基于结构分析法的汽车ABS故障诊断和识别系统设计与校验∗
2018-12-12姚志刚QadeerAhmed陈无畏
陈 奇,姚志刚,Qadeer Ahmed,陈无畏,樊 浩
(1.合肥工业大学机械工程学院,合肥 230009; 2.美国俄亥俄州立大学汽车研究中心,哥伦布 43212;3.合肥工业大学车辆与交通工程学院,合肥 230009)
前言
随着汽车复杂性的增加,汽车各个系统的状态监测成为其不可或缺的组成部分,而汽车故障诊断 技术在汽车系统状态监测中扮演着重要的角色。当前,因汽车系统的复杂性导致各个子系统故障识别存在着诸多难点,使通常使用的基于规则与经验的监测系统较难开发、验证与维护[1]。目前普遍采用的汽车故障诊断技术是基于故障诊断代码(diagnostic troubleshooting codes,DTCs)的诊断策略,依据汽车自带故障检测系统,基于观测到的故障诊断代码,实现故障的排除。此种方法仅依靠静态数据实现对系统故障的诊断,对复杂故障的动态行为则存在诊断盲区。
防抱死制动系统(anti-lock braking system,ABS)是汽车增强主动安全性的重要部件,该系统在汽车制动时,控制制动器制动力的大小,从而使车轮不被抱死,并处于最佳滑移率的状态,以保证车轮与地面的附着力保持在最大值。因此,监测ABS的运行状态,实现ABS的故障诊断,对于增强汽车主动安全、提高ABS运行稳定性等大有裨益。在国内已有的ABS故障诊断方面,那文波等[2]提出了一种基于模糊均值聚类的神经网络法对ABS轮速传感器故障进行了在线诊断;陈宗好等[3]阐述了基于多传感器信息融合技术的故障诊断方法及在ABS系统上的应用,该方法依靠大量故障特征信息,实现成本较高;此外,薛金梅和王立亮[4-5]应用故障诊断代码(DTCs),实现ABS的故障诊断与检修,但该方法依靠静态数据,很难实现ABS系统运行状态的实时监测。而在国外,基于模型的故障诊断技术已成功应用于ABS上,如PISU等[6]提出了一种基于模型的汽车主动制动系统故障诊断与隔离方案,验证了基于模型的故障诊断方法在监测车辆状态上的可行性;LUO等[1,7]应用基于模型的故障诊断方法,引入ABS动态数据,通过状态观测器观测ABS故障残差值,实现ABS系统的故障诊断;BÖRNER等[8]基于数学模型方法,针对制动系统中液压单元出现的故障,建立了液压系统的故障残差,实现了液压系统空气混入与油液故障的检测与诊断;STRUSS Peter等[9]应用基于模型的故障诊断方法建立了液压制动试验平台,验证了采用基于模型的故障诊断方法以动态检测 ABS微小故障的可行性;YU Guizhen等[10]依托电磁阀数学模型,对ABS电磁阀故障模型成功进行了故障诊断研究。
由上可知,现有ABS故障诊断系统通常无法进行实时动态监测,且缺乏诊断能力预分析和优化设计等功能。为此,本文中引入一种基于模型的新型故障诊断方法——结构分析法(structural analysis,SA),该方法不依赖于系统具体的参数值,仅须提供系统故障结构模型,即能动态、精确而快速地进行复杂系统中的故障诊断与隔离,因此适合于ABS的瞬态与微小故障诊断。在基于结构分析法的故障诊断研究方面:RIZZONI等[11]利用结构分析法研究了AMT的最佳传感器配置方案,实现了AMT的最优故障诊断与隔离;ZHANG等[12]成功将结构分析法应用于电动汽车的故障诊断;此后,CHEN等[13-14]利用SA进行了AMT换挡执行机构的残差设计,进而成功实现了AMT换挡执行机构故障的诊断与隔离。
为实现对ABS系统关键故障的检测与隔离,并进行ABS故障诊断系统的设计。本文中引入基于模型的故障诊断理论——结构分析法,首先通过分析ABS中存在的关键故障,结合ABS系统模型,建立ABS系统的关键故障数学模型;进而分别利用结构分析法中的DM(dulmage-mendelsohn)分解技术与故障隔离矩阵(fault isolability matrix,FIM),分析ABS故障模型的故障可检测性(fault detectability,FD)与故障可隔离性(fault isolability,FI);并针对初始故障模型故障可检测性与可隔离性的分析结果,进行ABS故障诊断最优传感器配置的探究;同时利用结构最小型超定方程集(minimal structurally overdetermined sets,MSO sets),设计出对应MSO集的序列残差,实现FDI系统设计;通过在MATLAB/Simulink中对FDI系统进行故障设置与故障诊断的仿真;最后对比传统故障诊断结果与结构分析法的诊断结果,验证基于结构分析法的ABS故障诊断方法的可行性。
1 ABS关键故障分析
1.1 ABS简介
ABS根据各车轮角速度信号,计算车速、车轮角减速度和车轮滑移率,依据这些信息,在车轮趋向抱死时,控制制动压力调节器减小制动力,并使车轮角减速度或滑移率在一定范围时保持制动力,车轮转速升高后恢复制动力。ABS系统主要由电子控制单元、轮速传感器和制动压力调节器3部分组成,如图1所示。
1.2 ABS关键故障
根据相关文献[15-17],ABS系统的主要关键故障可分为因电子控制单元故障导致的滑移率运算器故障fS和位于制动压力调节器中的电磁阀漏液故障fKf。通常fS为信号消失类故障,fKf为增益(消减)类故障。
2 ABS故障模型建立
以1/4车辆模型为基础,则单个车轮纵向摩擦力为

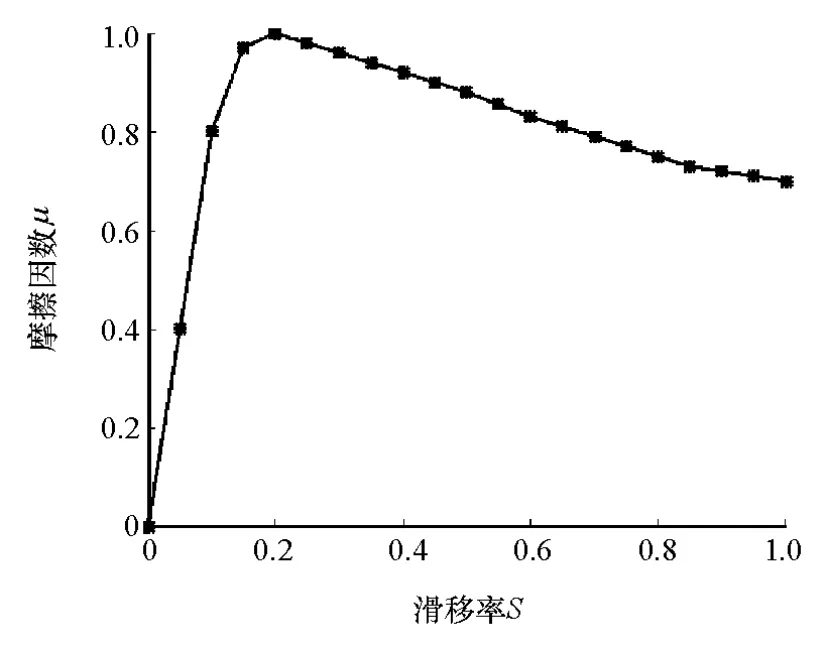
图2 轮胎特性曲线图
2.1 车轮实际角速度ωω
单个车轮摩擦力矩为

式中:Ff为车轮纵向摩擦力;Rr为车轮半径。
制动力矩Tb为

式中:Kf为制动系数,其值取决于制动器活塞面积;Fb为制动力,具体为

式中:TB为时间常数,设为0.01。
1/4车辆模型的总力矩为

根据车轮运动方程,可求出车轮实际角速度ωω,有

2.2 车轮理论角速度ωv
车轮理论角速度为

式中:vv为车辆纵向线速度;Rr为轮胎半径。
车轮通过车轮纵向摩擦力Ff驱动车轮转动,有

式中:Ff为车轮纵向摩擦力;m为1/4汽车质量;ω·v为车轮理论角加速度。
2.3 滑移率S
滑移率是指在车轮运动中,滑动成分所占的比例,具体为

结合以上对ABS系统的建模分析,并引入1.2节中“ABS关键故障”,即可得到ABS故障模型方程为

式中:fKf为电磁阀漏液故障;fS为滑移率运算故障;e1,e2,e3,e4,e5分别代表方程 1、方程 2、方程 3、方程4和方程5,ei表示第i个方程,下同;其余变量的含义、数值与单位如表1所列。

表1 ABS模型参数说明和取值一览
由系统模型和表1所列的变量与参数数值,利用MATLAB/Simulink工具,建立ABS结构模型,在无故障的情况下,ABS工作后实际与理论角速度和滑移率随时间的变化分别如图3和图4所示。

图3 车轮实际和理论角速度曲线图
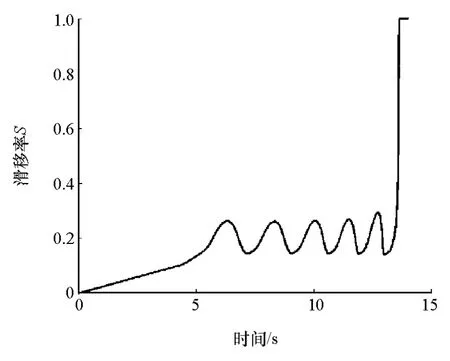
图4 滑移率曲线图
3 基于结构分析法的ABS系统故障可检测性和可隔离性分析
故障诊断包含故障的可检测性和可隔离性两部分,在系统发生故障的情况下,只有当各故障均满足可检测性和可隔离性时,才能确定系统发生故障的原因。因此,在设计故障诊断和识别系统时,须进行故障可检测性和可隔离性分析。依据结构分析法具有直观、可视化的特点,本节主要利用结构分析法(SA),并结合所建立的ABS故障模型(式(11)),实现系统结构表征(structural representation,SR),进行ABS的故障可检测性和可隔离性分析,并研究ABS具有最优化故障诊断能力的传感器配置。
3.1 系统结构表征图(SR)
结构表征图(SR)是一种能够表达系统结构的二分图[18]。根据式(11)获得的ABS故障模型,将各方程中的变量划分为未知变量{Ff;ωω;ωv;T;S}、已知变量{Kf}和故障变量{fKf;fS},忽视方程中的具体数学关系和常量,利用关联矩阵的表现形式,从而将ABS所有变量与方程形成一一对应的关系。ABS初始故障模型的结构表征图如图5所示,其中符号“×”表示关联矩阵符号所在行含有符号所在列的变量。
3.2 ABS故障可检测性(FD)分析
根据文献[19],DM分解方法将系统模型分成3个不同的部分:结构欠定部分M-、结构正定部分M0和结构超定部分M+,其中M-,M0和M+分别对应于未知变量数少于、等于和多于故障变量数的方程。故障可检测性(FD)是指当系统中有故障发生时,能否从系统中检测出所发生的故障。其定义为即含故障变量的方程ef位于结构超定部分M+。依据可视化图形判断故障变量是否位于结构超定部分M+(如图6所示),若是,则该故障可检测。


图5 ABS初始故障模型结构表征图

图6 DM分解示意图
结合ABS系统故障模型,利用MATLAB编程,进行ABS初始故障模型DM分解,如图7所示。根据图6的DM分解示意和图7的ABS故障变量FD分析结果可得:系统自身所设故障均不可检测,因故障变量均未处于结构超定部分M+。

图7 防抱死系统初始故障模型FD结果
3.3 ABS故障可隔离性(FI)分析
故障可隔离性(FI)的含义为:当系统发生故障时,该故障能从其它故障中隔离和定位,这意味着在可检测的情况下,能精确定位故障源。用公式表达为

式中:efi和efj分别为含有故障fi和故障fj的方程;M为ABS模型;(M/efj)+为去除含故障fj的结构超定方程。
根据FI定义,可得到故障隔离矩阵(FIM),它能直观地反映出各故障的可隔离性,其在FIM中表现为故障变量只与自身相关,而与其它故障变量不相关。图8给出了ABS初始故障模型故障可隔离性矩阵(FIM),由故障可隔离性定义知:ABS初始故障模型中所含的两个故障变量均不可隔离。
3.4 ABS故障诊断系统传感器配置和优化
为实现ABS中所有故障均可检测和可隔离,一种有效方法是对ABS增加传感器,本节将讨论系统传感器的配置方案和对系统故障诊断结果(FD和FI)的影响,并进行传感器配置的优化,实现最佳故障诊断能力。
根据ABS结构模型,所增加的传感器需对未知变量进行检测。考虑到传感器配置的可行性和经济性,在此系统上,拟增加车速传感器(yωv)和转矩传感器(yT)两种传感器,并以传感器配置评价因子(FD和FI结果)为配置方案依据,评估传感器配置方案优劣性。
以添加两种传感器为预设配置,则有3种传感器配置方案:方案1为仅增加车速传感器;方案2为仅增加转矩传感器;方案3则是同时增加车速和转矩传感器。
3.4.1 3种传感器配置方案的故障可检测性分析
在结构分析法的故障诊断中,考虑到每增加一种传感器,由于传感器本身可能存在故障,因此需对系统结构模型增加相应传感器故障方程,设车速传感器的故障fωv为增益类故障变量,而转矩传感器的故障fT为偏差类故障变量。
则配置车速传感器(yωv),即在ABS初始故障模型(式(11))的基础上增加方程e6:

配置转矩传感器(yT),即在ABS初始故障模型的基础上增加方程e7:

同时配置车速传感器(yωv)和转矩传感器(yT)的ABS初始故障模型需增加以下方程:

以第1种方案为例,即仅增加车速传感器,结合式(14)和式(11),得到其故障模型为

同理可得第2种方案和第3种方案的系统故障模型。限于篇幅,在此省略。
在获得了3种方案的系统故障模型后,利用SA方法中的DM分解技术,即可得到3种配置方案的故障可检测性结果,如图9所示。显然,3种传感器配置方案的所有故障均可检测。

图9 传感器配置的3种方案FD结果
3.4.2 3种传感器配置方案的故障可隔离性分析
利用SA方法中的FI进行ABS故障可隔离性分析,得到3种传感器配置方案的故障可隔离性矩阵(FIM)结果,如图10所示。显然,方案1和方案2所有故障不可隔离,方案3所有故障均可隔离。
3.4.3 传感器配置方案的优化分析
由以上分析可知,单独增加车速传感器或增加转矩传感器的配置方案,虽能保证所有故障可检测,但均不能实现所有故障可隔离;而同时增加车轮角速度和转矩两种传感器的配置方案,不仅可使所有故障可检测,且能实现所有故障可隔离。因此,在进行ABS的故障诊断系统设计中,应同时增加这两种传感器,达到最优的故障诊断能力。
3.4.4 ABS系统结构最小型超定方程集(MSO sets)
由文献[20]可知,利用结构最小型超定方程集(MSO sets)获取ABS各参数变量,可生成ABS系统模型的序列残差,实现FDI系统设计。
根据文献[21]中对MSO集的求解策略,可获得ABS的MSO集,如表2所示。其中,符号“√”表示故障可检测,符号“×”表示故障不可检测。由表2可知,故障模型具有4组 MSO集(T1~T4),每个MSO集所包含的方程可用于产生一个残差,因此共有4个残差用于FDI系统设计。

图10 传感器配置的3种方案FI结果

表2 具有最优化故障诊断能力的ABS故障模型MSO集
4 基于结构分析法的ABS的FDI模型仿真与校验
本节在上述获得的具有最优故障诊断能力的防抱死系统故障模型和4组最小型超定方程集(MSO sets)的基础上,设计对应的4个残差;并在MATLAB/Simulink中建立ABS的FDI仿真模型,通过设定人为故障,对该FDI系统进行校验。
4.1 ABS的残差设计
根据结构分析法(SA)理论,每组MSO集可产生1个残差,因此可产生4个残差,用于ABS的故障诊断。
4.1.1 残差R1
由表2可知,方程集 MSO1由5个方程{e2,e3,e4,e5,e6}组成,通过合并和整理,5个方程可变成如下4个方程组:

利用方程e3即可产生残差R1,结果为

4.1.2 残差R2
由表2可知,方程集 MSO2由5个方程{e2,e3,e4,e5,e6}组成,通过整理后MSO2可由如下4个方程组成:

利用状态变量yωv产生残差R2,具体为

4.1.3 残差R3
同理,残差R3的生成选用最小型超定方程集MSO3,利用状态变量S产生R3:

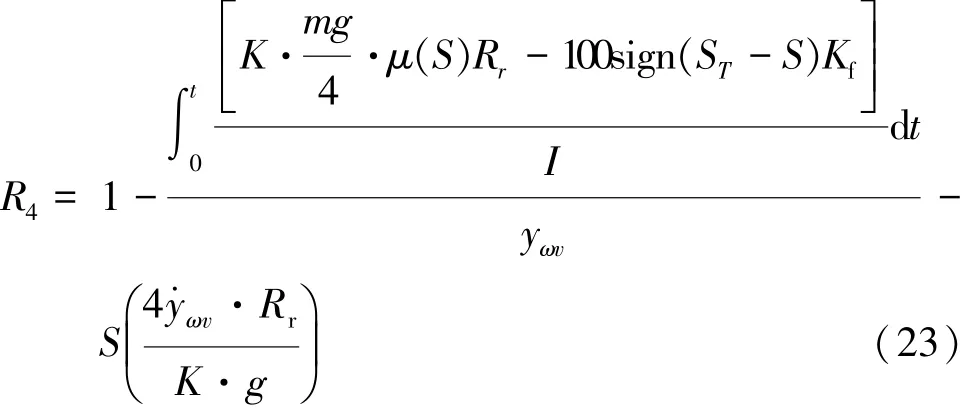
4.1.4 残差R4
同上,利用估计量与观测量的差值,生成残差R4:
4.2 ABS的FDI设计与校验
为了验证上述4个残差在ABS中对故障的实际检测情况,设计FDI系统结构原理,如图11所示。
FDI系统的校验过程为:先假定ABS系统中故障的类型和故障发生时间(如表3所列),并结合所设计的FDI系统,利用MATLAB/Simulink进行故障仿真,获得4个残差对故障的检测结果;根据文献[22]的结论,本文中也设定固定值作为残差阈值,评估4个残差对故障的可检测性,从而判断所设定故障是否发生。
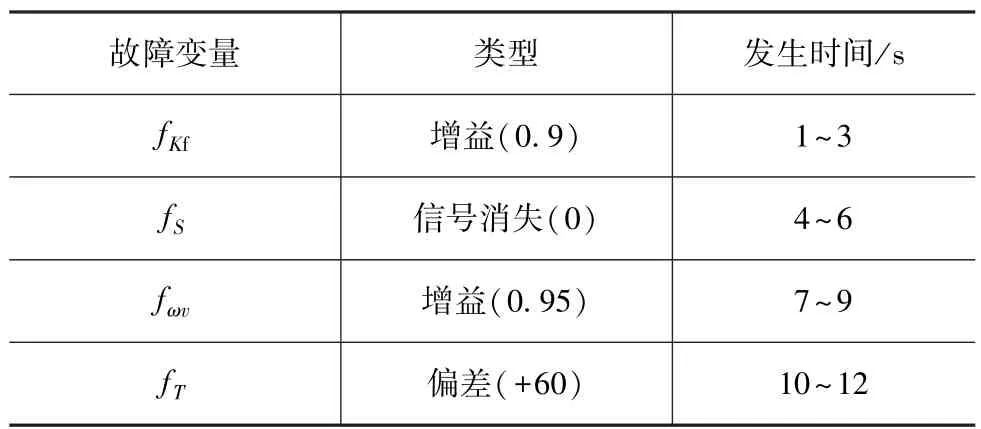
表3 故障类型及设定时间
4.2.1 残差R1故障诊断结果
由图12可见,残差 R1在 4~6s,7~9s和 10~12s内分别可检测 fS,fωv和 fT,在 1~3s不可检测故障fKf。

图12 残差R1故障诊断结果
4.2.2 残差R2故障诊断结果
由图13可见,残差 R2在1~3s,7~9s和 10~12s内分别可检测 fKf,fωv和 fT,在 4~6s内不可检测故障fS。
4.2.3 残差R3故障诊断结果
由图14 可见,残差 R3在1~3s,4~6s,10~12s内分别可检测 fKf,fS和 fT,在 7~9s不可检测故障 fωv。
4.2.4 残差R4故障诊断结果
由图15可见,残差R4在1~3s,4~6s和7~9s内分别可检测 fKf,fS和 fωv,在 10~12s内不可检测故障fT。
4.3 4组残差故障诊断结果汇总
将上述4组残差的检测结果汇总,如表4所示,其中符号“√”表示故障可检测,符号“×”表示故障不可检测。

图13 残差R2故障诊断结果

图14 残差R3故障诊断结果
对比表4与表2可知,FDI系统故障诊断结果与SA方法的理论分析结论一致,证明了基于SA故障诊断理论的ABS FDI设计的正确性。

图15 残差R4故障诊断结果
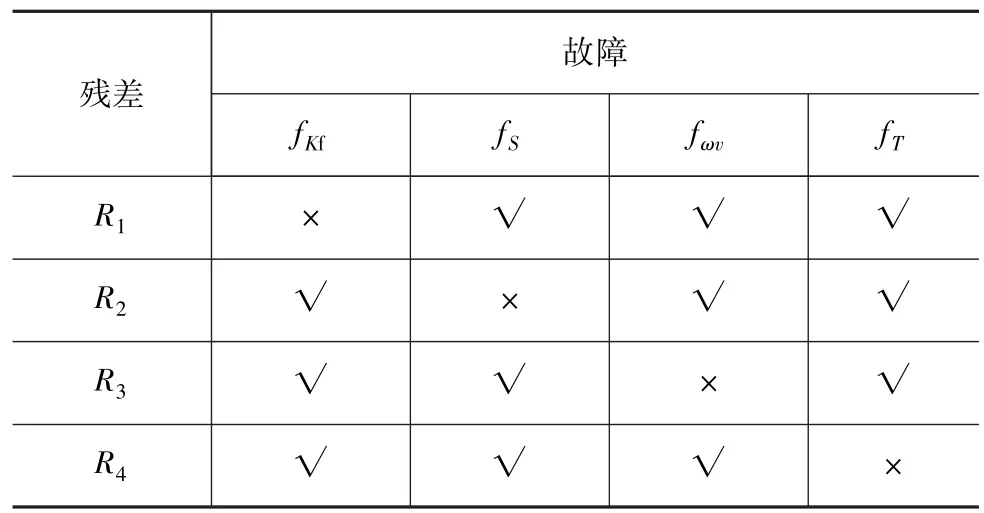
表4 各组残差故障检测结果
5 结论
(1)基于ABS结构模型和系统关键故障,建立了ABS初始故障模型;利用结构分析法的故障诊断理论,进行系统结构表征(SR)、故障可检测性分析(FD)、故障可隔离性分析(FI),得出在ABS初始系统模型中,滑移率运算故障fS和电磁阀漏液故障fKf均不可检测,且不能隔离。
(2)基于结构分析法的故障检测与故障隔离理论,综合考量传感器配置可行性,进行了ABS故障诊断系统传感器配置和优化;得出在配置车速传感器和转矩传感器后,ABS中所有的4个关键故障(滑移率运算故障fS,电磁阀漏液故障fKf,车速传感器故障fωv和转矩传感器故障fT)均可检测,且能隔离。
(3)利用结构最小型超定方程集(MSO sets),生成了4组残差,完成 FDI系统设计,并在 MATLAB/Simulink中建立了ABS的FDI仿真模型;通过设定4个关键故障的类型与发生时间和固定的阈值,对该FDI系统进行校验。结果显示:FDI系统能检测出所有的4个故障,且能完全隔离;其仿真结论与理论分析结果一致,验证了基于结构分析法的故障诊断系统可应用于汽车ABS中,实现ABS关键故障的诊断。
