一种机载LiDAR点云条带重叠度自动检查算法
2018-11-23刘润东宋袁龙彭桂辉
刘润东,宋袁龙,彭桂辉
(1.广西壮族自治区遥感信息测绘院,广西 南宁 530000;2.西安煤航技术发展研究院,陕西 西安 710054)
机载激光雷达(LiDAR)测量技术的出现和发展,为地理空间三维信息的获取提供了全新的技术手段,是遥感测绘领域继GPS以来的又一场技术革命[1]。机载LiDAR以其精确、快速、高效的优势正在逐渐取代传统摄影测量,作为获取DEM的主要手段。在机载LiDAR生产过程中,激光航摄数据采集是整个项目生产的数据源头,控制好激光航摄数据的采集质量才能保证数据后处理生产出合格的测绘产品。在这种形势下,快速、精确的LiDAR数据质量检查方法就显得尤为重要。而目前有关机载LiDAR数据处理的研究基本集中于数据后处理阶段,对前期机载LiDAR数据质量检查方法的研究少之又少。
机载LiDAR在数据采集时,受扫描视场角和航高的限制,一个测区数据的采集必须进行多条航线飞行。这些航线之间需要设置一定的旁向重叠度,以保证数据采集能覆盖整个测区[2]。CH/T 8024-2011《机载激光雷达数据获取技术规范》[3](下文简称“规范”)在点云数据质量控制内容中明确规定:点云的重叠度应满足13%~20%,无绝对漏洞。目前,对点云旁向重叠度的检查主要采用人工目视和抽采样量测检查,存在效率低、易漏检等问题。
通过调研点云旁向重叠度检查工作的实际需求,在对点云条带数据边缘点分析的基础上,本文提出了一种点云条带重叠度自动检查算法。该方法仅需条带边缘数据参与计算,减少了海量点云数据对计算机内存带来的压力,适合进行多条点云自动化批处理。
1 基于点云边缘的条带重叠度自动检查
1.1 点云条带重叠度检查内容
点云条带的边界受地形、飞行条件的影响,呈不规则曲线形态,相邻条带两个边界的不同位置均有各自的重叠度。重叠度的计算公式为:

式中,K为条带间某位置的重叠度;L为该位置沿扫描线方向的条带宽度;d为该位置重叠区域的宽度。
规范中所提到的点云重叠度应理解为最小重叠度,即点云条带间重叠度的最小值,该值若满足要求,重叠度则为合格。因此,条带重叠度检查就是要计算相邻条带间的最小重叠度,并检测该值是否满足要求。
1.2 条带边界获取
LiDAR点云数据包括多种格式,为了实现不同系统之间的数据共享,美国摄影测量与遥感协会下属的LiDAR委员会发布了主要面向机载LiDAR数据的标准格式LAS[4]。该格式是目前点云处理的通用格式,绝大多数机载LiDAR作业后获取的点云成果均以LAS数据提交。LAS格式中定义了条带边界点位置标记和激光扫描方向标记,利用这两种信息均可获得条带的边界点(本文采用推扫式“Z”形激光扫描仪):
1)条带边界点位置标记值为1,则表示该点位于扫描线的末尾,即为条带边界点。
2)激光扫描方向记录了该脉冲发射时摆镜的位置,正向为1,反向为0,记录扫描方向发生变化的激光脚点即为条带边界点。
本文采用第一种方法,遍历条带点云数据,提取边界数据点,将海量的点云数据简化为两条边界点集,再将这些边界点按照排列顺序连接,即可获得条带点云的边界线。
1.3 区域划分引导的条带重叠度计算
获取相邻条带的边界数据后,需对重叠区进行区域划分。本文根据航飞所获得的航线数据对重叠区进行带状划分,首先将航线数据等间隔划分为多段,再计算线上每个顶点位置的重叠度。根据微积分原理,当上述间隔足够小时,可认为重叠度计算覆盖了整个重叠区域,这样就有效避免了漏检。
根据上述内插的顶点位置,沿航线作垂线,获取该垂线的直线方程;利用直线方程计算垂线与当前点云条带边界多边形的交点,记为P1、P2,与相邻条带重叠边界线产生的交点记为P3,如图1所示。线段P1P2即为该位置条带的宽度d,线段P2P3为该位置重叠区的宽度L。根据式(1)能直接计算得到该位置的旁向重叠度。遍历航线上的内插顶点,采用上述方法可获得重叠区域每个位置的重叠度。算法流程见图2。
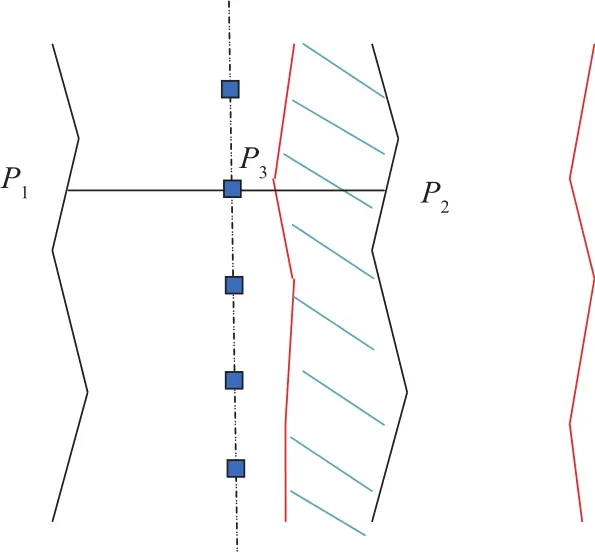
图1 重叠度计算示意图
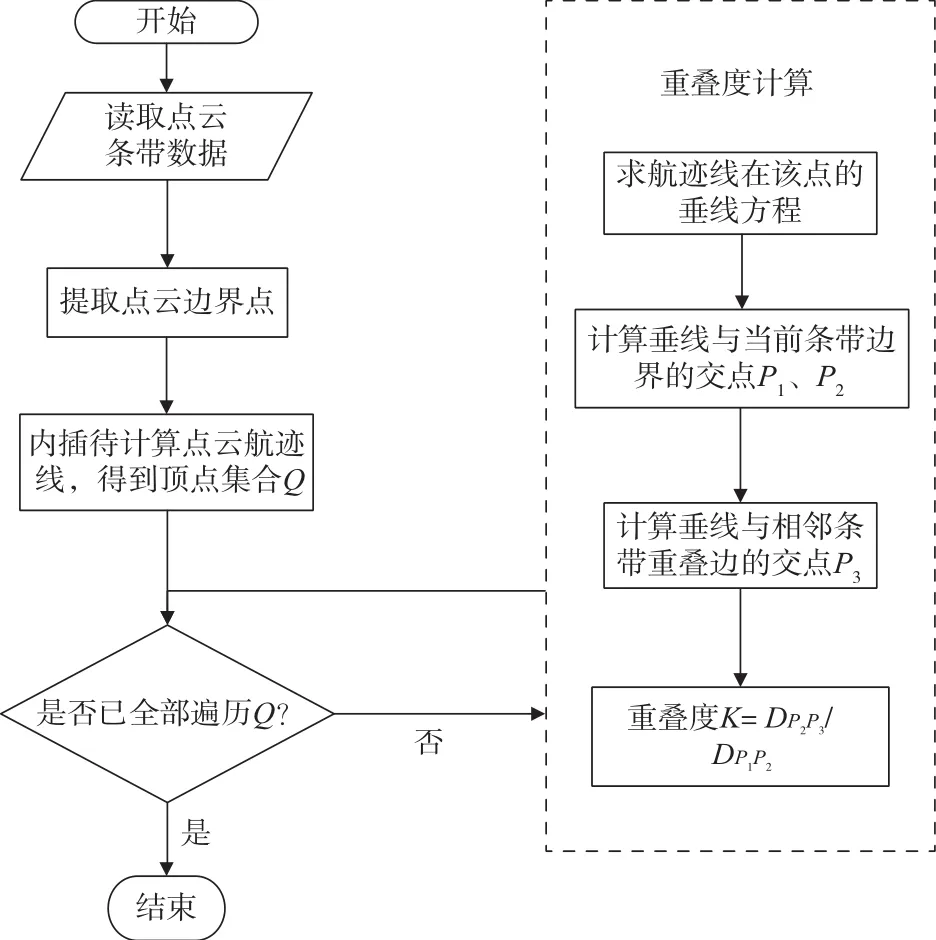
图2 算法流程图
2 实验与结果分析
为了验证本文所述方法的正确性,在VS2010编程环境下,使用C++语言对该算法进行了编程实现,并选取广州某地LiDAR航飞工程采集的实际数据进行实验。
实验数据由Leica ALS 60激光扫描仪采集,预处理后的点云条带长度约为10 km,点云密度约为6个/m2,单个条带激光脚点数量约为50 000 000个。首先对条带数据进行边界点提取,结果如图3所示;然后选取不同的区域划分间隔对相邻两条数据的重叠度进行计算,结果如图4所示;最后根据预设重叠度的合格值判断该条带重叠度是否合格。本文对该组2个条带实验数据的计算时间进行统计,如表1所示。
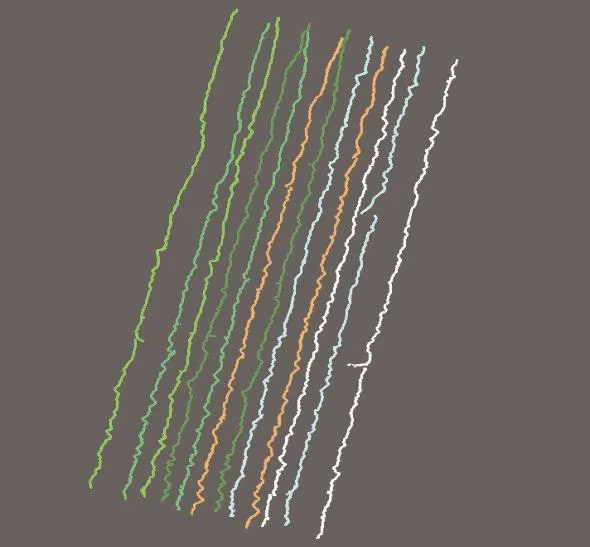
图3 点云边界提取结果
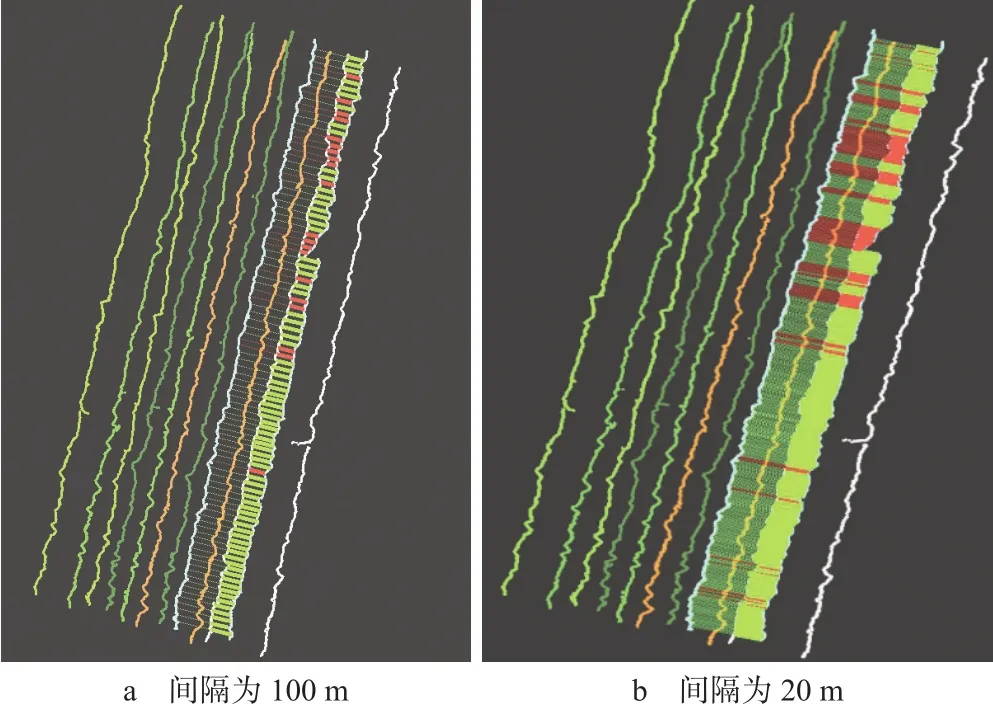
图4 重叠度计算结果

表1 不同参数的计算时间
实验结果表明,本文所述方法能正确计算条带间的重叠度,计算时间与划分区域间隔成反比,但均有较高的计算速度,根据实际应用经验,一般选取100 m的采样间隔即可满足实际质检需求。
3 结 语
本文提出了一种点云重叠度自动检查方法,原理简单,能快速计算并检查海量点云的重叠度指标,替代了人工目视交互、逐条带采样抽查工作,极大地提高了LiDAR航飞数据质量控制和验收工作的效率。同时,该方法也存在一些不足:①检查对象为摆镜式激光扫描仪采集的线状分布激光点,对于其他方式,如旋转棱镜(圆形扫描)还未涉及;②对于特殊的航飞作业,如带状曲线式飞行路线所采集的条带数据还需进一步改进,这些将是下一步的研究目标。