基于线性自抗扰的开关磁阻电机调速控制研究
2018-11-28,
,
(华南理工大学 自动化科学与工程学院,广州 510641)
0 引言
开关磁阻电机(Switch reluctance motor,SRM)是继直流电机与交流电机之后发展起来的一款新式无极调速电机。由于其具有结构简单、控制方式灵活、系统能量转换效率高等诸多优点,因此受到了现代电气驱动领域的广泛关注。但是由于开关磁阻电机内部呈现双凸极结构以及磁路易饱和的特点,使得磁链、转矩均为转子位置和电流的非线性函数。因此开关磁阻电机调速系统是一个变参数、非线性、强耦合的时变复杂系统[1]。在线性领域具有良好控制效果的PID控制方式无法使其获得高要求的动静态性能。文献[2]介绍了一种基于最优开通角的控制方法,但其性能依赖于被控模型的精确程度;文献[3]给出了基于模糊规则的PID控制策略,但其控制效果十分依赖模糊规则,而模糊规则的建立需要操作者拥有大量实践操作的经验。
自抗扰控制(active disturbance rejection control,ADRC)技术是由中科院韩京清研究员在经典PID控制的基础上改进后形成的一种新型控制方法[4]。自抗扰控制算法结构简单,鲁棒性强,可对系统受到的各种扰动进行精确估计并补偿,对被控对象参数的变化及不确定性也具有很好的适应性。目前已广泛应用于电力系统、精密器械、加工车床、化工过程和现代武器系统等领域。但是自抗扰控制器参数过多,参数整定麻烦,这限制了其进一步发展。文献[5]给出了利用带宽的概念将自抗扰控制器线性化的方法,从而提出了线性自抗扰控制(linear active disturbance rejection controller,LADRC)方法。与ADRC相比LARDC在保持了自抗扰控制算法优良控制性能的基础上,简化了算法结构,减少了控制参数数量,使参数整定更加容易,更便于进行工程应用。文献[6]对线性扩张状态观测器对对象模型不确定性的估计收敛性进行了证明并给出了LADRC闭环系统的稳定性分析。
本文采用线性自抗扰控制算法设计开关磁阻电机调速系统控制器。利用系统辨识方法获得被控对象的数学模型,根据得到的数学模型设计扩张状态观测器和PD控制器。通过仿真对线性自抗扰控制器的控制效果进行了验证。
1 开关磁阻电机调速系统特性
1.1 开关磁阻电机调速系统结构
本文研究的对象是开关磁阻电机调速系统,该系统基本结构如图1所示。

图1 开关磁阻电机调速系统结构图
该系统结构主要包括开关磁阻电机、功率变换器、转子位置检测电路、电流检测电路和控制器5个部分[7]。转子位置电路实时检测转子位置信号,并送入控制器可计算得到电机的实时转速;功率变换器按控制器给定的策略将电源提供的能量传递给SRM,驱动电机运转;电流检测电路检测相绕组上的电流,为系统实现电流斩波控制和过流保护提供基础;SRM作为系统的被控对象主要完成系统中机电能量之间的转换。
1.2 开关磁阻电机的数学模型
开关磁阻电机是一种典型的非线性系统,系统磁场空间结构复杂,使用传统的电机性能分析方法很难得到其系统的准确模型,因此需要对其对象模型进行辨识[8]。本文利用试验与仿真结合的方法建立被控对象的数学模型。先通过试验采集得到系统的输入、输出数据,再通过数值工具离线拟合得到其近似传递函数模型,具体的辨识过程如下:
1)在空载情况下,以电压脉冲信号作为控制输入,以实际转速作为输出,对电机实施开环控制进行数据采集。
2)将采集得到的数据导入MATLAB中进行读取,利用MATLAB的模型辨识工具进行辨识。
3)对估计模型进行选择,根据实际转速数据曲线特征,开关磁阻电机可近似为一个二阶模型。对辨识得到的模型进行试验,试验得到的数据可以很好的拟合实际采集的数据。
本次设计最终辨识得到的被控对象的传递函数为:
(1)
2 控制系统设计
2.1 线性自抗扰控制基本原理
PID控制策略是一种固定状态的控制策略,即每次整定得到的参数只对某一种状态固定的系统有效。而对于系统结构和参数均随时间不断变化的非线性系统,单一状态的PID控制策略很难在整个控制范围取得理想的控制效果。正是在这种背景下产生了自抗扰控制策略,而高志强在自抗扰控制的基础上利用带宽概念提出了线性自抗扰控制策略[9]。
典型系统的线性自抗扰控制原理图如图2所示。

图2 典型系统线性自抗扰控制器结构图
由图可知线性自抗扰控制器由跟踪微分器(TD)、PD(比例-微分)控制器和扩张状态观测器(ESO)三部分组成[9]。跟踪微分器的作用是为输入信号安排过渡过程并提取高品质的微分信号,从而解决了传统PID控制误差信号选择不合理的缺陷。引入过渡过程不仅可以提高控制器鲁棒性,还可以使控制器参数适应的对象范围更大,增强控制器的适应性。作为自抗扰控制器的核心,扩张状态观测器能够在不知道系统精确数学模型的情况下,利用系统的输入和输出估计出被控对象各阶状态变量以及对象受到的总扰动并给与补偿,从而使系统转化为简单的“积分串联器型”线性系统。PD(比例-微分)控制器将跟踪微分器的输出与扩张状态观测器观测估计之间的误差进行线性组合构成控制量来抑制稳态误差。通常情况下LADRC可不用设计“过渡过程”即微分跟踪器即可得到良好的控制性能,因此LADRC控制器结构更加简单,便于工程实现。
2.2 线性自抗扰控制器设计
以开关磁阻电机作为系统被控对象来设计线性自抗扰控制器,设计过程具体如下。
为使设计的控制器具有通用性我们设上述二阶系统为如下表示形式:
(2)

(3)

针对上述系统设计线性扩张状态观测器(LESO),其具体形式如下所示:
(4)
其中:β1、β2、β3是状态观测器的参数。通过对观测器中的参数进行适当的调节,这个状态观测器的各个状态变量zi(t)便可实时跟踪式(4)所表示系统的各个状态变量xi(t)(i=1,2,3)即有:
z1(t)→x1(t),z2(t)→x2(t),z3(t)→x3(t)
接着设计PD控制器。为提高开关磁阻电机调速系统的快速响应性能以及使算法便于实现,LADRC控制律采用线性组合的形式,假设
(5)
这里若忽略对的估计误差,则式(4)所表示的系统可简化成一个积分串联结构,即为:
(6)
则PD控制器可设计成如下形式:
u0=kp(x*-z1)-kdz2
(7)
式中,x*表示系统给定,kd为控制器增益。
综上所述,式(4)、(5)、(7)便构成了本次设计的线性自抗扰控制器(LADRC),其结构如图3所示。

图3 线性自抗扰控制器结构示意图
但上述LADRC形式依然有多个参数需要整定,因此文献[9]引入了带宽的概念来进一步简化算法的参数设计。综合式(6)和(7)可得系统的闭环传递函数为:
(8)
根据文献[8],可将式(9)的参数选为:
(9)
式中:ωc称为控制器的带宽,ξ为系统阻尼比。当ξ=1时,上式可变为:
(10)
同理我们可以求得线性扩张状态观测器式(5)的特征方程为:
λ(s)=s3+β1s2+β2s+β3
(11)
假设理想线性扩张状态观测器的特征方程为,则上下两式对比有:
(9)
式中,ω0称为观测器的带宽。
这样通过引入带宽的概念,LADRC控制器参数配置问题就被简化为选取合适观测器带宽和控制器带宽问题,相比于ADRC,需要调节的控制参数数量大幅减少。
2.3 线性自抗扰控制器的参数整定
因为线性自抗扰控制器是一种不依赖被控对象控制模型的控制方法,只需确定好合适的参数即可实现对被控对象的稳定控制。由前述分析可知,LADRC已将控制参数整定简化为只需整定控制器带宽和观测器带宽两个参数即可,且二者可独立调整。此外,控制增益的选择也会对系统的动态特性产生影响。本节将介绍一种根据实际工程经验总结得到的对于二阶系统的参数配置方法[10-13]。
控制器带宽调节。
1)若被控对象的数学模型已知,则可根据其模型写出式(4)所示的状态方程,从而可确定控制增益;若被控对象难以建立数学模型,则可利用“时间尺度”模型辨识方法辨识出系统的大致数学模型,根据其初步选取控制增益。
2)对参数和选定一个初值,然后固定不变,慢慢增加直至噪声的影响难以满足系统的性能要求为止。
3)再慢慢增大,直至系统难以承受噪声的影响而产生输出波动时,减小,然后再慢慢增大,如此反复循环调试,直至达到设定的控制要求。
4)若无论怎样调节,都无法消除噪声带来的影响时,可采用在LESO输入端增加滤波器的方法,然后重复第三步的过程确定和。
5)若在调参的过程中,系统动态跟踪过程出现过大幅度的震荡,则可通过调节来调节其系统的动态过程。
6)若在调参过程中控制量出现了深度饱和现象,则可根据第一步辨识得到的被控对象的时间尺度为LADRC设计“安排过渡过程”即跟踪微分器来进行调节。
3 仿真研究与分析
3.1 仿真模型建立
在MATLAB上建立基于线性自抗扰控制器的开关磁阻电机调速系统模型,对控制器的控制效果进行仿真试验,验证线性自抗扰控制器的控制性能并与基于PID控制器的调速效果进行比较。
本次仿真控制的开关磁阻电机已经通过辨识得到了其数学模型为G(s)=0999/[(1.816s+1)(1.501+1)]。线性自抗扰控制器需要整定3个参数,分别是b0、ωc和ω0。根据上节介绍的参数整定方法分别整定得到b0=0.012、ωc=9,ω0=30。采样时刻Ts=0.009s。
3.2 仿真结果
图4显示了给定系统额定转速为500 r/min下,系统实际转速的变化曲线。由仿真曲线可以看出:转速启动平稳且启动时间短,启动时间仅需0.16 s,满足启动控制速度快的要求,稳态运行时基本无超调,稳定时间短,只需1.026 s系统即可稳定且在稳定情况下转速几乎无波动。

图4 线性自抗扰控制500 r/min启动情况
图5显示了扩张状态观测器的输出对系统实际输出的跟踪情况,由仿真曲线可以看出状态观测器的估计值跟踪效果良好。
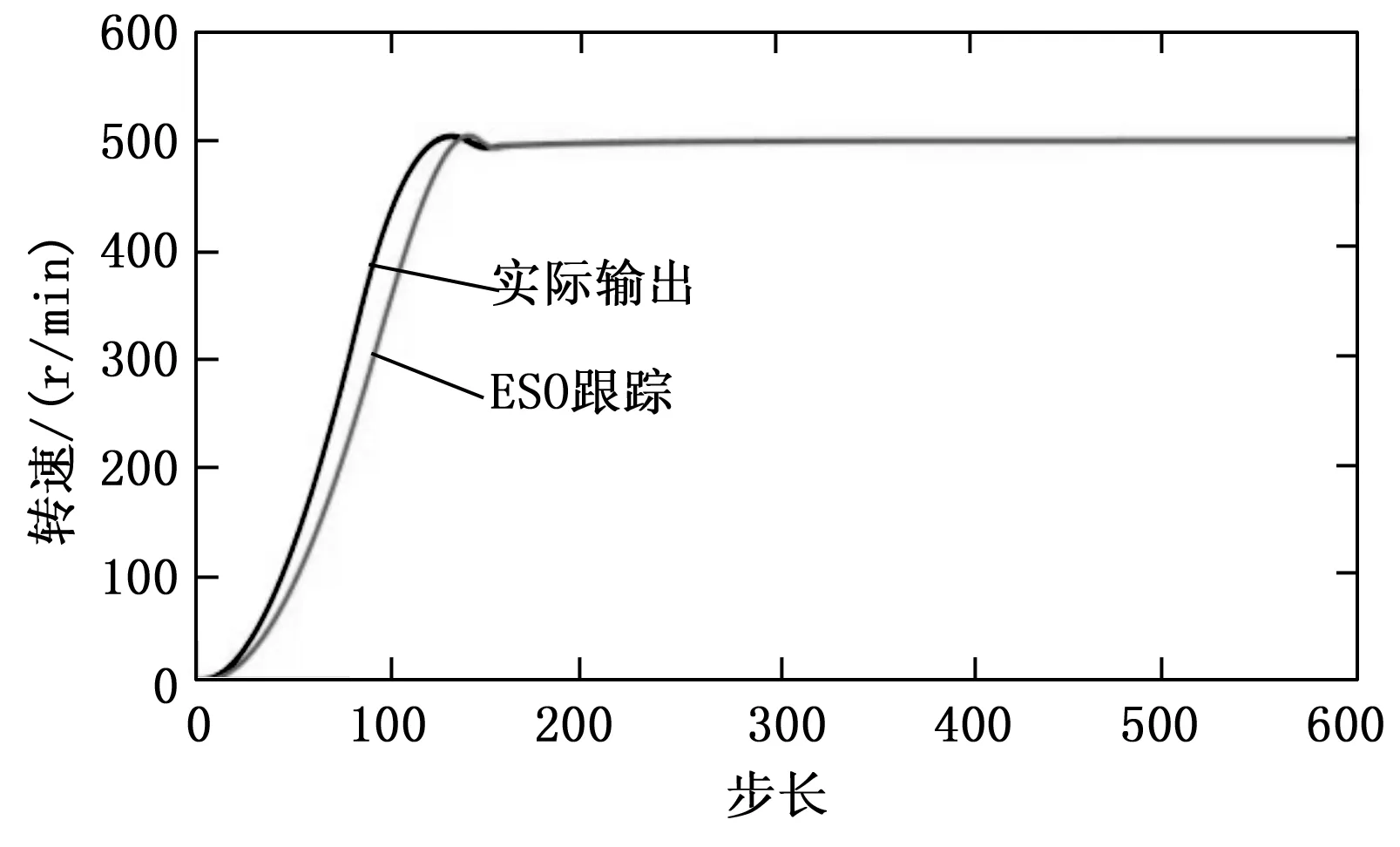
图5 状态观测器估计与系统输出曲线
在实际应用中电机的给定转速通常会实时变化,图6显示了给定转速突变时时,系统输出的跟踪情况。由图可知,系统对给定突变具有很快的响应速度,且稳态精度很高,控制效果良好,显示了基于线性自抗扰控制器的调速系统具有良好的跟踪特性。

图6 给定变化下的系统输出曲线
由于开关磁阻电机变结构、变参数的特点,因此其模型在运行过程中始终处于变化之中。我们对前述得到的模型参数进行改变之后再进行试验。图7显示了改变了模型参数的系统在给定转速为500 r/min下的输出曲线,结果显示实际输出仍能很快跟踪给定值,且启动、稳态性能良好,表明线性自抗扰控制器对于模型参数变化带来的内部扰动也具有很好的抵抗能力。

图7 改变模型参数后的500 r/min启动情况
最后在同样的条件下对使用PID控制器的开关磁阻电机调速系统进行仿真试验,仿真结果显示对于给定的阶跃信号线性自抗扰控制系统启动更快,只需0.09 s即可达到稳态且无超调,而PID控制系统需要3 s才能实现稳定跟踪。其仿真曲线分别如图8、图9所示。

图8 PID控制下的转速变化曲线

图9 线性自抗扰控制下的转速变化曲线
4 结论
本文利用LADRC对开关磁阻电机速度环控制器进行设计。利用线性自抗扰控制器不依赖被控对象精确模型的优势,避开了无法获得开关磁阻电机准确数学模型的弊端。通过对基于线性自抗扰控制器的开关磁阻电机模型进行仿真并与PID控制进行比较可知:这种控制策略对开关磁阻电机具有良好的控制效果,并且由于其通过利用状态观测器可对系统内、外部扰动进行观测并补偿,使得该控制策略具有良好的鲁棒性。因此线性自抗扰控制方法非常适合应用于开关磁阻电机这一类给定多变、非线性严重、扰动多的控制对象。
