基于UG NX8.0的曲柄摇杆机构运动仿真与分析
2018-12-08王成成
王成成


摘 要:分析机构特征点的速度、加速度等参数是产品研发及实验不可或缺的步骤。利用UG NX8.0对曲柄摇杆机构特征点进行速度和加速度分析,得到了精准的数据,对机构方案的优化起到了积极作用。
关键词:平面四连杆;仿真与分析;UGNX8.0
中图分类号:TH122 文献标志码:A
0 引言
曲柄摇杆机构是平面四连杆机构的一种,普遍应用于牛頭刨床进给机构、雷达调整机构、缝纫机脚踏机构、复摆式腭式破碎机、钢材输送机、汽车雨刮器机构等。传统的设计方法需要进行大量的数据计算,制作模型进行运动演示,过程复杂,计算烦琐,设计周期长。虚拟仿真技术已经成为现代设计制造产业中不可或缺的一项技术,在航空、航天、汽车、造船、通用机械和电子等工业领域广泛应用。利用虚拟仿真技术进行曲柄摇杆机构的设计,不但能够提高设计速度,降低计算难度,还能够分析机构的位移、速度、加速度等参数,同时大大降低设计成本。
1 平面四连杆机构的建立
平面四连杆机构如图1所示,各构件长度分别问L1=200mm,L2=50mm,L3=260mm,L4=150mm,L1为固定连杆,L2为曲柄,L3为连杆,L4为摇杆。曲柄为主动件,转动速度为120r/min,通过连杆带动摇杆做摆动动作。
图1平面四连杆机构简图
2 平面四连杆机构的三维建模
UG NX8.0软件是一款集CAD/CAE/CAM于一体的三维参数化软件,利用该软件的“建模”功能对4个构建进行建模,如图2所示。利用该软件的“装配”功能将构件组装成平面四连杆机构,并将坐标系原点移动至L1与L4链接点,X轴与固定连杆L1平行Z轴垂直于机构所在平面,如图3所示。
3 建立连杆和运动副
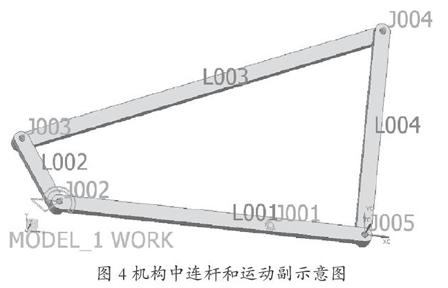
应用UG NX8.0“运动仿真”模块,定义4个连杆,并确定固定连杆。将L1定义为固定副J001,将4个连杆的连接处定义为旋转福运动副J002、J003、J004、J005,并且设置运动副J002为驱动,如图4所示。
4 运动仿真与分析
通过解算方案和求解,完成对整个机构的运算,实现对该曲柄摇杆机构的动画演示。在运动导航器中,通过XY-Graphing得到运动副J004的速度随时间变化曲线(图5)和加速度随时间变化曲线(图6)。分析速度曲线得知J004点的最大速度为1072.693mm/s,发生在0.21s,最大的加速度为19815.213mm/s2,发生在0.15s,机构的运行周期为0.5s。
结语
利用UG NX8.0可以很轻松地完成曲柄摇杆机构的建模、仿真,并对机构特征点的速度、加速度等特性进行精确的分析,得到精准的数据,可以很方便地修改机构参数,对机构进行优化,直到得到符合要求的结果。通过此法,可以提高产品研发精度,缩短研发周期,降低研发成本,对产品的研发及实验起到积极的作用。
参考文献
[1]侯凤国,田杨.基于Workbench的某牛头刨运动学分析[J].机械制造与自动化,2012,41(3):77-78.
[2]李锐.基于UG的机构运动仿真和分析[J].机械工程与自动化,2010(5):44-45,48.
[3]余振华.基于UG软件平台的四连杆机构运动仿真分析[J].机械研究与应用,2010,23(1):10-11.
