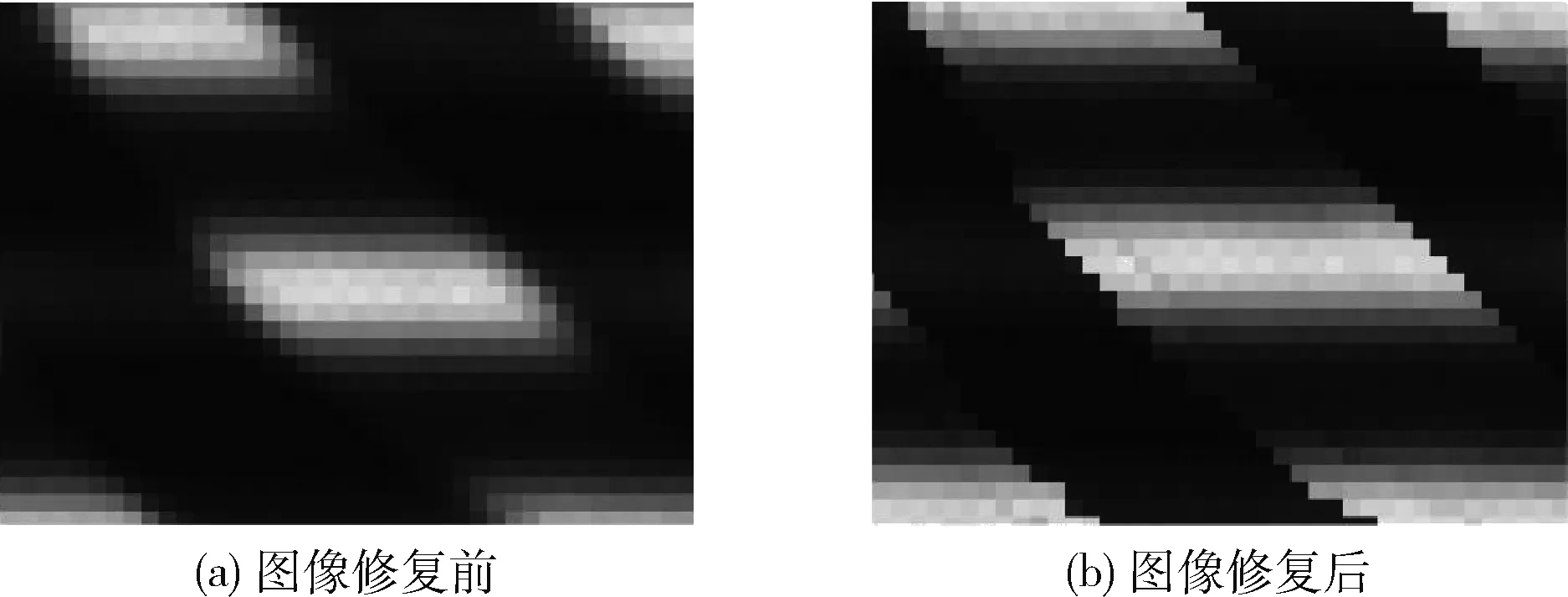
图2 投影光栅后采集图像中图案左下部分修复前和修复后
实验目标的三维重建结果如图3所示,去掉纹理信息后可以看到在图案边缘有黑色痕迹,黑色痕迹表明这些地方与周围的深度信息不一样,而A4纸是一个平面。截取三维重建结果的误差区域,旋转得到其侧视图,可以看到,在黑白交界区域确实出现了错误的凹凸现象。通过式(4)确定误差点后,对抓取图像使用式(6)和式(7)进行处理后,图3(b)展示了经图像修复后的三维重建结果。相位修复方法对由原始图像计算得到的相位矩阵的误差点使用式(9)和式(10)进行相位补偿,图3(c)为相位修复后的三维重建结果。由于图像修复依赖于光栅相移后区域的光强值,当误差区域为上下部分没有白色区域的夹角时,图像修复阶段就无法获得其正确的光强值,导致修复失效。在图3(b)的重建结果中可以看到部分区域未得到理想的修复结果。而相位修复方法无此限制,整体修复效果都较为稳定。
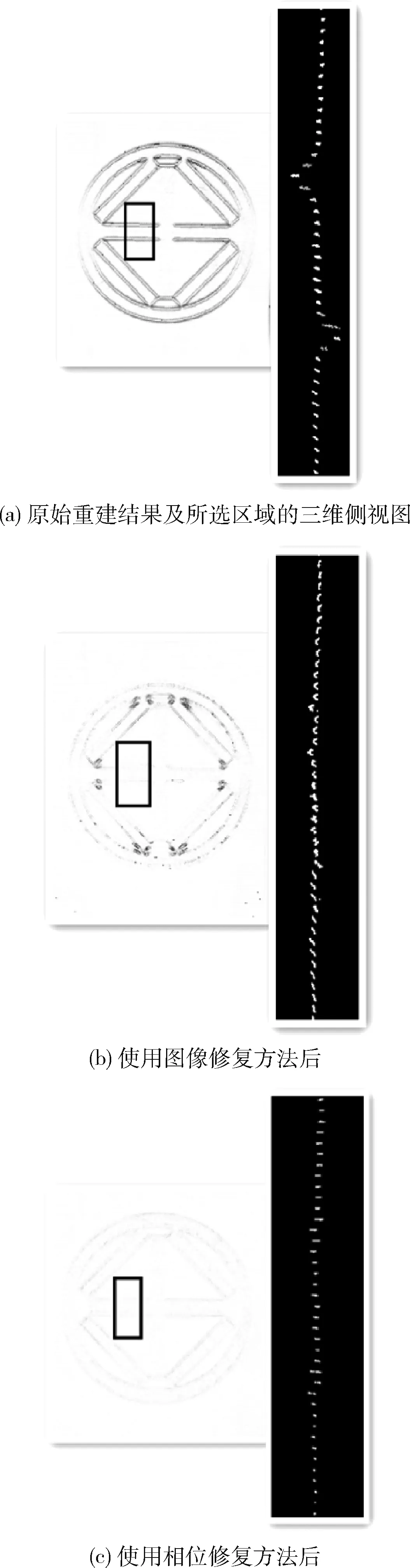
图3 有图案的A4纸各方法修复前后的三维重建结果及其侧视图
4 分析与讨论
本文扫描一张白色A4纸当做无多路径效应时的真值。因为扫描带图案A4纸和白色A4纸是两次扫描不同目标,表面形态和摆放位置都有所不同,因此相位误差不为一条直线。但修复前在多路径误差区域相位误差必然远远大于其它区域。图4选取相位误差矩阵第283列的138行到400行。展示了校正前后的误差比较,表明本文方法均有明显的修复效果。为计算均方根误差,已将误差曲线移到0附近。

图4 各方法修复前后的相位误差曲线
受多路径影响区域的相位误差修复前的均方根(RMS)为0.0079,经图像修复后的均方根为0.0054,减小了约31.65%,经相位修复后的均方根为0.0053,减小了约32.91%。相位误差的均方根值见表1。

表1 相位误差的均方根值
为了验证本文方法对于非平面目标的修复效果,扫描一个印有黑色图案的白色圆柱面。同样的,扫描光栅在基频f=1时取N=60,高频f=32时取N=15。图5为扫描目标圆柱面,图6(a)为修复前的三维重建结果,图6(b)为图像修复后的三维重建结果,图6(c)为相位修复后的三维重建结果。
从图6(a)中可以看出,光滑的圆柱面由于多路径效应在黑色图案边缘产生了凹凸。在图6(b)中可以看到,由于圆柱在Y方向的形态变化较大,使得当前的图像修复算法不适用。图6(b)经相位修复后,凹凸的状况得到了改善,使重建结果更接近物体的实际三维信息。
图5 扫描目标
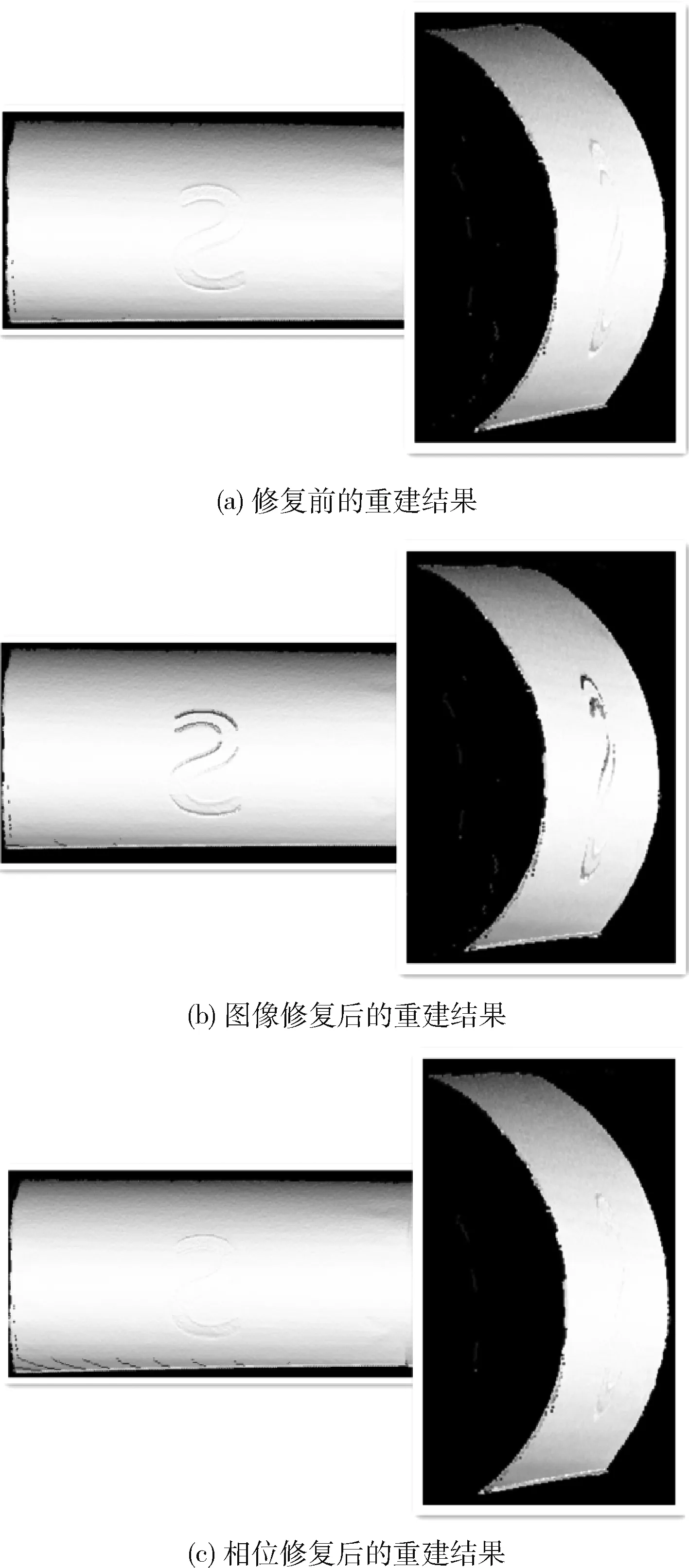
图6 圆柱面重建结果
5 结束语
经本文图像修复方法修复图像后,重建结果的误差得到了明显的减小,验证了修复图像对于改善重建结果的有效性,有效提高了相位测量轮廓术的精度。图像修复方法利用PMP的光栅相移特性,无需额外建立模型,针对采集图像中的被扫描目标的灰度值进行修复,不影响覆盖的正弦光栅的灰度值。经本文相位修复方法对相位进行校正之后,重建结果得到了改善,无论对于平面还是非平面都有较好的表现。通过计算相位误差,点对点地进行相位补偿,不会对周围的区域造成影响。许晓畅等[9]的方法使得相位误差的均方根减小了21.30%,本文中图像修复的方法使得相位误差的均方根减小了31.65%,且不需要增加额外的扫描方式,算法简单。相位修复的方法使得相位误差的均方根值减小了32.91%,直接对相位误差进行补偿。杨洋等[10]的方法使得相位误差的均方根减小了57.32%,但其算法只是利用误差区域两侧的值进行插值,有可能掩盖误差区域的真实信息,不适用于物体形态复杂的情况,本文的图像修复方法恢复采集图像中误差区域的正确光强值,针对性地减小多路径效应的影响。但目前的图像修复算法存在不足,当误差区域在一个光栅周期内的上下部分都没有白色区域时,无法得到正确光强值进行修复。同时,在存在多路径效应的区域,被测物体在扫描方向形态变化为线性或较为平缓时式(8)和式(9)才适用。相位修复方法对相位误差进行补偿,对物体的形态和表面纹理没有特殊要求,具有较好的普遍适用性。