强耦合条件下非接触滑环工作特性分析与控制
2018-12-06陈乾宏何广明
陈 欣, 陈乾宏, 何广明
(南京航空航天大学自动化学院, 江苏省南京市 211106)
0 引言
在雷达供电、风力发电、直升机主翼除冰等应用中[1-3],需要使用导电滑环衔接动静部分,实现能量传输和信息交互。在旋转过程中,电刷与导电环动态接触,产生摩擦,降低了滑环工作的可靠性。气象雷达系统中,50%的故障是由滑环摩擦引起的;发电厂中发生环火或停机,也多由发电机励磁系统电刷过热引起。由此可见,接触式电滑环系统制约了旋转设备进一步的发展。
为解决上述问题,可用非接触滑环系统取代接触式滑环系统。非接触滑环系统的核心技术为无线电能传输(wireless power transfer,WPT)技术[4],根据媒介不同,WPT技术主要分为电磁辐射、超声波、电场耦合和磁场耦合方式。目前,磁场耦合式所受关注较多。磁场耦合WPT包括共振式和感应式两种,其中感应式WPT应用领域广,功率适应范围宽,系统传输效率较高。而滑环以旋转运动为主,定、转子间气隙不大且基本固定,功率需求范围宽。考虑滑环的工作特点,本文采用感应式WPT技术。
目前,国内外学者已围绕非接触滑环系统展开研究。南京航空航天大学在2005年已使用非接触滑环系统进行电机无刷励磁,但未采用谐振变换技术,系统效率较低[5]。哈尔滨理工大学则详细地研究了非接触励磁电源的谐振补偿方式[6]。重庆大学在主电路增加一个开关管,将能量信息一同传到次级回路,利用滑环实现电能与信号一体化传输[7]。波兰电子工程研究所研制了3 kW非接触滑环系统样机,采用串联谐振电路和零电流开关技术,最高效率可达93%[8]。新西兰奥克兰大学系统地研究了非接触旋转变压器的结构[9],并采用多相励磁方式实现非接触滑环系统的扩容[10-11]。
现有研究主要集中在补偿方式、多相励磁、非接触旋转变压器结构以及功率信号同步传输等方面,而未涉及非接触滑环系统工作条件的影响分析。非接触旋转变压器定转子间气隙较小,一般在1~10 mm之间,耦合系数一般大于0.5,属于强耦合工作条件[12]。本文分析了强耦合条件对非接触滑环系统工作特性的影响;为消除强耦合条件引入的3次谐波,采用了无中线的三相星形拓扑结构,并对其进行数学建模与工作特性分析;为适应变负载需求,对三相非接触滑环系统的控制策略进行研究,揭示在软开关实现上,不对称控制优于对称控制的原因。最后,搭建一台200 W的原理样机,对文中的理论分析进行了实验验证。
1 强耦合条件对非接触滑环系统的影响
常规非接触平面变压器的气隙较大,耦合系数一般小于0.5,属于弱耦合变压器。而非接触旋转变压器气隙较小,耦合系数一般大于0.5,属于强耦合变压器。本节主要研究强耦合条件对串/串(S/S)补偿非接触滑环系统工作特性的影响,以单相系统为例,拓扑结构如图1所示。S/S补偿分为补偿漏感和自感两种方式,补偿漏感时输出呈电压源特性,输入阻抗感性较大,导致系统效率较低;补偿自感时输出呈电流源特性,此时输入阻抗呈纯阻特性,无功损耗较小[13]。因此,本文针对补偿自感的方式进行研究,此方式适用于恒流充电的应用场合。

图1 单相S/S补偿等效电路Fig.1 Equivalent circuit of single-phase S/S compensation

1.1 强耦合条件对参数敏感性的影响
实际工作中,非接触旋转变压器原、副边相对位置会发生变动,引起耦合系数等参数发生变化。本节主要研究非接触滑环系统的电流增益特性关于耦合系数变化的敏感程度。
定义非接触旋转变压器原、副边正对时的位置为完全补偿位置,此时非接触旋转变压器参数加入下标“0”表示。当非接触旋转变压器原、副边大小,结构相近时,可近似认为原、副边自感与匝比n的平方成正比[14]:
(1)
根据上述定义与近似关系,可得S/S补偿变换器的输出电流增益关于耦合系数k变化的敏感度,如式(2)所示,具体推导过程见附录A第1节。
(2)
式中:Gt,SS为电流增益;ωr为谐振角频率;k为耦合系数。
以完全补偿位置对应的电流增益为基准值,用ξt,SS表示S/S补偿变换器电流增益变耦合敏感度的标幺值,有
(3)
从式(3)可以看出,S/S补偿变换器变耦合系数敏感度绝对值的大小与k0的取值成反比。增大k0的取值,可以减小变换器对变参数的敏感度。为验证上述分析,论文给出了S/S补偿变换器的电流增益Mathcad计算曲线,如附录B图B1所示,相关参数如附录B表B1所示。
从电流增益曲线可以看出,当耦合系数k从0.317变化到0.816时,电流增益曲线在谐振频率点处更加平坦,表明变换器对耦合系数变化的敏感度减小,与上述分析相符。
1.2 强耦合条件对输入阻抗的影响
如图1所示,定义m次谐波输入阻抗为Zin,m,其表达式为:
(4)
以基波输入阻抗Zin,1为基准值,将谐波输入阻抗标幺化为ZinN,m,具体如下:

(5)
式中:QS为副边品质因数,对于串联补偿,有QS=ωrLS/RE,取值一般在1~10之间。
从上式可以看出,k在分母位置,所以当k增加时,|ZinN,m(mωr)|值将减小。由于原边电流与输入阻抗成反比,所以|ZinN,m(mωr)|减小意味着原边电流中谐波含量的增加。附录B表B2给出了3次谐波输入阻抗标幺值的计算结果,从表中可以看出,随着耦合系数的增加,3次谐波输入阻抗大幅度减小,此时采用基波近似分析法将会产生较大误差,为此,本文给出原、副边电流准确的表达式,如式(6)和式(7)所示,具体推导过程见附录A第2节。

(6)

(7)

上式中相关定义如下:
(8)
虽然可以计算出考虑谐波时电流精确的数值,但谐波含量的增加会影响设备正常工作,因此需要抑制谐波,下面从三相拓扑结构的角度寻找解决方法。
2 三相非接触滑环系统拓扑分析
由第1节的分析可知,强耦合条件会导致非接触滑环系统中谐波含量大大增加。本节主要从三相拓扑结构的角度寻找解决方法。此外,与单相系统相比,三相系统还具有容量扩展[10]、易于实现容错功能[16-17]等优点。
2.1 原、副边拓扑结构选择
逆变电路有电压型逆变和电流型逆变两种。电流型逆变电路需要在输入侧串联大电感构成恒流源,不仅使得电路体积、成本和阶次增加,而且导致控制难度增加且动态性能恶化[18]。为避免上述问题,本文采用电压型逆变电路。对于电压型逆变电路,原边侧一般采用串联补偿。下面主要针对原边线圈的连接方式进行分析。
原边三相线圈连接方式分为星形连接和三角形连接,如附录B图B2所示。
采用三角形连接时,每相线圈的电压幅值与直流输入电压Vin相同,而采用星形连接时,每相线圈的电压幅值只有输入电压的2/3,因此,当输入电压一定时,采用三角形连接可以输出更大的功率。
采用星形连接时,中性点有接中线和无中线两种方式。无中线系统可靠性较高,且电路中不存在3次以及3的倍数次谐波。
由1.2节的分析可知,非接触滑环系统工作在强耦合条件下,谐波含量会大大增加,而采用无中线的星形连接方式可以有效解决上述问题。综合考虑,本文原边线圈连接方式选择无中线的星形连接方式。
副边线圈采用星形连接时,整流电路的输出电压为线电压,而采用三角形连接时,整流电路的输出电压为相电压,因而副边采用星形连接时可以得到较高的输出功率;此外,当采用无中线的星形连接时,可以消除电路中3次及3的倍数次谐波。所以,副边线圈采用星形连接。此外,本文针对恒流充电的应用场合,副边采用串联补偿[13]。
2.2 三相系统等效电路
通过2.1节的讨论,可得三相非接触滑环系统的整体拓扑结构,如图2所示,其中:Vin和Iin分别为三相逆变电路的输入电压和电流;Vo和Io分别为三相整流电路的输出电压和电流;iA,iB,iC分别为非接触旋转变压器原边各相电流;ia,ib,ic分别为非接触旋转变压器副边各相电流;Qi(i=1,2,3,4,5,6)和DRi(i=1,2,3,4,5,6)分别表示三相逆变电路和整流电路的功率管;LPφ和LSφ(φ=A,B,C)分别为三相原、副边自感;CPφ和CSφ(φ=A,B,C)分别为三相原、副边串联补偿电容;MA,MB,MC为各相原、副边线圈之间的互感值;Co为整流电路输出滤波电容;RL为负载电阻。

图2 三相星形连接S/S补偿非接触滑环系统Fig.2 Contactless slipring system with star-connected three-phase S/S compension
下面对上述三相非接触滑环系统进行建模[19],原、副边等效电路见附录B图B3,原边相关方程总结如式(9)和式(10)所示,副边相关方程总结如式(11)—式(13)所示,具体推导过程见附录A第3节。
(9)
(10)
(11)
(12)
(13)
2.3 三相系统的电流增益
以A相为例,图3给出了A相电路相电压及其基波分量的波形图,其中,vAN表示相电压,vANS表示基波分量。通过傅里叶分解可得基波分量幅值:
(14)
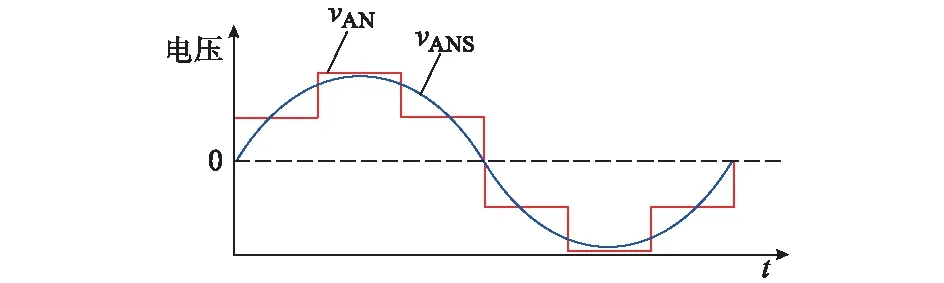
图3 单相线圈电压波形Fig.3 Voltage waveforms of single-phase coil
图4给出了副边各相电流以及电容滤波前输出电流Id的波形,从图中可以看出,输出电流的脉动频率是基波频率的6倍,脉动幅值减小,因此可以大大减小滤波电容的取值。根据图4可求得负载电流Io的表达式为:
(15)
式中:Ia为副边a相电流幅值。

图4 输出电流波形图Fig.4 Output current waveforms
单相系统谐振频率点处的电流增益为1/(ωM),结合式(14)和式(15)可求得三相系统谐振频率点处的电流增益为:
(16)
3 三相非接触滑环系统的控制策略
非接触滑环系统的工作频率一般大于20 kHz,在大功率的应用场合需要确保实现软开关,因此本节在比较不同控制策略时重点关注了软开关的实现情况。
3.1 三相系统的电流增益
如图5所示,对称控制[20]指桥臂上、下两管导通时间一样,各开关管开通时间相隔1/6开关周期,并按照Q1至Q6的顺序依次轮流导通。当占空比D小于1/6开关周期时,每一个时刻只有一个开关管导通,无法形成闭合回路。而当占空比大于1/2开关周期时,桥臂直通,引起短路故障。因此,采用对称控制时,占空比一般在1/6~1/2开关周期之间。
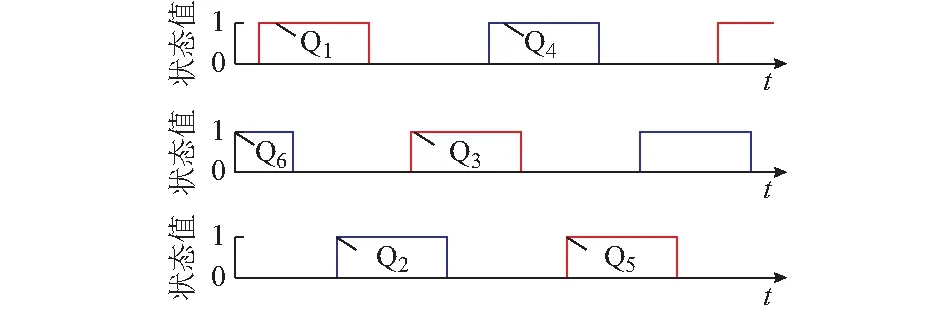
图5 对称控制方式开关时序Fig.5 Switching sequence of symmetrical control mode
如附录B图B4所示,在初始状态,假设输入阻抗呈感性,相电流iA滞后相电压vAN的角度为θ。定义α为占空比减小的角度。
当MOS寄生体二极管在MOS管开通前导通,将MOS管两端电压钳位,此时可以实现零电压开通。由于MOS管结电容的存在,默认可以实现零电压关断。在初始时刻,感性角θ使得软开关能够实现,但是,随着占空比的减小,MOS管的反并联二极管在MOS管导通前将不再导通,此时会丢失软开关的条件。以Q1管为例,从附录B图B4可以看出,若Q1管的开通时刻t1在iA过零点之后,将丢失软开关的条件,所以采用对称控制时实现软开关的条件为:
α<θ
(17)
在此范围内调节驱动信号占空比,由于MOS体二极管续流,所以三相逆变电路输出相电压vAN的占空比保持不变[21],此时输出电流不可调。
3.2 不对称控制
由3.1节分析可知,采用对称控制时,随着占空比的减小,不可控时间随之增加,使得调宽过程中容易丢失软开关的条件。为此,可以让同一桥臂上下两个开关管互补导通,以减小调宽过程中不可控时间。由于同一桥臂上下两管导通时间不同,所以称为不对称控制[22]。
实现方法如图6所示,上桥臂开关管Q1,Q3,Q5管的开关时序保持不变,依次轮流导通,下桥臂开关管Q2,Q4,Q6分别与上桥臂开关管互补导通并预留一定的死区时间。
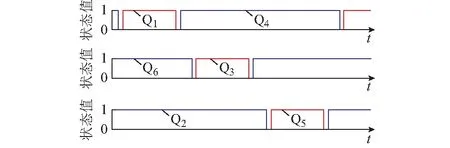
图6 不对称控制方式开关时序Fig.6 Switching sequence of asymmetrical control mode
本节讨论的是上管占空比小于下管占空比的情况,上管占空比大于下管占空比的情况可以通过类比得到。为方便分析,附录B表B3给出了不对称控制不同时段所对应的角度。
如附录B图B5所示,当上管导通时,如果对应的相电流小于0,表示续流二极管导通,能够实现软开关。以1管为例,实现软开关的条件为θ>α/2,所以上管实现软开关的条件为:
α<2θ
(18)
同样的,如果下管要实现软开关,则需要相应的相电流在其开通时大于0,以4管为例,需满足:
(19)
由于α的变化范围是0~180°,所以180°-α/2的变化范围是90°~180°。一般θ小于90°,所以式(19)恒成立,即下管一定能够实现软开关。
采用不对称控制调节驱动信号占空比,三相逆变电路输出相电压与调宽角度满足如下关系:
(20)
结合式(14),可得输出电流表达式为:
(21)
初始状态时α=0,对应的电流为:
(22)
由于不对称控制实现软开关的范围是α<2θ,所以输出电流调节范围为:
(23)
综上所述,对于上管而言,采用不对称控制调宽时实现软开关的范围是采用对称控制时的2倍。而且当采用不对称控制时,下管一定具备实现软开关的条件。在上、下两管均实现软开关的条件下,输出电流的调节范围为1-cosθ。
4 实验结果与分析
为了验证上文的理论分析,搭建了一台200 W的原理样机,如附录B图B6(a)所示,整个样机主要由逆变电路、补偿网络、非接触旋转变压器、整流电路组成。如附录B图B6(b)所示,非接触旋转变压器原、副边匝比为12∶12,采用柱式安装结构,在垂直方向上通过尼龙柱相连,依次叠放。通过底部的法兰盘与转台固定,原边固定在转台的定子侧,副边固定在转台的转子侧。
在完全补偿位置处,三相系统电流增益交点约为0.03。电压增益由电流增益交点和负载共同决定,如负载电阻为50 Ω时三相系统的电压增益为1.5。
4.1 参数敏感性验证实验
使用Agilent E4980A LCR测试仪(20 Hz~2 MHz)对非接触旋转变压器参数进行测试。附录B表B1给出了单相系统在25,15,8 mm气隙条件下的相关参数,测试频率为100 kHz,8 mm气隙条件下测得最大耦合系数为0.816[9]。
负载电阻均为50 Ω,分别以k=0.523和k=0.816为完全补偿点,改变耦合系数,测试非接触滑环系统电流增益。为了直观地进行比较,分别以各自完全补偿点处的电流增益为基准值,对电流增益进行标幺化处理,将曲线放在同一刻度下。
如附录B图B7所示,当完全补偿点处耦合系数k从0.523增加到0.816时,在完全补偿点处,曲线变得更加平坦(斜率的绝对值由6.4减小到0.2),表明变换器对变耦合系数的敏感性减小。
4.2 谐波验证实验
附录B图B8给出了不同耦合系数下原边电流的波形,从图中可以看出,随着耦合系数k的增加,电路中的谐波含量也在增加,从而导致原边电流发生畸变。
附录B图B9给出了耦合系数为0.523,负载电阻为1 Ω时,原边电流计算值与实测值的对比波形,对比结果表明,理论波形与实测曲线均几乎完全重合,验证了本文推导的电流精确表达式的正确性。
附录B图B10给出了单相系统和三相系统原边电流傅里叶分解对比图,从单相系统的波形图中可以看出,原边电流中存在较多的3次谐波含量,当采用三相系统后,3次谐波基本消除。
4.3 调宽控制实验
三相系统的主要参数如附录B表B4所示,测试频率依然为100 kHz。
附录B图B11给出了采用对称控制调宽时的主要实验波形,其中D=0.48为初始工作状态时的占空比。当占空比从0.48减小到0.42时,上、下两管同时丢失软开关的条件。
附录B图B12给出了采用不对称控制调宽时的主要实验波形,图中的占空比均指上管的占空比,初始的工作状态与对称控制的相同。从图的变化过程可以看出,随着占空比的减小,上管会逐渐丢失软开关的条件,而下管却可以一直实现软开关。此外,通过对比附录B图B11(b)和附录B图B12(a)可以看出,虽然两者的占空比相同,但采用对称控制方式时已经丢失了软开关的条件,而采用不对称控制时恰好处于临界状态,说明采用不对称控制调宽时上管实现软开关的范围比对称控制的要大。
4.4 效率测试
采用YOKOGAWA公司的WT500功率分析仪对三相系统原理样机进行效率测试,测试端口为逆变电路输入端和整流电路输出端。原理样机的效率曲线如附录B图B13所示。从图中可以看出,系统效率随着负载的增加呈现先增加再减小的趋势,输出功率约为180 W时,效率最高约为87.1%。
5 结语
针对非接触滑环系统中非接触旋转变压器强耦合条件的工作特点,本文以S/S补偿非接触变换器为例,对其工作特性进行研究,虽然耦合系数的增加可以减小变换器对变参数的敏感性,但同时也将导致电路中谐波含量大大增加,从而使得基波近似分析法产生较大误差,为此,文中给出了考虑谐波影响时原、副边电流的精确表达式。此外,本文通过采用无中线的星形结构,消除了电路中3次以及3的倍数次谐波,并对三相系统的调宽控制进行研究。文中给出了采用不同控制方式下实现软开关的调宽范围,并发现采用不对称控制比对称控制更容易实现软开关。最后,通过一台200 W的原理样机验证了理论分析的正确性。
文中对三相系统的建模、基本工作特性以及调宽控制等方面进行了研究,而三相非接触滑环系统还具有容量扩展、提高容错能力的优点,这两方面的内容还有待深入研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。