电动客车CAN总线数据分析及改进设计方案
2018-12-14崔庆虎冯汝广薛守飞
崔庆虎, 王 波, 张 刚, 冯汝广, 许 璇, 薛守飞
(中通客车控股股份有限公司, 山东 聊城 252000)
随着国家对电动客车的推广,电动客车保有量在我国迅速增加。在这个过程中也出现了很多共性的问题,其中电磁兼容问题尤为突出[1-3],导致CAN总线信号质量差。CAN总线作为电动客车的神经系统对电动客车至关重要,CAN总线信号质量的好坏直接影响到电动客车的安全性及可靠性[4]。
1 CAN总线故障的数据分析
根据笔者多年的工作经验,电动客车上CAN总线信号质量差一般表现为:
1) CAN网络通信故障,整车误报警或不报警。
2) CAN总线上某个控制器节点不在线或者无规律的间断掉线。
3) 高压掉电,控制器烧毁,或仪表盘显示滞后等。
造成以上问题的原因可分为3种,下面分别介绍。
1.1 总线上有接反的节点导致的故障
通过CANalyzer中的statistic模块或者其他能够查看总线上每秒错误帧数量的工具来查看总线上的每秒错误帧数量。如图1所示。
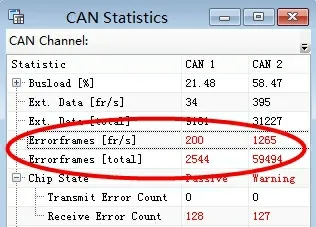
图1 CANalyzer中显示每秒错误帧的界面
如果每秒错误帧数量从一上电到运行过程中一直稳定在几百或者几十的范围内,波动不大,基本可以断定这不是干扰引起的,而是由于总线上不影响车辆正常行驶的模块CAN线接反造成的。用示波器捕捉的错误帧数量稳定的CAN总线CAN_H和CAN_L之间的波形如图2所示。
这种情况下只需将采集CAN报文设备的CAN_H和CAN_L反接,报文采集软件上就会显示出接反报文的ID,通过该ID便可以迅速定位接反的模块,这种情况下将接反模块的CAN_H和CAN_L交换,问题便能够解决。
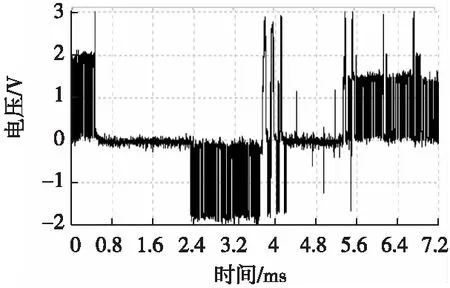
图2 CAN总线上有节点接反的波形
1.2 CAN总线收发器损坏导致的故障
如果每秒错误帧数量稳定在2 500帧以上,这就会有很多报文不能正确接收。这种情况大多数是由于总线上某个模块的CAN收发器出了问题,可以将总线上的模块一个一个地从总线上拔掉。如果出了问题的模块被拔掉,总线马上就能恢复正常。此时,出问题的模块由于是硬件问题,需要对其进行更换,更换为正常模块后,问题便可以解决。
以上2种情况虽然也造成了总线上面有错误帧,经常被误认为是电磁干扰引起的,但究其原因并不是由整车的电磁兼容环境不好造成的,下面着重介绍由电磁兼容引起的干扰情况。
1.3 电磁干扰引发的故障
如果每秒错误帧的波动范围很大,且上电之后车辆在静止时的错误帧要明显小于车辆在运行过程中的错误帧。这种情况一般就是由电磁干扰造成的。其原因为客车加速或者减速时,逆变产生巨大电流变化而产生强磁场干扰,通过动力线缆耦合到附近CAN总线。正常的CAN波形如图3所示,而有干扰的CAN波形如图4所示。对图4进行放大并串行译码,可得图5。
从图5中可知,由于脉冲干扰导致18FF22F3这一帧报文连续发了3次才发送成功。这不仅增加了CAN线的负担,而且也使通讯时间延迟,造成很多不可控的因素。
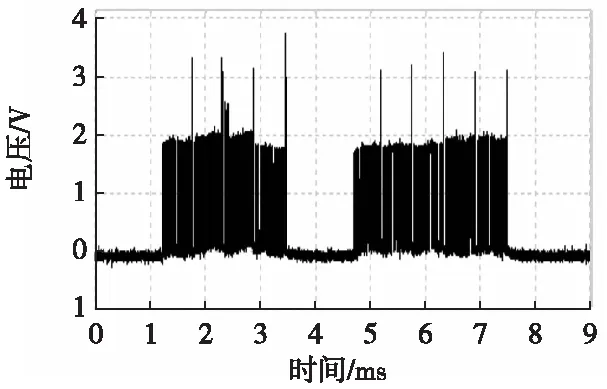
图3 正常CAN总线CAN_H与CAN_L之间的波形
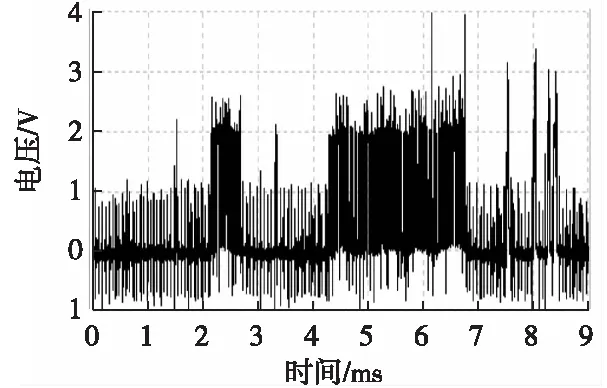
图4 有干扰的CAN总线CAN_H与CAN_L之间的波形

图5 由干扰引起的CAN总线错误帧的波形图
通过进一步放大有干扰的波形图可以看到,本来是一个隐性位的电平,由于一个脉冲干扰,被拉高成显性位。CAN总线的位错误检测机制检测到发送的为隐性位但总线状态为显性,导致CAN线发动了一个主动错误。这就是由整车电磁环境的不友好造成的。
针对这种情况,可以根据干扰脉冲的周期算出它的频率,根据干扰的频率基本上可以判断干扰源是来自电机控制器还是集成电源。一般情况下,电动客车上的电机控制器干扰频率在10 kHz左右,而集成电源造成的干扰频率较高,一般在40 kHz左右。根据确定的干扰源,可以有针对性地对其进行一些滤波处理,如加磁环或者一些滤波电容等[5-7]。
如果干扰源不好整改,可以从被干扰的CAN总线上进行优化。一般情况下,CAN总线受干扰较严重都是由于屏蔽线搭铁不良或者某个模块的电源负极线过长。针对后一种情况,只要在靠近模块的地方就近搭铁就好了,原因为在没有干扰的情况下,可以把地线看成是根导线;但是在有干扰的环境中,还要考虑它的等效电感,如果干扰太强以及导线走线过长,就会感应出很大的电动势,而这个地线电压又是CAN收发器的参考电压,如果它不稳定了,总线的通讯势必受到影响。
通过以上几步基本可以排除整车大部分CAN总线的故障。
2 提升CAN总线质量的改进设计方案
电动客车中配置的电子电器设备由于种类不同、空间安放位置各异,因此其电磁特性各不相同,使得电动客车内部空间的电磁场分布相对复杂。复杂的电磁环境很容易对CAN总线的信号形成串扰,这种串扰在整车上的排查非常困难[8]。因此只有在前期的设计中做好相应的防护工作,才能从根本上提升CAN总线的通讯质量及整车的安全性及可靠性。提升CAN总线信号质量的主要设计改进方案如下:
1) 对于高、低压线束,尤其是高压线与低压CAN信号通讯线束,必须分开排布,避免线缆交叉布置造成的干扰。高低压排布应保证200 mm以上的空间距离。如果高压线束与低压线束有交叉,尽量使他们呈90°布置。
2) 电机高压线缆应独立于其他线束走线,与其他线束最小距离为500 mm。同时应避免电机线束与其他线束长距离平行走线,这样才能减少变频器输出电压快速变化而产生的电磁串扰[9]。
3) 高压线束均需要带屏蔽层,高压线束连接器也要求带屏蔽功能,或者通过其他搭接方式能够实现高压线束屏蔽层搭铁,屏蔽网端头部分最好采用360°环接措施[10-11]。尤其是电机控制器处的高压线一定要保证可靠的屏蔽搭铁,因为电机控制器是主要的干扰源,如果此处屏蔽搭铁效果不好,很容易将干扰引入CAN总线,降低通讯质量。
4) 系统屏蔽效能不但与高压线束、高压部件壳体本身的屏蔽性能有关,还与两者在屏蔽端的处理工艺有关。为保证屏蔽连续性,屏蔽层连接电阻R的阻值应小于100 mΩ。
5) 对于内部带有晶振的控制模块,如仪表、整车控制器、电机控制器、BMS、DC/DC等,其电源线设计尽量缩短,对于电流较小的模块的电源线可以采用带有屏蔽层的二芯导线。
6) 对于大功率感性负载,如刮水器电机、ATS风扇及其水泵、暖风风机等,其电源线在条件允许的情况下可以分离出来单独设计。
7) 对于无线设备,如收音机、远程监控终端、车载调度终端等,其收发天线尽量单独走线,或与CAN通讯线保持100 mm以上的距离。
3 结束语
某厂样车通过运用本文介绍的提升CAN总线质量的改进设计方案后,其电磁兼容性得到大幅改善,CAN总线信号质量明显提升。并且根据CAN总线数据分析锁定干扰方法的指导,笔者在电动客车下线调试以及市场电动客车问题处理时,也能够得以快速解决与通讯和干扰相关的问题。
