基于单片机的超声波倒车雷达设计
2018-12-14汤传国
汤传国
基于单片机的超声波倒车雷达设计
汤传国
(聊城大学机械与汽车工程学院,山东 聊城 252000)
文章设计了一种基于单片机的超声波倒车雷达系统,以AT89C51型单片机作为控制核心,集距离测量、显示,方位显示和危险报警于一体,以提高驾驶者在倒车泊车时的安全性和舒适性。本设计采用Keil软件对系统程序进行调试,并采用Proteus对整个系统进行了仿真,仿真结果达到了预期的效果。
超声波;测距;单片机;倒车雷达
前言
近年来,随着驾驶人和机动车数量的急剧增长,行车路况复杂,驾驶员往往不能及时的了解车辆周边尤其是后方的环境,导致驾驶员操作不及时,造成很多事故[1]。本文设计了以AT89C51单片机为核心,利用超声波来进行测距,同时具有实现显示和报警功能的倒车雷达系统,大大提高了倒车泊车的安全性。
1 系统总体设计
本文设计了一种基于单片机的超声波倒车雷达系统,采用超声波脉冲回波法对距离进行测量,AT89C51单片机作为整个系统的控制单元,TCF40-16TRC超声波收发一体式传感器作为测距装置。系统主要包括测距部分、控制部分和显示报警部分。图1所示为系统的整体框架图。

图1 系统总体框架示意图
汽车泊车时挂倒档,整车ECU会产生倒车信号,单片机接收该信号后进入工作状态,产生脉冲电压信号,该信号经过四选一分时选通开关被发送到第一路(后左支路)测距电路,经过电路放大后驱动传感器发射超声波,同时单片机开始计时。超声波遇到障碍物后产生的反射回波被超声波接收传感器所接收,并将其转化为电信号,单片机收到信号后,响应该中断,系统会执行外部中断程序,停止先前的计时,控制器会得到超声波发射和回波之间的时间差,定时中断以后继续执行下一路。测距顺序依次为后左,后左中,后右中和后右。随后,控制器计算得到最小距离值,并将该值及方位传送给LCD。当该值小于所设定的安全距离时,单片机驱动蜂鸣器发出报警,同时AEB系统进入工作状态,以保证泊车安全。
2 系统硬件设计
AT89C51单片机是一种低功耗和高性能的八位芯片[2]。硬件电路主要包括单片机控制电路,超声波测距收发电路,回波电信号放大电路,LCD显示电路,报警电路,方位灯显示电路等。
2.1 超声波测距收发电路
超声波收发电路的功能主要有:增大驱动发射声波脉冲电压幅值,实现声波信号与电信号之间的转化;提高超声波有效发射距离。本系统选择CD4052型芯片用来分时选通四个支路的传感器。
2.2 回波电信号放大电路设计
放大电路选择CX20106A型芯片作为控制核心。图2中引脚1接CD4052芯片的Y端。该放大电路对回波电信号进行处理,最终产生并向单片机输出一个低电平信号[3]。该信号会向控制芯片申请中断,随即单片机发送计时停止指令,同时系统便开始对数据进行处理。

图2 超声波回波信号放大电路图
2.3 液晶显示系统的电路设计
本设计选择YBLCD1602LCD液晶显示器作为显示装置。图3中芯片P0的八个引脚端口分别与LCD的八个引脚相连接,传输指令和数据。P1.0、P1.1和P1.2引脚分别与LCD的三个端口相连接,对LCD的读写功能进行控制。
2.4 系统方位灯电路设计
图4所示为系统方位灯的电路图,当其中一个二极管点亮,表明该路传感器对应方位的障碍物距离车体的位置最近。这四个发光二极管分别与芯片的引脚相连,当芯片所对应引脚输出为低电平时,该引脚所对应的二极管被点亮。
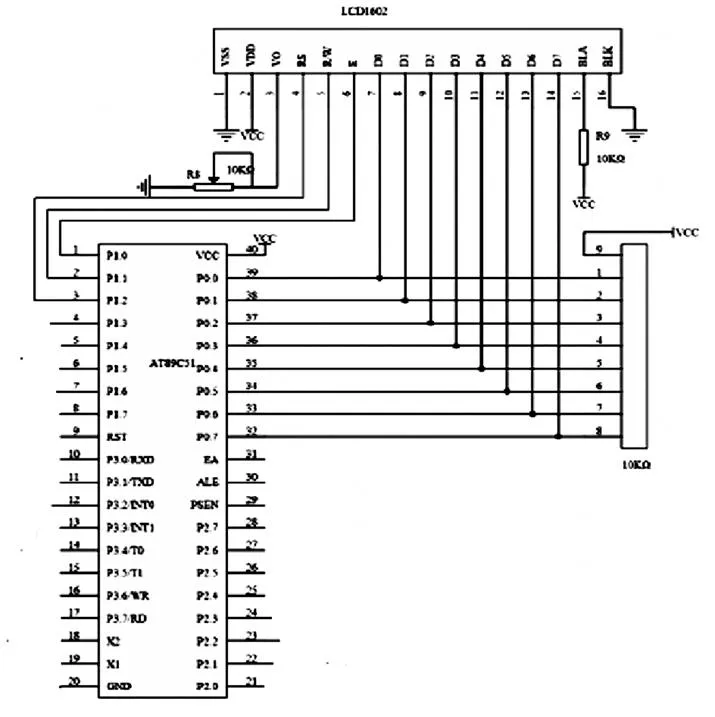
图3 系统LCD显示电路图
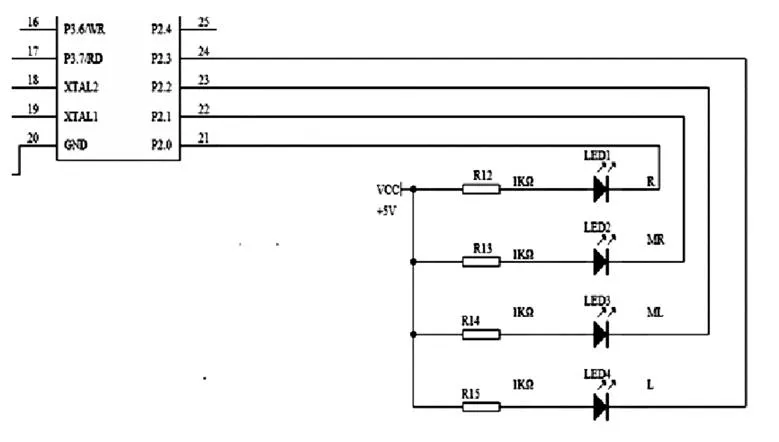
图4 系统方位灯电路图
2.5 系统报警电路设计
系统采用PB2130UP002A蜂鸣器作为声音报警装置,当障碍物与车体距离过近时,蜂鸣器发出声音以起到报警的作用[4]。由图5可知该电路是利用一个三级管来驱动,蜂鸣器电路与单片机的P3.7引脚相连接。
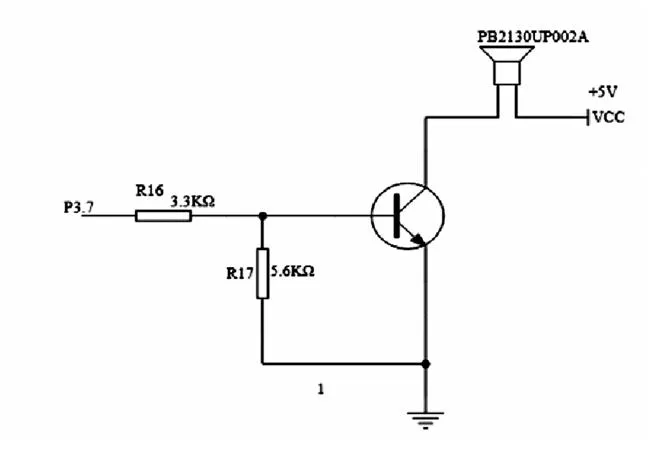
图5 系统报警电路图
3 系统软件设计
系统软件部分由运行主程序,超声波收发子程序,发射通道选通子程序,LCD显示子程序,报警子程序等组成。
3.1 软件主程序设计
图6所示为主程序流程框图,汽车挂入倒档时,系统进入工作状态。首先对每个缓冲单元清零,对液晶显示器进行初始化[5]。随后,系统开始检测是否有倒车信号传来,若有超声波测距支路便开始进入工作状态,反之继续等待。
设置定时器并赋初值,同时T1定时器开中断。单片机通过检测四路探测完毕的标志位来判断四路探测是否完毕,标志位为1则表示都已经完成,对数据进行处理,完成后通过LCD显示最小距离,同时报警模块判断是否需要报警,延迟大约0.5s后,系统又回到检测倒车信号处开始下一轮的循环。
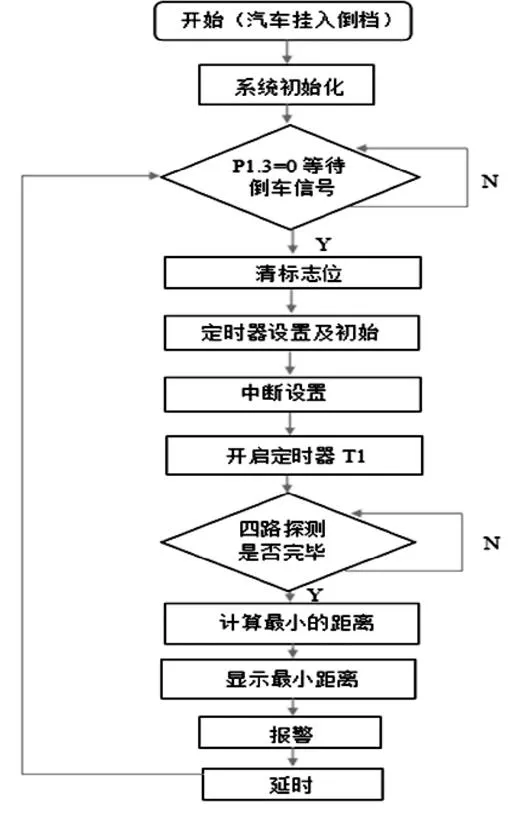
图6 系统主程序图
3.2 超声波收发子程序设计
单片机接收超声回波的信号,系统进入外部中断0程序[6]。此时,定时器T0首先停止计时,禁止外部中断0的中断,然后计数值保存在以40H为起始的单元中。随后,系统等待定时器T1所设定的40ms中断产生,一旦产生,便会继续进行下一支路的测距。
3.3 定时器T1中断程序设计
系统进入定时器T1中断程序,T1关闭,外部0中断被禁止,同时T1被重新赋初值。如果全部选通完毕且有四个计数值,系统会置标志位然后比较这四个值返回主程序。如果四通路还没有全部选通,系统会继续选通还没有被选通的通道,同时调用发射超声波的子程序,启动定时器T0和定时器T1,并允许定时器T1中断。
4 系统调试与仿真
本文使用Keil软件对程序进行调试,使用Proteus软件对电路进行仿真。图7中,示波器窗口可以看见有一串矩形波发出,脉冲个数为16个,与预期的数目相同。
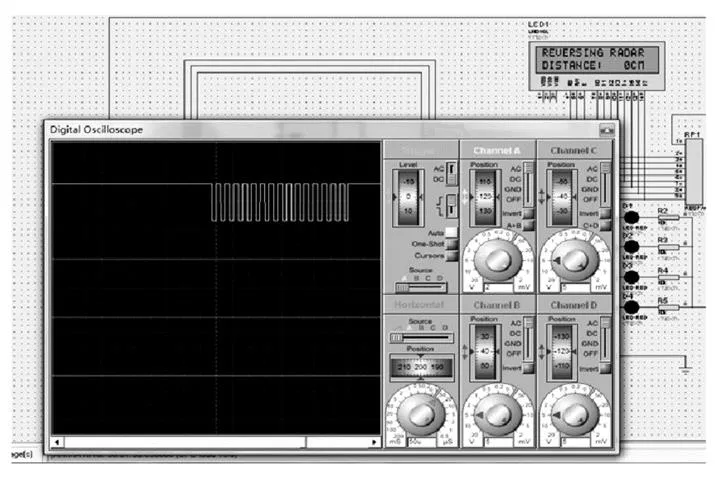
图7 联合仿真时示波器状态示意图
利用Keil软件对系统的程序进行了调试并采用Proteus专业仿真软件对整个系统进行了仿真以验证系统的正确性和稳定性。
5 结语
本文通过采用单片机控制和超声波测距,设计出一种结构简单、可靠性高的泊车雷达系统。利用超声波来进行测距,测量精度比较高,同时实现显示和报警的功能,完全满足驾驶员泊车的需求。
[1] 郭强.周云仙等.液晶显示手册[M].电子工业出版社,2003.
[2] 靳霖霖,曾迎生,宋金泽.自动泊车超声传感器系统设计[J].微计算机信息,2010(13).
[3] 刘同法,陈忠平,彭继卫,睦仁武.单片机外围接口电路与工程实践「M].北京:北京航空航天大学出版社,2009.
[4] 尹克,陈吉峰等.车载可视倒车装置的设计与实现[J].杭州电子科技大学学报.2007.
[5] 王秋爽,曾昭龙等.单片机开发基础与经典设计实例[M].北京:机械工业出版社,2008.
[6] 张红莲.基于单片机的超声波测距系统的设计[J].可编程控制器与工厂自动化,2008.
A ultrasonic reversing radar system’s design based on MCU
Tang Chuanguo
( College of Mechanical and Automotive Engineering, Liaocheng University, Shandong liaocheng 252000 )
This article designs a ultrasonic reversing radar system based on MCU. This system is based on AT89C51 Single-chip microcomputer as the control core. The system includes the follows modules: distance measurement module , control module and display and alarm module. This system can improve the driver’s safety performance and comfort performance when they reversing and parking. This design debugs the software programme of the system by keil software and the simulation by Proteus software. The simulation results achieved the expected results.
Ultrasonic; Ranging; MCU; Reversing radar
U462
A
1671-7988(2018)21-211-03
U462
A
1671-7988(2018)21-211-03
汤传国,就职于聊城大学机械与汽车工程学院,硕士研究生学历,助教,研究方向为车辆控制技术,新能源汽车技术。
10.16638/j.cnki.1671-7988.2018.21.071
