基于ISO17387 LCDAS并线辅助系统试验研究
2018-12-11张鹏程吴波勇汪祖国王晓友李祥
张鹏程 吴波勇 汪祖国 王晓友 李祥


摘要:针对ISO 17387标准,分析关于LCDAS系统的逻辑状态和检测内容,根据标准要求制订出试验方案,通过实车道路测试,验证了标准检测的可行性,并总结出适用于ADAS项目试验的实践经验和注意事项,对智能汽车的试验具有指导意义。
关键词:LCDAS;ADAS;智能交通
中图分类号:U467.1
文献识别码:A 文章编号:1005-2550( 2018) 02-0051-05
1 前言
近年来,以先进驾驶辅助系统( AdvancedDriver Assistance Systems,简称ADAS)为代表的智能交通和智能汽车成为汽车行业发展的热点。在长期技术积累的基础上,国际各大汽车及零部件制造商纷纷推出各种独具特色的ADAS系统,这些技术成果显著改善了汽车的主动安全性能,能够有效的避免各种常见的交通事故或者降低其破坏程度,汽车并线辅助系统(Lane Change DecisionAid Systems,简称LCDAS)就是其中的一种先进驾驶辅助系统。
由于后视镜本身存在视线盲区,如图1所示,以至驾驶员无法及时、准确地获知视线盲区内车辆的动向,因此,车辆并线刮蹭或碰撞便成为一种常见的交通事故。汽车并线辅助系统也称盲区监测系统,它通过车载传感器监测后方来车,在左右两个后视镜内或者其他地方提醒驾驶员后方安全范围内有无来车,从而消除视线盲区,提高行车安全,国际上已制订出标准IS017387。
2 ISO17387标准介绍
ISO 17387对后视镜视线盲区进行标准化研究,并给出了左侧临近区域、右侧临近区域、左后方区域、右后方区域的尺寸定义,见图2。标准根据LCDAS的覆盖范围,分为盲点警告(Blindspot warning)、车辆靠近警告(Closing vehiclewarning)、变道警告(Lane change warning)三种类型进行检测,三者之间的关系见表1。
2.1 关于LCDAS的功能要求
作为一种先进驾驶辅助系统,LCDAS的运行状态分为激活状态和非激活状态两种,当处于LCDAS激活状态时,又根据实际交通环境对LCDAS逻辑条件判断的符合情况分为不警告、1级警告、2级警告或更高级警告等多种工作阶段,见示图3。
2.2盲点警告
在ISO 17387中,具备LCDAS功能的试验车辆称为主车(Subject Vehicle,简称SV),用于模拟被探测目标的车辆称为目标车(Target Vehicle,简称TV),标准要求按照4种工况对LCDAS进行功能检测:
①目标车纵向超越主车,超车时要求目标车进入主车的视线盲区并最终驶出;
②主车纵向超越目标车,超车时要求目标车落入主车的视线盲区并最终脱离;
③增加两车之间的横向距离,在保证目标车不进入主车的视线盲区的前提下,重复①和②的程序测试;
④目标车以规定的横向相对速度横向进入主车的视野盲区。
标准对盲点警告的具体规范可参照表2。盲点警告属于Ⅰ类型LCDAS,Ⅱ、Ⅲ类型的测试方法与之类似,仅在测试细节方面更加详细,具体可参照该标准中的5.4、5.5条款。
3试验方案设计
近年来国内外都在无人驾驶领域进行了广泛的测评实践,如美国的DARPA挑战赛、我国的“智能车未来挑战”赛等,各方一致认为:为了客观充分的评价测试车辆的智能等级和认知能力,对车辆的测试更应该获取车辆的内部过程数据和中间结果,而这也是行业所关注的功能检测问题。
根據标准条款5.4.2,要求测试设备必须是完全独立于LCDAS系统的测试设备,能够测量主车和目标车的时间、速度、距离、轨迹等参数并满足相当的测试精度要求。通过相关测试规范的解读,可知如何实现测试过程的实时性和有效性是该项先进驾驶辅助系统的法规可操作性的关键环节。
为了实现对LCDAS系统的功能检测,需要综合运用无线通讯、卫星通讯、影像识别、GPS/惯性导航组合定位等多学科的联合数据分析技术,利用多传感器信息的冗余性和互补性来提高测试精度和扩大测试变量种类对本项先进驾驶辅助系统的检测具有重要意义,能够保证轨迹的测量精度达到厘米级,满足标准条款5.4.2中规定的0.1m的精度要求。
从本质上看,LCDAS的功能就是对试验车辆视线盲区的动态监测,在车辆运动过程中,视线盲区是随着试验车辆一起运动的,因此需要在测试轨迹中找到能对视线盲区持续跟踪的解决办法,就是在试验车辆上建立局部坐标系,坐标原点定义于车辆前部中点位置,X轴方向与试验车辆的航向保持一致,按照标准要求对视线盲区进行区域尺寸定义,详情见该标准中的4.2.1条款。
4 LCDAS试验验证
为获得期望的测试数据,在测试开始之前,需要对测试设备的初始状态进行精确的归零处理,在测试过程中,还要保证主车的航向角始终是稳定的指向相同的角度,这样才能保证以主车航向角为基准所测量得到的数据具有良好的实时性和有效性,下面选择两种典型工况进行LCDAS试验验证。
4.1 目标车超越主车试验验证
该项测试模拟了目标车从主车后方进入其视线盲区的场景,通过视频采集记录了LCDAS开始报警和停止报警两个时刻的试验结果,如表3所示,图4是测试视频示意图。
通过对比表2、表3可知,在实际的道路测试中,两车的车速/位置条件完全满足标准要求,同时考虑到车辆外廓尺寸对标准规定的视线盲区的修正,根据标准4.2.1可以对LCDAS报警开始时刻和报警关闭时刻的车辆相对位置进行该标准的符合性判断,因此表3的试验结果验证了目标车超越主车的测试场景具有期望的标准可操作性,反之也可实现对主车超越目标车的场景测试。
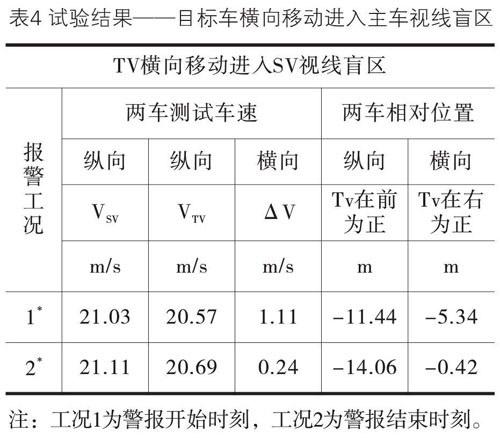
4.2目标车横向移动进入主车视线盲区
目标车横向移动进入主车视线盲区的测试场景,是该标准检测中具有较高测试难度的一项内容,需要对两车的行驶轨迹进行反复的模拟驾驶和场地适应性训练,图5给出了测试规范的示意图,部分试验结果见表4:
通过对比表2、表4可知,在实际的道路测试中,对两车之间的横向相对车速的控制是比较困难的,所列出的这次试验结果的横向相对车速,分别为1.11m/s和0.24m/s,这超出了标准要求给出的横向相对车速0.25~0.75m/s的允许裕度,在实际检测中只能通过反复测试来尽可能消除这种现象,以获得满意的测试场景。
4.3标准检测的可行性分析
根据实际测试经验和相关的技术资料,在执行该项目的标准检测时,以下几点制约因素应该予以重点关注,因为它们有可能会影响到对标準符合性要求的准确判断:
首先,在测试过程中,需要保持主车航向角始终处于一个稳定值,这是由于测试设备对视线盲区的监控具有严谨的实时性,所有轨迹纵向、横向的相对位置、相对速度都是以主车航向角为基准来进行计算的,如果主车航向角产生持续的漂移现象或者突变问题,都会导致全部数据发生混乱,进而影响到无法做出合理的判断。例如,图6示意图给出了这种航向角受到定位精度的影响,即使实现RTK锁定的GPS位置本身也存在几毫米的误差,由此导致在短距离内计算的航向角产生较大的误差(图示为0.57°),而在较长的距离中计算的航向角误差会大幅降低至0.11°,即其航向角精度会提高81%,由此可以看出,不稳定的航向角会严重的降低测试数据的可信度,同时由于全部数据都是按照主车航向角实时计算出来的,因此在原始数据曲线上会产生大量的毛刺现象,导致信噪比不可接受,测试无法执行下去。
其次,两车之间的横向相对距离、横向相对车速对两车驾驶员都有较高的要求,需要驾驶员之间互相配合默契,以保证在有限的场地条件下,尽可能的满足标准要求所给出的各种控制裕度。这一问题是所有ADAS项目检测中经常遇到的,因此对人类驾驶员提出了超乎寻常的挑战,目前只能通过持续的训练来弥补这方面的不足。
最后,在对原始数据进行后处理时,如何判断ADAS功能发出或结束警报的时刻是困扰试验工程师的一个普遍的人机工程问题,声音信号、视觉信号以及其他类型的警报信号在数据回放过程中的时刻是难以精确捕捉的,高强度的重复操作也会对身心尤其是视力健康产生损害,同时对测试结果的处理也会受到人员差异方面的影响而产生人为误差,因此,有必要在保证测试设备独立于ADAS系统的前提下,来讨论利用复合电子控制系统的控制信号来辅助指导ADAS警报时刻的可行性问题。例如图7中所示,在测试参数中增加一个触发信号,以标记ADAS系统警报时刻,由此可以较合理的解决这个问题。
综上所述,本文所设计的LCDAS测试方案能够满足期望的测试需求,在标准检测中具有相当程度的可行性。
5结束语
本文研究了ISO17387中LCDAS的检测内容,根据现有设备设计了一套试验方案,通过实车道路测试,验证了其可操作性,并总结出试验过程的注意事项,本文的实践经验和操作方法也同样适用于其它ADAS项目的试验研究,对智能汽车的试验具有指导意义。
