IP RAN中时钟同步技术分析与比较
2018-12-18朱先飞宛传东
□ 文 朱先飞 宛传东
1 引言
由于传统的移动承载网络有成本高、可获取性差、带宽资源有限等问题,在很大程度上限制了移动宽带的发展。运营商迫切需要构建一种具备全场景支持能力、电信级、易维护、具备弹性能力的移动承载网,来满足移动宽带的各种需求,提升移动宽带的可获取性。IP RAN技术以其组网灵活、高容量、扩容性强、维护成本低及其高复用效率的特点,成为未来移动承载网的主流方案。[1]IP RAN方案基于灵活IP通信的设计理念,以传统的路由器结构为基础,其业务转发推荐采用动态控制平面的自动路由机制。[2]
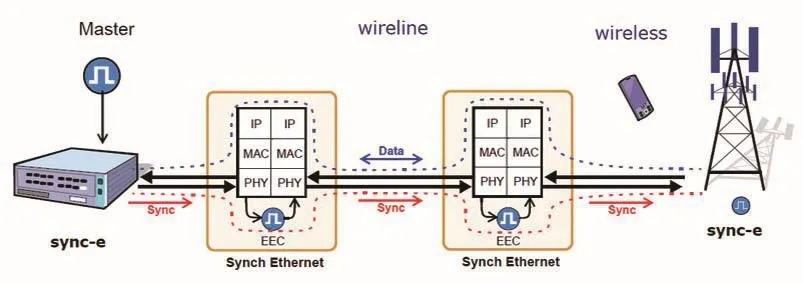
图1 同步以太网技术时钟信号传输示意图
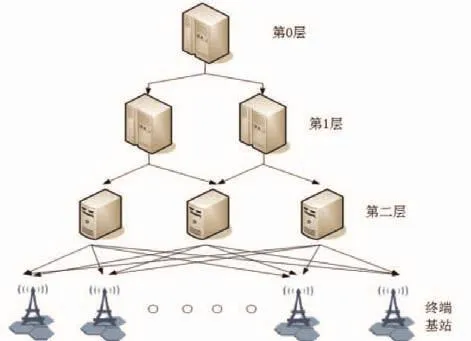
图2 NTP拓扑图
由于传统的以太网使用的载波监听多路访问/冲突检测(CSMA/CD)机制会引起通信的不确定性,为了消除这种不确定性,基于以太网通信技Positioning System全球卫星定位系统)来解决,而该方案存在成本和军事上的风险。由于IP RAN是作为移动承载网,它既可用于异步基站,也可用于同步基站,所以要视其应用需求来确定使用何种同步技术,目前可用于IP RAN的时钟同步技术包括同步以太、IP clock、IEEE 1588协议等。[4]
2 同步以太
术的通信协议要求采用基于确定性调度的通信机制。这些通信协议主要采用基于令牌传递或者基于时隙划分两种方法。但是无论是哪种方法,都需要对特定时间事件进行响应。因此必须引入时钟同步技术,来完成对全网的控制调度。[3]
时钟同步可以分为频率同步和时间同步。基于频分双工的无线系统(如WCDMA),要求节点间的频率同步。基于时分双工的无线系统(如CDMA2000、TD-SCDMA和WiMAX),要求严格的时间同步来保证小区间的平滑切换。对于时间同步,目前只能通过GPS(Global
同步以太网(Synchronous Ethernet,由ITU-T Q13/SG15制定的同步以太方案又称Sync-E)是一种采用以太网物理层传送时钟信号的技术,其标准由国际电联制定。该时钟信号由一个可追溯的外部精确时钟源提供。时钟源和基站之间通过以太网传送时钟信号的示意图如图1所示。其中EEC代表Synchronous Ethernet Equipment Clock(同步以太设备时钟)。在发送端主时钟(Master clock)将高精度时钟注入以太网的物理层(PHY)芯片,接收端的基站的PHY芯片可从数据码流中提取这个时钟,而不会损失精度,然后再根据该时钟信号校准自己的时钟。这就是同步以太网的基本原理。
同步以太设备可以设置成同步模式或者非同步模式,当设置为非同步模式时,它将不接收和发送同步信息,只有设置为同步模式,才会参与到整网同步的过程当中。不管是什么工作模式,都兼容IEEE802.3协议。
在以太网上传输时钟,仿照SDH机制,可以将以太PHY恢复出的时钟,送到时钟板上进行处理,然后通过时钟板将时钟送到各个单板,用这个时钟进行数据的发送。这样上游时钟与下游时钟就产生级连的关系,实现了在以太网络上时钟同步的目标。与传统的TDM/SDH网络不同,以太网没有带外通道来传输时钟信号,所以只能通过构造专用的SSM(Synchronous Status Message,同步状态信息)报文的方式通告下游设备。该报文最早由ITU-T定义在SDH网上,用于标示同步源的质量等级(Quality Level,QL)。SSM的传输是通过ESMC(Ethernet Synchronization Messaging Channel,以太同步消息通道)来进行的。该通道是一个单向传输通道,使用IEEE 802.3 Organization Specific Slow Protocol(OSSP)进行传输。OSSP是一个连接协议,ESMC帧不能在以太网节点透明传输。节点接收到一个ESMC帧之后传输就终止了,不能进行转发,而要创建一个新的ESMC帧再发送出去。
ESMC有两种消息类型,事件消息和信息消息。事件消息只有当时钟源的QL发生变化时才进行发送,携带有新的QL。信息消息每秒都在发送,携带的是时钟源的相关信息,包括源ID,从源到目前所在路由器的跳数等等。如果五秒内没有收到任何一个ESMC消息,则表示QL值失效。[5]
同步以太的优点是时钟同步质量接近SDH,完全满足IP RAN时钟指标,不受PSN网络影响,是最可靠的频率传送方式。但也有明显的局限性,如需要全网部署,不支持时间同步,而且存在兼容性问题。
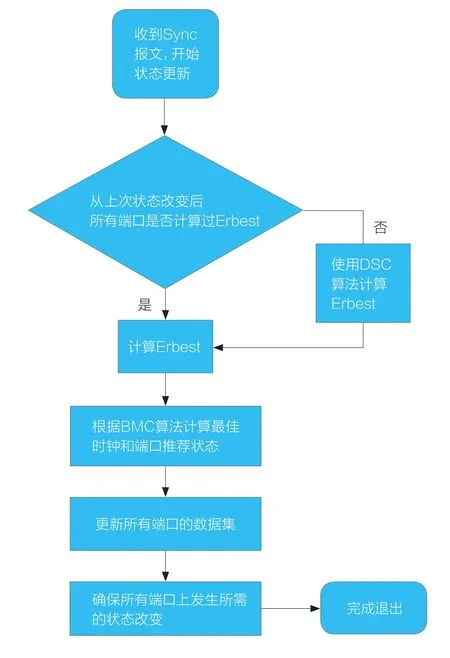
图3 1588v2时钟状态改变算法流程图
3.IP clock
IP clock是使用NTP(Network Time Protocol,网络时间协议)来进行时钟同步的一类产品的统称。每个时钟都可以作为转发器,把自己的时钟信号转发给其它计算机。它采用自组织的方式,分布式子网内的时间服务器可以经过有线或无线的方式同步子网内的逻辑时钟达到标准时间。
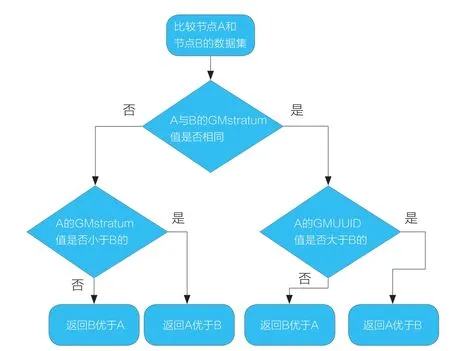
图4 数据集比较算法流程图
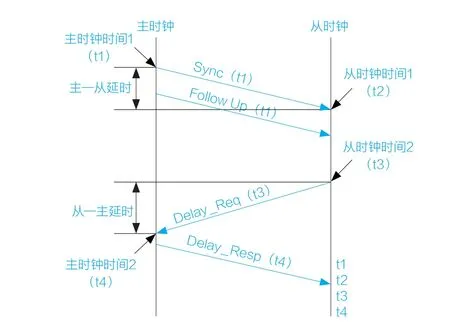
图5 主从时间同步机制
区别于其它类似服务,NTP提供了层(stratum)的概念,用于时钟的选择和精确的补偿措施用于自身的时钟频率误差校正。层的号码表示服务器的精确度,从0到15精确度逐步降低。NTP拓扑图如图2所示,其中第0层获得外部时钟源,通常是高精度原子钟、天文台、卫星。然后第1层从第0层获取时间,第2层从第1层获取时间,以此类推。NTP非常高效,在任意两个网络设备之间维持毫秒级的时间误差,仅需传输一个数据包。该数据包会包含NTP服务器到NTP终端用户之间的时间延迟,里面的时间延迟信息会根据当前网络的吞吐量通过统计学的算法进行调整。[6]
为了提供免费的时间同步服务,Adrian von Bidder成立了一个名为“NTP共享计划(NTP Pool Project)”志愿组织。该组织提供NTP服务器,并且联合了多个不同的时钟源设备,使得该计划成为一个成功的计划。该计划的主要内容是通过设置域名服务器(Domain Name Server,DNS),再根据地理位置划分不同的子域。当一个终端向NTP服务器发起请求,DNS服务器会向其提供本地NTP服务器的IP地址。DNS服务器通过轮听的方式,使得请求负载均匀地分布在各个本地NTP服务器。
现在市场上已经有许多成熟的IP clock产品,如Valcom和Bogen等等。它们可以使用IEEE802.3af协议进行供电或者使用电池。通过RJ-45接口接入以太网,兼容10M和100M基带信号传输以太网网络。[7]
IP clock的优点是部署简单,成本较低,缺点是其准确度较低,特别是当基站端处于低层,有时不能满足测量仪器和工业控制所需的准确度,而且和同步以太一样,不支持时间同步。
4.1588v2协议
由于NTP无法满足所需的准确度,2000年底网络精密时钟同步委员会成立,其后获得IEEE仪器和测量委员会美国标准技术研究所(NIST)的支持,该委员会于2002年底起草了获得IEEE标准委员会通过的IEEE 1588协议。IEEE 1588协议全称为“网络测量和控制系统的精密时钟同步协议标准”。与NTP只用软件进行时钟同步不同,IEEE 1588既使用软件,也同时使用软硬件结合,来获得更精确的时钟同步。由于IEEE 1588一开始也不支持时间同步,所以IEEE组织对1588进行了重新修订,并于2007年完成了版本2的修订,称为1588v2。IEEE1588协议借鉴了NTP技术,具有容易配置、快速收敛和节省带宽等特点。它的主要原理是通过一个同步信号周期性地对网络中的所有节点的时钟进行同步校正,可以使基于以太网的分布式系统达到精确同步,也可应用与任何组播网络中,完全可以满足IP RAN对时钟同步的要求。[8]
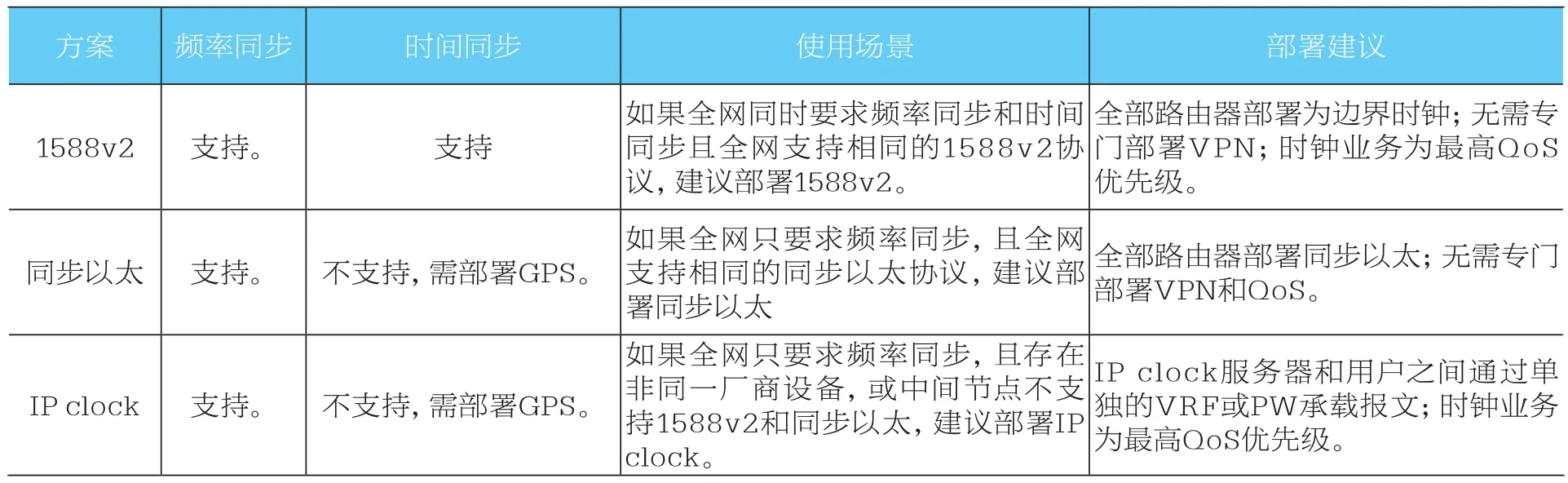
表1 不同时钟同步方案比较
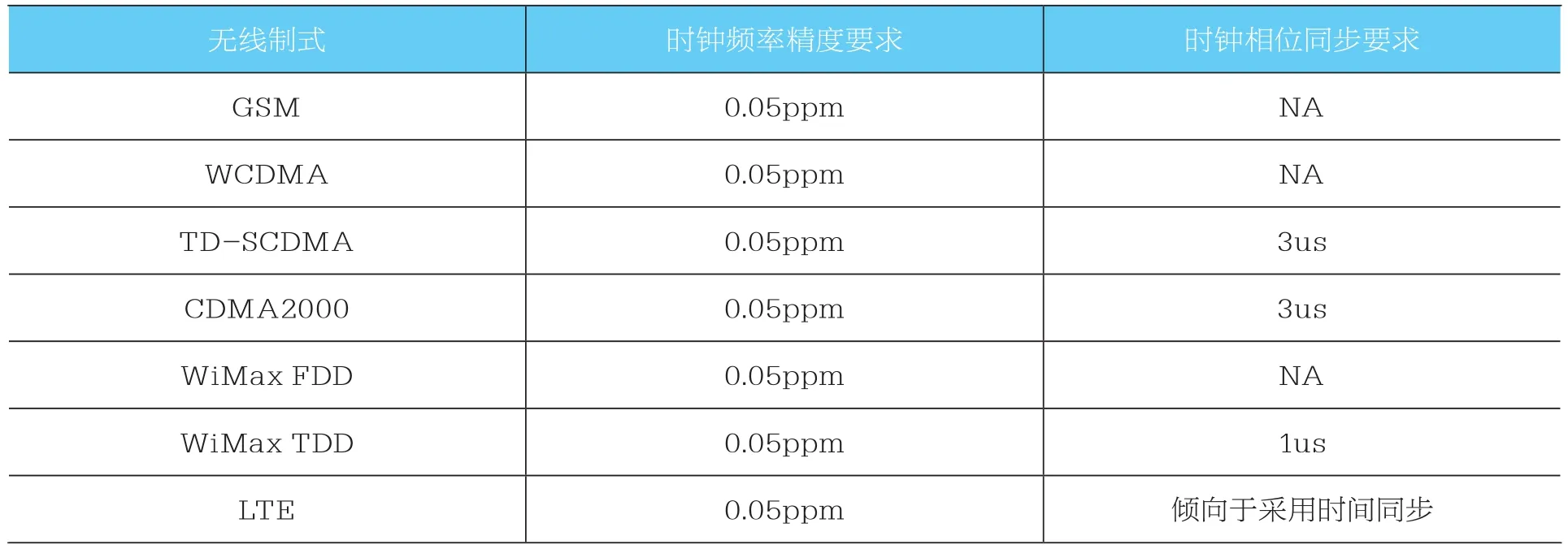
表2 不同无线制式对时钟同步的要求
IEEE 1588v2协议的关键技术点有三个:BMC(最佳主时钟)算法、主从同步原理、透明时钟(TC)模型。1588v2采用握手的方式,利用精确的时间戳完成频率和时间同步。
4.1 BMC算法
在IEEE 1588v2协议中,PTP时钟的端口状态被分为9种状态。BMC算法的目的分为两方面,从设备层面看就是确定当前端口处于什么状态,然后根据接收到的sync报文,改变端口状态。从网络层面看,BMC算法还能够比较两个时钟节点的数据集,从而找到超主时钟(Grandmaster Clock),确定各个时钟设备到达超主时钟设备的路径,避免环路。[9]相对应的,BMC算法可以分为两部分,分别为状态确定算法(State Decision(SD)algorithm)和数据集比较算法(Data Set Comparison(DSC)algorithm)。
4.1.1 状态确定算法
使用BMC算法的时钟状态改变算法可以分为以下三步:①比较各个端口收到的报文中的时钟优先级,取优先级最高的作为该端口的最优消息Erbest;②比较各个端口的Erbest的时钟优先级,取优先级最高的作为该节点的最优消息Ebest(对于普通时钟节点,因为只有一个端口,所以Ebest=Erbest);③每个端口根据自身的Erbest和该节点的Ebest和defaultsDS,通过BMC算法最终确定各个端口的主从状态,从而确定整个域的主从体系。[10]时钟状态改变算法流程图如下:
4.1.2 数据集比较算法
DSC算法的输入值可以是时钟节点的本地数据集,也可以是接收到的广播报文中包含的对等信息;输出值是两个时钟节点中精确度更高的那个,并作为超主时钟的候选时钟节点。DSC算法的算法流程图如下图所示。
4.2 主从同步机制
主从同步机制包括时间同步和频率同步两个部分。
4.2.1 主从时钟时间同步机制
时钟时间同步过程如下图所示[11]:
主时钟每两秒给从时钟发送Sync消息,Sync消息里面包含了时间戳t1。主时钟也可能有选择的发送Follow_up消息,其中包含有精确时间戳precision t1。从时钟记录Sync消息到达的时间t2,然后发送一个Delay_Req消息返回给主时钟。Delay_Req消息携带有一个时间戳t3。主时钟记录下Delay_Req消息到达的时间t4。然后再发送Delay_Resp消息给从时钟。从时钟根据t1、t2、t3、t4,就可以计算出主时钟到从时钟的延迟和偏差,从而进行校准。延迟(delay)和偏差(offset)的计算公式如下:
delay=((t2-t1)+(t4-t3))/2
offset=((t2-t1)-(t4-t3))/2
4.2.2 主从时钟频率同步机制


主从时钟频率同步可以分为以下三个步骤:①记录Sync消息出发时刻加上路径延时,即到达从端口的修正时刻,再计算各个从端口修正时刻的时间间隔;②从根据各个从端口的入口时间戳计算时间间隔;③根据两类时间间隔计算比例因子。
4.3 透明时钟模型
在1588v1协议中,有两类时钟,分别是普通时钟(Ordinary Clock,OC)和边界时钟(Boundary Clock,BC)。OC模型只能接收时钟,用于整网时钟源或时钟宿,不能同时作为始端和终端。BC模型相当于中继器,既可以恢复时钟,又可以作为时钟源往下游传递时钟。
1588v2协议比v1增加了透明时钟(Transparent Clock,TC),用于解决报文在中间节点驻留引起的延时问题。TC分为E2ETC(end-to-end)和P2PTC(peer-to-peer)两种模式。E2ETC只计算设备内部时延,对两端同步节点完全透明,链路延时由两端节点计算,推荐链形网络使用。P2PTC同时计算设备内部及链路时延,可以支持链路快速倒换,推荐MESH网络使用。[12]
1588v2的优势就在于它支持时间同步,而无需使用GPS,可以大大降低成本,运维更容易,减少安全隐患。下面给出以上三个时间同步方案的对比。
4.4 时间同步方案对比
下表列出了不同时钟同步方案的使用场景和在IP RAN方案中的部署建议。
下表列出了不同无线制式对频率和时间同步的要求:
综上所述,同步以太协议部署最简单,而IP clock的兼容性比较好,但是精度偏低,这两者都不支持时间同步,无法满足未来4G通信发展的要求。而1588v2可以同时支持频率同步和时间同步,无需通过GPS,将成为未来4G通信使用的时钟同步方案。
朱先飞 工程师,现任职于中国电信股份有限公司广东研究院,主要从事物联网通信、移动终端定位等研究
宛传东 高级工程师,现任职于中国电信股份有限公司广东研究院,主要从事物联网通信技术方案、测试方法等研究。
5. 结束语
同步以太、IP clock、IEEE 1588v2协议都是比较成熟的时钟同步方案,得到广泛的应用。在IP RAN方案中,根据使用的无线制式,以上三种时钟同步方案都满足时钟同步要求。本文详细介绍了三种时钟同步方案,并比较了三种方案的优缺点,对于IP RAN的实际部署有一定的指导作用。■
