煤矿救援机器人及本安驱动系统的应用研究
2018-12-04温学雷
温学雷
(中煤科工集团重庆研究院有限公司,重庆市沙坪坝区,400037)
我国是煤矿事故多发国家,各种煤矿事故导致了严重的人员伤亡和巨大的经济损失。如何在事故发生后实施及时有效的救援是值得深入思考的问题。据我国原国家安全生产监督管理总局对全国67个煤矿救援队的装备需求调查表明,基本提出了对煤矿井下救援机器人的迫切需求,尤其是在0区环境(即连续出现或长期出现爆炸性气体混合物的环境)中代替救援人员进入灾区,对保障救援人员的安全及提高救援成效具有重大意义。鉴于此,近年来国内外不断加大对煤矿救援机器人的研制力度,并推出多种机器人样机,由于绝大多数采用隔爆驱动(用以保障机器人的动力需求),因此导致机器人无法满足在0区环境中的使用条件。基于此,本文通过分析煤矿救援机器人国内外研究现状及应用,提出一种在本安驱动下提升机器人动力性能的方法,并进行了试验研究。
1 煤矿救援机器人研究现状
国外针对矿山救援机器人的研究始于20世纪80年代,经历了前期研究,目前正进入实用化研究阶段。典型的主要有澳大利亚研制的第一台煤矿救援机器人Australia CSIRO Numbat;新西兰惠灵顿维多利亚大学研制的煤矿井下救援飞行器以及由美国Sandia国家实验室研制成功的煤矿救援机器人Gemi-scout。上述机器人均属隔爆防爆等级,无法在0区环境使用。
相对国外,我国在煤矿救援机器人方面研究起步较晚,但进步较快。如中国矿业大学研制的国内首台矿山救援机器人CUMT-I和中信重工开诚智能装备有限公司的煤矿井下探测机器人,上述两款救援机器人依然为隔爆防爆等级。中煤科工集团重庆研究院有限公司于2014年研制出了国内首款本安防爆型救援探测机器人,首次实现煤矿救援机器人可在0区环境使用,然而动力性能较弱,因此造成机器人行走及越障能力较差,实用性较低。
2 煤矿本安驱动机器人应用及分析
据调研,目前尚未有本安驱动救援机器人国内外的成功应用案例,分析主要原因如下:针对0区环境的救援,未达到本安防爆等级的机器人禁止投入使用;满足本安防爆要求的救援机器人因动力性能不足,虽然符合0区环境中使用条件,却无法在实际矿井环境中行走及越障,基本不具备实用性。上述情况造成了针对0区环境中的救援无实用的救援机器人。因此,如何在本安驱动条件下提升机器人动力性能成为煤矿救援机器人的关键问题,直接制约机器人的实用性。
3 本安驱动系统研究及试验
3.1 本安驱动系统总体设计
依据《爆炸性环境第4部分:由本质安全型“i”保护的设备》(GB3836.4-2010)要求,本安电路最大功率不超过33 W。基于此,本文提出“分功合流”思想,设计本安驱动系统总体方案如图1所示。
采用多个不超过33 W的本安驱动单元通过液压并联利用流量合成为大功率本安驱动系统,为煤矿救援机器人提供动力驱动。依据液压原理可知,理论上各支路压力与总油路压力相同,各支路流量之和与总油路流量相同,但实际由于系统阻力损失,存在合成效率。因此,本安驱动系统的功率合成情况取决于液压系统的流量合成效率。
3.2 本安驱动单元设计
本安驱动单元主要包括电池、电机、液压泵及其控制电路等。根据《爆炸性环境第4部分:由本质安全型“i”保护的设备》(GB3836.4-2010)中Ⅰ类电感线路计算确定关键元器件参数为:电池电压为24 V,电机电感为110 μH,电机电压为24 V,电机额定转速为1500 r/min,电机额定扭矩为73 N·m,液压泵排量为12 mm3,液压泵额定工作压力为15 MPa,液压泵启动扭矩为10 N·m。依据检验标准进行了电火花试验,试验结果满足本安防爆要求。

图1 本安驱动系统总体方案
3.3 基于本安驱动的液压合流系统设计
依据电机及液压泵参数,确定液压系统工作压力为15 MPa,每个本安驱动单元为一个支路,通过并联后将各支路流量合成,设计本安驱动系统液压合流原理如图2所示。

1-冷却系统;2-液压泵;3-电机;4-卸荷阀;5-数显压力表;6-数显流量计;7-调压溢流阀图2 本安驱动系统液压合流原理
各支路设置均设置单向阀、数显流量计及数显压力表,用于测量各支路流量及压力,总路上设置压力调节阀,用于系统压力调节。
3.4 试验平台搭建及验证
依据本安驱动系统液压合流原理搭建试验平台,该试验平台设计了5个本安驱动单元支路进行合流试验,设置电机转速1000 r/min,调节液压系统压力为15 MPa,待系统运行10 s后,每间隔10 s测量各支路及合成流量数据。本安驱动系统测试原理机如图3所示,本安驱动系统液压合流测试结果如图4所示。

图3 本安驱动系统测试原理机
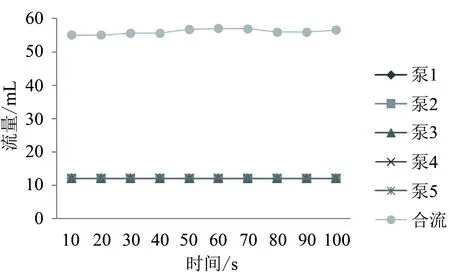
图4 本安驱动系统液压合流测试结果
测量的各支路及总路压力数据如图5所示。

图5 本安驱动系统压力测试结果
由图5可以看出,总油路压力与各支路压力基本保持一致,可忽略压力损失。计算出该系统在5路合成工况下流量合成效率如图6所示。
由图6可以看出,由试验测试结果表明,该系统是本安条件下提升动力性能的有效方法,合理可行。
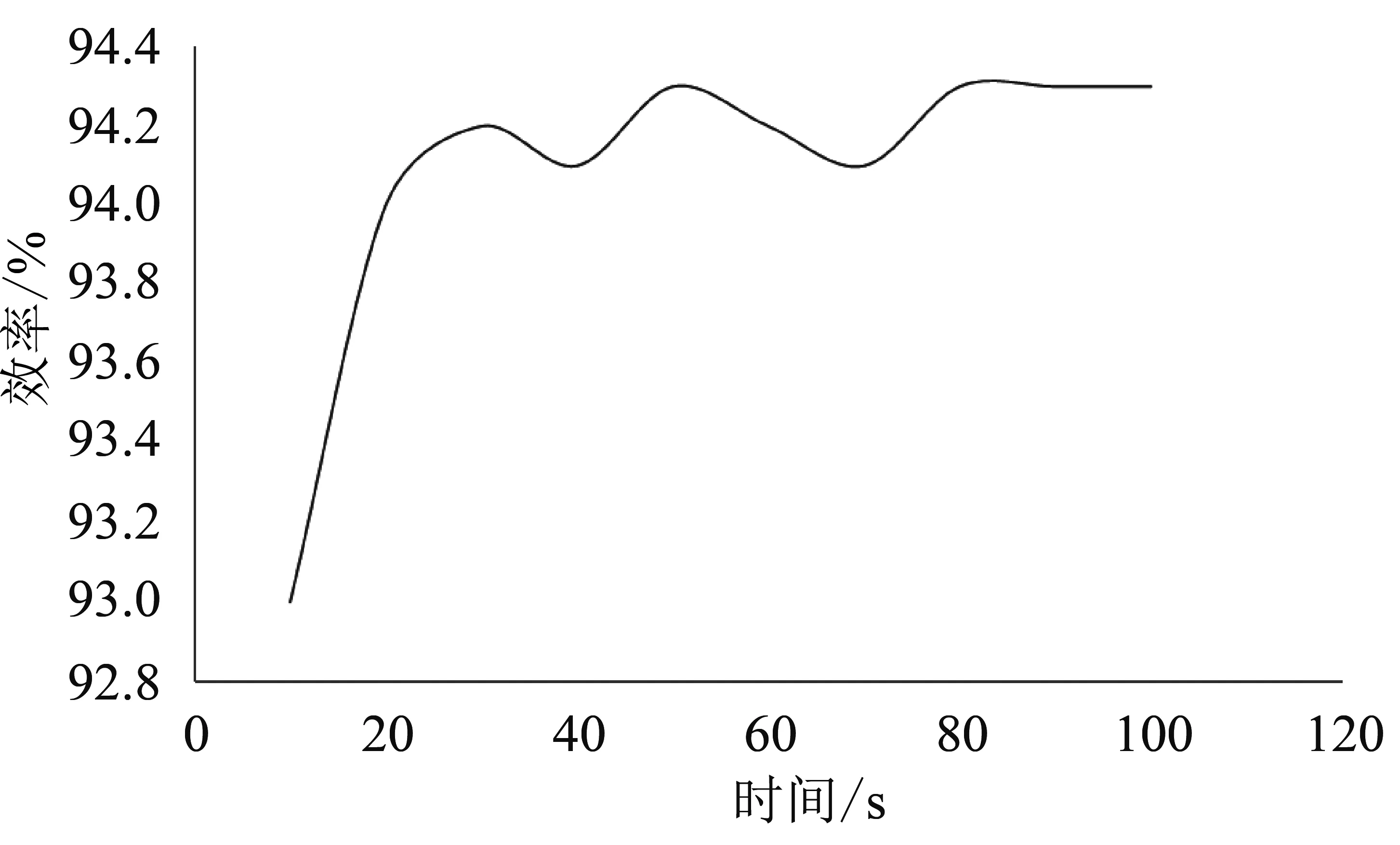
图6 本安驱动系统合成效率
4 结论
(1)煤矿救援机器人的研究目前正处于试验样机向实用化研制的阶段。
(2)本质安全条件下提升救援机器人的动力性能是针对0区环境的救援机器人的关键问题。
(3)通过试验研究得知,在五泵并联前提下,基于液压合流的本安驱动系统合流效率达94%,验证了该方法是本质安全下提升机器人动力性能的有效解决方案。