链式气动冲切自动化干红枣去核机设计
2018-11-23康宁波尚梦玉何建国刘贵珊王松磊吴龙国
康宁波,尚梦玉,何建国,,刘贵珊,王松磊,,吴龙国
链式气动冲切自动化干红枣去核机设计
康宁波1,尚梦玉2,何建国1,3※,刘贵珊3,王松磊1,3,吴龙国1
(1. 宁夏大学土木与水利工程学院,银川 750021;2. 宁夏大学物理与电子电气工程学院,银川 750021; 3. 宁夏大学农学院,银川 750021)
红枣去核是干红枣产业深加工的关键技术,现有的红枣去核机普遍存在自动化程度低、人工辅助多、去核机构复杂等缺点。为解决现有的技术问题,该文研究设计了一种链式气动冲切自动化干红枣去核机,整机由单片机程序控制所有工序动作,包括辊轮输送链上料、摄像头拍照检测红枣排布情况、辊轮夹持链定位、间歇时间内气缸驱动旋转插杆去核机构去核和卸料输出。选择横径范围为20~30 mm,纵径范围为35~45 mm的干制红枣去核对象进行样机试验,结果为红枣定位率≥98.3%,去核率≥93.75%,平均破碎率为1.46%。该文设计的链式气动自动化干红枣去核机可实现个体自动定向排布上料、有效去核,同时采用图像检测和机械装置结合技术实现精确定位,降低无效的空冲概率。该研究为进一步完善机械装置的设计,实现机构连续性去核提供了参考。
机械化;设计;自动化;单片机;红枣;辊轮输送链;辊轮夹持链;气动冲切去核
0 引 言
据统计,2016年中国枣树栽培面积达到297万hm2,年产量高达1 000万t,分别占世界种植面积和产量的 98%以上。红枣的精深加工可以极大地丰富红枣产品种类、拓宽红枣的销售渠道,延长红枣的产业化链条,产生良好的经济效益[1]。去核作为干红枣精深加工生产中的一个关键环节,优质、高效、卫生地去核对红枣加工产业的发展有着重要的影响。
国内已有不少企业和学者对红枣去核机进行深入研究并设计了不同原理的机型。如王侯贵[2]提出一种全自动红枣去核机,红枣通过夹持器上料,利用旋转的扶正器定位实现了连续去核的过程,马朝锋等[3-4]提出一种链式红枣去核机的设计,利用U型凹槽链式输送带进行自动上料、定位,曲柄方式驱动去核,该机可靠性较高。史鹏涛等[5]提出一种全自动大枣自动定心去核机,利用上料盘上若干成对可活动的椭圆夹具来上料和定位红枣,对红枣的定位效果比较,此装置结构复杂,上料需要人工辅助。娄飞翔[6]提出一种用于去除枣核的全自动连续去核机,利用带有枣孔的旋转盘对红枣定位,实现红枣连续去核的过程,但上料过程需要人工辅助。张玉峰[7]研究的气动排冲式红枣自动去核机,利用气动方式驱动冲核杆进行去核,上料机构由链式的红枣夹持模具构成,实现上料和去核分布式的控制,但夹持模具结构复杂,定位率不高。刘向东等[8]进行鲜杏单体排序间隔输送装置的设计与试验研究,首次提出鲜杏单体排序定向输送原理,可实现鲜杏无损伤、单体且间隔快速有序喂入,实现自动化去核。
相比国内红枣定向去核的研究,国外对苹果、鲜杏、桃子、橄榄等鲜果的定向去核、切分等加工机理研究技术更为先进和成熟。美国FMC公司推出可自动转矩式粘核桃去核机,该机采用可旋转的小杯实现对桃子的高速定位和输送,在不断旋转下桃子保持直立状态进行定位去核,生产率为800 kg/h[9]。Brown等[10]采用链式锥形滚轮进行水果的定向输送,辊轮通过底部摩擦带自转带动椭球形水果进行自转实现有效的定位。Hendrik等[11]采用机器视觉技术与机械装置实现球形水果定位,该技术通过机器视觉检测判别水果的位置,通过机械装置不断调整达到定向的目的。
综上所述,目前国内所研究的去核机主要针对上料定位机构和冲核驱动方式进行设计。上料定位机构分为链式夹持具和盘式枣孔装置,链式上料定位机构上枣率高,定位率低,而盘式结构上枣率低,定位稳定,使得去核红枣的破损率低;冲核驱动方式分为凸轮曲柄的整体机构和分布式控制的气动冲核独立机构。凸轮曲柄机构运转可靠,但结构复杂且功能扩展性差;分布式控制的方式设计的比较少,控制精度取决于传感电路及控制系统的精度,功能结构扩展性强。国外主要采用水果自旋转的陀螺效应来实现定向排布和加工的,随着计算机技术的发展,通过机器视觉与机械装置的技术结合实现果品精确的定位输送和加工[12-15]。
本文提出一种链式气动冲切自动化干红枣去核机,由单片机程序分布式控制的上料机构、去核机构、摄像头检测控制系统和步进电机组成。采用辊轮输送链机构提高自动上料率,提出气动式去核机构,并通过摄像头检测红枣排布定位情况同步控制去核机构;提出旋转插杆的进刀去核方式,以期提高去核效率、降低破碎率。
1 总体设计方案
1.1 技术要求
本文研究的去核对象是经过分级后干制的和田枣,试验选常规等级的红枣,横径长20~30 mm、纵径长35~45 mm,含水率为35%,含糖量≥75%,设计输送速度为240 mm/s,要求红枣去核机能够自动上料、准确定向、去核高效。样本空间为480个红枣,去核率≥93%,破碎率≤3%。
1.2 系统结构与机构原理
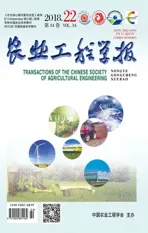
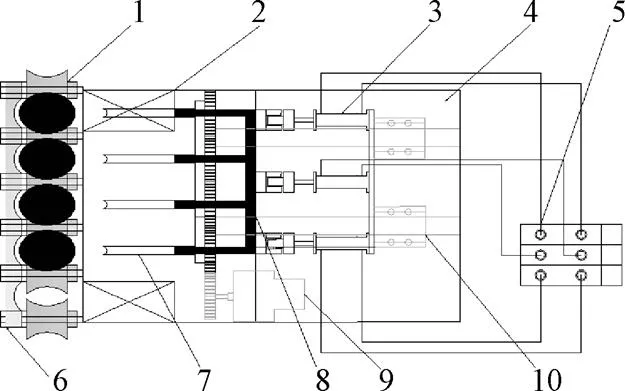
根据技术要求本文研究设计了链式气动自动红枣去核机,主要结构包括辊轮输送链上料和定位机构、嵌入式单片机控制系统、气动式去核机构。其中辊轮输送链上料和定位机构由辊轮输送链、同步辊轮夹持定位链组成[16-21];嵌入式单片机控制系统由STM32F407 主处理器、STM32F103协处理器、沪工LJ12A3-4-Z/BX 三线NPN 传感器和步进电机组成[22-23];气动式去核机构由电磁阀、阻尼气缸、旋转插杆、可调速旋转驱动电机、滑台和空气压缩机组成。如图1所示,整机结构按工序分为上料区、检测区、红枣夹持定位去核区和卸料区。
1.辊轮输送链 2.传感器 3.上料斗 4.STM32F407主处理器和STM32F103协处理器 5.辊轮夹持链 6.气动去核机构 7.枣核出料斗 8.步进电机 9.弹性搓动条
其工作原理为,整机运作由单片机程序控制,红枣通过辊轮输送链运载上料,输送速度设定为240 mm/s,上料斗底部固定的弹性条搓动辊轮不断旋转带动红枣自转,实现个体排布定向输送,STM32F407主处理器的摄像头检测红枣位置,将同步信息传到协处理器,带信息的红枣在去核区由上方的同步辊轮夹持定位;STM32F103协处理器控制步进电机间歇停止,每个间歇运作周期时间为4 s,实现定向红枣与去核机构精准对位;间歇时间内去核机构运作进行去核;去核后的红枣继续由辊轮输送链传送至卸料区,实现全自动化去核全过程。
2 关键机构与参数设计
2.1 辊轮输送机构与参数
2.1.1 力学分析及尺寸参数的确定
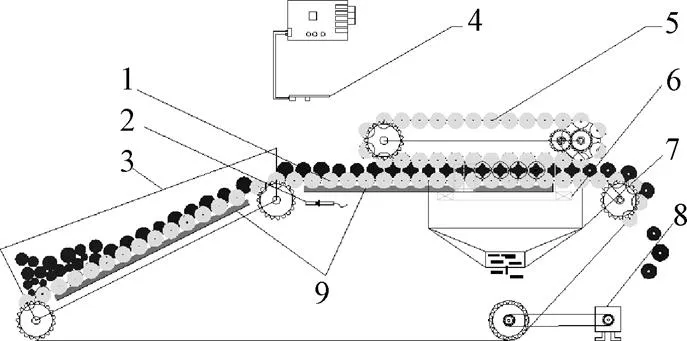
辊轮输送链运行上料时,红枣在辊轮窝中自旋转形成动态平衡。在输送速度为240 mm/s的条件下,红枣排布定向的稳定性受辊轮输送链的上料倾斜度、链条规格、辊轮尺寸参数的影响[22,24-25]。下面对排布定向过程中的红枣进行受力分析,如图2所示。
注:G1、G2为2个凹面辊轮的重心;Z1、Z2分别为2个红枣的几何中心;f1、f2为2个凹面辊轮对红枣1的滑动摩擦作用力,N;F1、F2为2个凹面辊轮对红枣1的支撑力,N;mg为红枣1和2的重力,N;红枣2对红枣1的压力为F3,摩擦力为f3,N;v为辊轮输送链运动的速度,m·s-1;α为凹面辊轮输送平面与水平面夹角(°);θ为红枣1转动轴心与凹面辊轮1、2转动轴心连线的夹角,(°);ω为凹面辊轮1、2自转角速度,rad·s-1;L1为凹面辊轮轴线间距,mm;L2为2个凹面辊轮最小间距,mm;ωz为红枣1自转角速度rad·s-1。
红枣在凹面辊轮窝中稳定条件下,按红枣最大横径尺寸值D=30 mm计算,红枣与辊轮轴心线夹角的关系为

式中2为凹面辊轮最小横径,mm。
输送链匀速运动输送,红枣在旋转辊轮中自旋转,红枣稳定时由于凹面辊轮运行速度与红枣实际的运动速度相同,而凹面辊轮自转动角速度由输送链速度及凹面辊轮尺寸参数确定。红枣在凹面辊轮窝中可等效为刚体,当红枣自转线速度与凹面辊轮转动线速度等值且速率不变时,红枣处于动平衡状态,即根据刚体动态平衡的力学关系得出如下公式
当<α时


当>时


式中ω为红枣1的旋转角速度,rad/s;D为红枣的最大横径,mm。
其中11,22(凹面辊轮为聚酰胺分子材料,经测定知其对红枣的摩擦系数为0.64),相邻辊轮窝中驻留红枣的条件满足:的范围为0~36°,红枣物料的横径区间为20~30 mm;测得红枣物料静态堆积角为21°,可以得出窝中红枣可滚落出多余的条件为:21°<<36°。在保证设计的辊轮输送速度240 mm/s条件下,同时保证辊轮窝中驻留一个红枣的稳定性,要求辊轮间距不宜过大,相邻凹面辊轮窝不宜深。通过理论分析试验校正,确定辊轮链选择10A型双侧耳链条,单链节距为15.875 mm,相邻辊轮轴心线间距1为31.75 mm,辊轮凹面最大横径1为27.5 mm,最小横径2为22.5 mm,相邻辊轮凹面最小间距2为9.25 mm,辊轮长为32 mm,辊轮输送链的水平夹角为28°。
2.1.2 辊轮输送机构设计
整个辊轮输送链采用2条304材质的不锈钢单侧耳链条和157个辊轮组成,通过4组齿轮轴循环转动,可按工序为上料输送区、去核区和出料区。其中上料区包括辊轮输送链、上料斗和弹性搓动条。2条链条中通过侧耳夹装可转动的辊轮,辊轮表面拟合红枣椭圆形状呈U型凹面的旋转体,相邻辊轮间形成辊轮窝。辊轮搓动弹性条由食品级的硅胶皮包裹海绵制成,紧贴输送链辊轮,运行时辊轮被搓动同时带动红枣在辊轮窝中自旋上料,实现个体排布定向[8,24-26]。
2.2 定位机构和机理分析
2.2.1 同步辊轮夹持链尺寸参数
同步辊轮夹持链在装置于去核区辊轮输送链的上方,由2条304不锈钢10A链条和34个U面辊轮组成,辊轮尺寸规格与输送链辊轮相同,水平长度为500 mm,通过同步齿轮传动实现上下辊轮链条同步运转。U面辊轮内部材料采用尼龙注塑,外表由排列凸点的弹性硅胶膜包裹,硅胶膜厚2 mm,凸点厚4 mm,在红枣夹持过程中,上下辊轮面间距最大弹性缓冲量为8 mm,适于横径范围为20~30 mm的红枣,在固定夹持间距条件下确保红枣长径轴心高度一致性,使其高度误差范围在±1.5 mm内,如图3所示。运行原理为,带信息红枣输送到去核区时由上下同步辊轮链进行夹持输送,个体红枣定向夹持在相邻4个辊轮U面形成的空窝腔体内。输送运动过程中,辊轮由弹性搓轮条摩擦旋转,同时带动辊轮窝中的红枣自转,红枣轴向方向进行不断调整,实现个体红枣的准确定向,同时保证在间歇停止时与插杆刀头的定位精度[27-32]。

1.辊轮夹持链 2.辊轮输送链 3.带凸点的硅胶膜
1.Roller clamping chain 2.Roller conveyor chain 3.Silica gel film with convex point
注:1234分别为上下辊轮对红枣的夹持作用力。
Note:12,3and4are the clamping forces from the upper and lower rollers respectively.
图3 辊轮夹持链结构示意图及红枣的受力分析
Fig.3 Schematic diagram of roller clamping chain structure and force analysis of jujube
2.2.2 定向定位机理分析
根据法国物理学家Maupertuis的最小作用量原理,物体的自转轴由其作用两原理决定,运动体系实际发生的真正运动是使某1个作用量取自小值的运动。数学家Hamilton与Lagrange对此项定义做了优化,定义为“在1个动态系统中,在一定的时间间隔内,所有可能发生的运动轨迹路径中,实际的轨迹路径符合最小作用原理”[25]。据此定义,利用欧拉公式来描述辊轮输送链中的红枣最小动量原理的稳定性[25-26]。图4为红枣三维坐标示意图。

注:a、b、c分别为红枣三维坐标系中x轴、y轴、z轴向半径;ωx,ωy,ωz分别为红枣绕3个轴的自转角速度,rad·s-1;Ixx,Iyy,Izz分别为红枣围绕三轴自转的惯性矩,m4。
根据图4所示,建立红枣三维坐标轴向旋转的力矩方程如下

式中M、M、M分别是红枣在以ω,ω,ω角速度围绕三轴自转的力矩。根据对样品红枣尺寸的测量分析,红枣外形椭圆状,以轴和轴为中心线对称,红枣的轴向半径≈<,可以推理得出I>I>I。因此在重力矩的作用下,若红枣绕三轴自转角速度相同的条件下,可得出以下结果。

根据公式
式中为自转角动量,N·m·s;为力矩,N·m。
根据式(12),辊轮输送链斜面上料输送红枣时,在辊轮的同一速度的搓动下以轴为中心自转,红枣处于最小动量原理稳定状态进行运动,因此实现红枣的个体的定向排布。如图3,当处于水平输送位置时,上方的辊轮夹持链对已初步定向排布的红枣进行夹持,红枣个体受上下4个辊轮施加的对称相向的力1、2、3、4作用,同时下方被搓动的辊轮带动红枣和上方辊轮自旋转。由于输送链、红枣和夹持链都处于水平位置,4个辊轮夹持的位置呈几何对称的关系可得出1234,各作用力形成动态平衡关系,进一步加强红枣的定向性。同样基于最小动量原理,成异性不对称的红枣在夹持搓动过程中不断受4个辊轮的夹持力作用,可压缩的枣体逐渐调整为对称体,进一步提高了红枣定向的准确率。
2.3 去核机构的设计
2.3.1 红枣去核冲切的机理分析
干制红枣物性特点是含糖量高,表皮呈干硬化具有一定韧性,枣肉黏性比较高,组织结构具有紧密黏弹性的特点。去核冲切效果和红枣的物性特征有很重要的关系,利用安装去核插杆做检测探头的质构仪,插杆外径10 mm,壁厚0.5 mm,对样枣进行去核穿刺过程的力学测试,对插杆自旋速度为0(静止)的冲切和自旋速度为8 rad/s的冲切去核方式的刀头阻力(红枣剪切应力)应力测试对比,结果如图5。

注:数字1与2代表插杆自旋转速度分别为0与8 rad·s-1。
从图5中可知,不转动的插杆对红枣进行冲切时,刀头冲切阻力(红枣的纵向剪切应力)随时间不断增高,峰值达到21.15 N。刀头自转速为8 rad/s冲切时,刀头阻力随时间不断增高,过程中出现一个峰值,时间末峰值达到最大的9.52 N。由于干制红枣表面有一定的韧性,枣肉具有黏弹性,红枣总体的质构效应使得纵向剪切应力远大于横向剪切应力。当插杆刀头静止状态下冲切,红枣主应力为纵向剪切力,因此冲切阻力比较大。当旋转刀头冲切时,通过旋转方式切破红枣表皮,破坏了表皮和枣肉的总体质构效应,故冲切阻力要小很多[32-33]。通过对红枣冲切过程的物性分析,本文采用以8 rad/s旋转插杆刀头冲切的去核方式,以减小对红枣挤压形变的作用力。
2.3.2 去核机构结构设计
气动式去核机构由电磁阀、阻尼气缸、旋转插杆顶杆套件、可调速旋转驱动电机、滑台组成,如图6所示。设计去核旋转插杆顶杆套件并排安装4个,每个插杆根部由轴承支撑,安装1模31齿传动齿轮,4个齿轮相邻啮合,由调速电机通过齿轮传动驱动4个插杆同时旋转,插杆支撑件安装于滑台上。去核原理为,单片机程序控制辊轮输送链,带信息的红枣由辊轮链夹持输送到去核区,间歇停止实现定向红枣与去核插杆刀头准确对位,协处理触发电磁阀启动阻尼气缸驱动去核机构,旋转插杆刀头由滑台带动径直冲切,气缸反向行程进行退刀,行程末端枣核由插杆内套的顶杆顶出,完成一次去核过程。
1.辊轮链 2.底托支架 3.阻尼气缸 4.固定平台 5.电磁阀 6.挡枣板 7.旋转插杆 8.顶杆 9.转动电机 10.滑台
通过理论和试验分析,本文研究设计的去核刀头为旋转插杆式,如图7所示。插杆外径为10 mm,厚0.5 mm,304不锈钢材质,刀头带刃,顶杆直径为8 mm的304不锈钢材质的实心杆。每个插杆套顶杆可相互滑动,4个插杆一体固定于气缸滑台,4个顶杆一体固定于底托平台。插杆根部装有转动齿轮,齿轮规格为1模31齿,外径为33 mm,相邻两插杆的转动齿轮相互啮合的中心距为31.75 mm。挡枣板上有圆窝和中心窝孔,与辊轮窝位置对应,当插杆冲切红枣时,夹持不住的红枣可由挡枣板作用稳住,冲切插杆顺畅穿孔而过[34]。
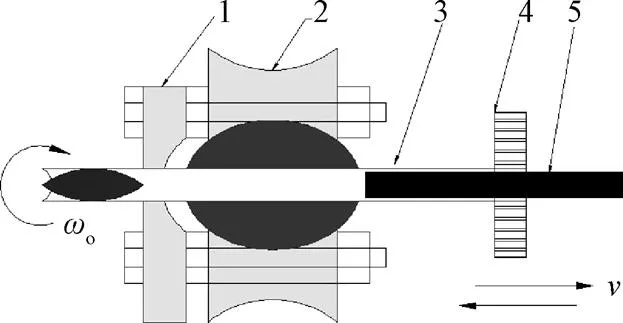
1.挡枣板 2.凹面辊轮 3.旋转插杆 4.传动齿轮 5.顶杆
1.Jujube stop plate 2.Concave roller 3.Rotary inserted rod 4.Transmission gear 5. Ejector rod
注:o为插杆旋转速度,rad·s-1;为插杆冲切速度,m·s-1。
Note:ois the rotating speed of inserted rod;is the punching speed of inserted rod.
图7 去核过程示意图
Fig.7 Diagram of jujube pit removing process
图8为2种插杆进刀方式的干红枣去核效果对比。由图8可知,静止插杆去核的红枣会出现枣肉撕裂、冲偏和枣体挤压变形的情况,主要是由于红枣质构纵向应力比较大,刀头冲切阻力比较大反作用于红枣造成形变。旋转插杆去核的红枣切口平整,枣肉完整和挤压形变量都比较小,整体去核效果比较好。
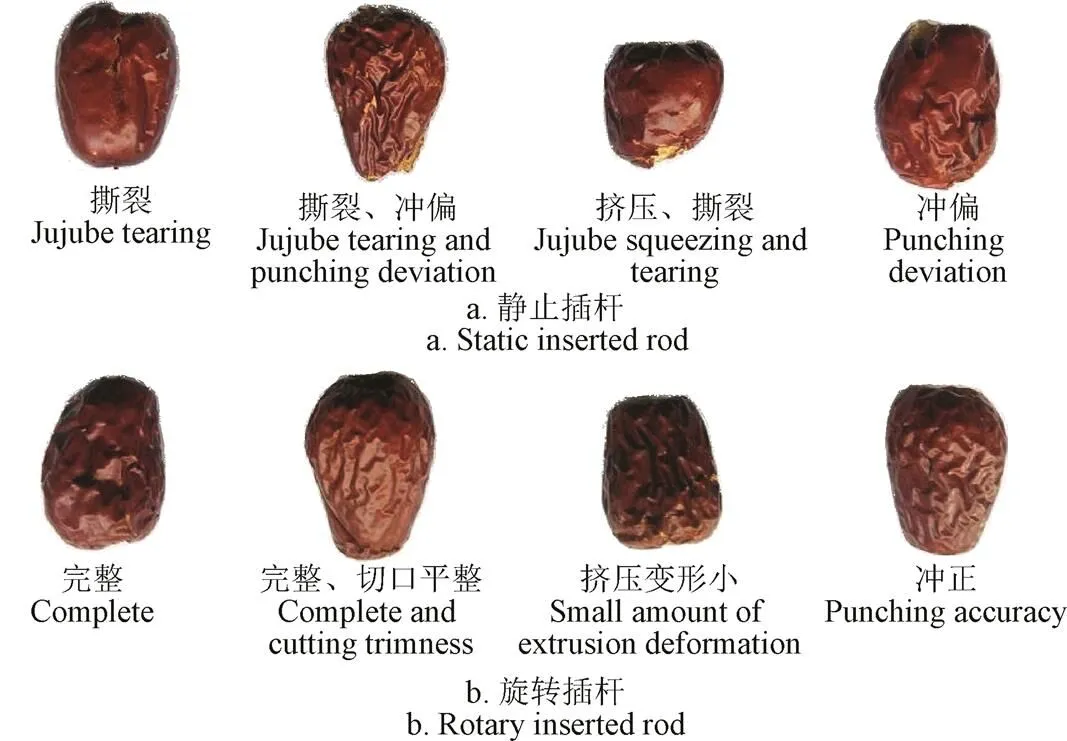
图8 2种插杆进刀方式的干红枣去核效果对比
2.3.3 检测控制系统
本文去核机的检测控制系统是嵌入式单片机系统,由STM32F407 主处理器、STM32F103协处理器、沪工LJ12A3-4-Z/BX三线NPN传感器和HBS860H步进电机组成。STM32F407是基于ARMCortex-M4F内核,集合了微控制器和数字信号处理器的功能与特性,摄像头采用OV7670。STM32F103协理器是基于ARMv7-M体系结构的32位标准RISC处理器,控制步进电机和气动式去核装置的运作[16]。
检测控制原理为,单片机控制步进电机运行辊轮输送链,到检测区接近开关传感器触发STM32F407,通过SCCB总线控制OV7670摄像头进行拍照,通过图像信息检测辊轮输送链上红枣排布情况;同时NPN 传感器将同步信息发送给STM32F407进行计算处理,由STM32F103协处理器控制带息红枣输送到去核位间歇停止,使得定向红枣与去核插杆精确对位,同时控制电磁阀驱动去核杆完成去核;系统控制每隔4个辊轮为一个间歇中止距离,间歇运作周期时间为4 s,即每周期内输送时间1 s和中止3 s,中止时间内控制电磁阀驱动气缸在3 s内完成去核、枣核顶出动作。摄像头逐行扫描检测,连续4个辊轮窝为一个检测单元,若1个检测单元辊轮窝全部空载,则协处理器控制步进电机不间歇中止,同时不执行去核动作;若连续4个辊轮窝载枣不足4个,则检测单元中载枣最前的辊轮窝直接送至最前端的去核顶杆的位置时进行去核,依此循环。去核后的红枣继续由辊轮输送链末端输出完成卸料。
3 样机试验及结果分析
3.1 样机试验方案
手工挑选横径范围为20~30 mm,纵经范围为35~45 mm的干制红枣480颗,分成6组每组80颗,对样机进行去核试验。设计辊轮输送链速度240 mm/s,辊轮夹持链的长度为500 m,步进电机间歇运转时间周期为4 s,去核刀头由4个旋转插杆成排构成,同时对4个定向红枣进行去核,样机设计实例如图9所示,红枣去核机构如图10所示。分别统计红枣排布定向率、去核率、破碎率3项指标数据对样机性能进行评价。
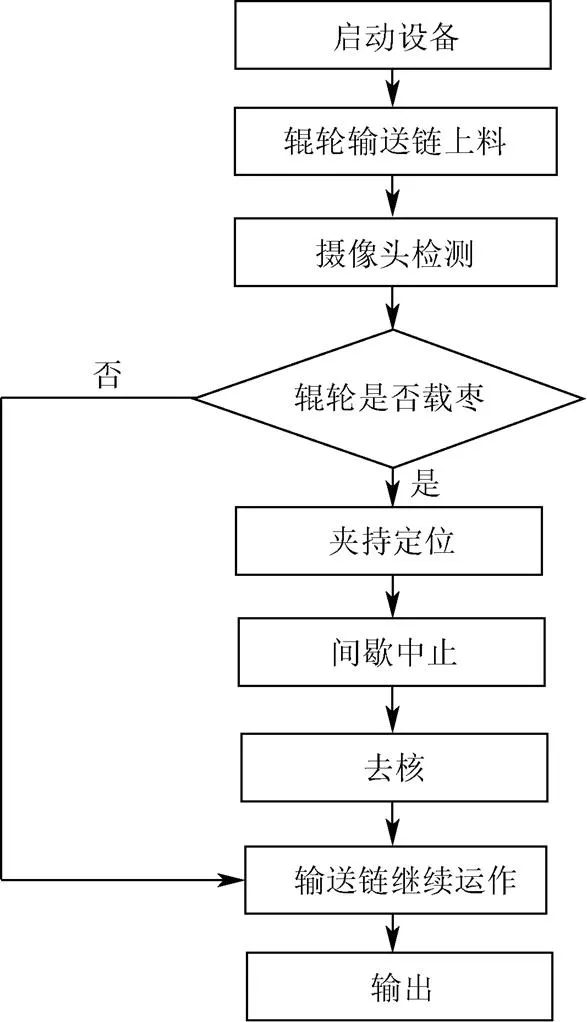
图9 单片机系统控制流程图
3.2 样机试验结果分析
表1为样机去核试验结果,由表1可知,6组样本平均每组红枣排布定向数为78.67颗,平均定向率为98.3%,平均去核数为76.67颗,最低去核率为93.75%,平均破碎数为1.17颗,平均破碎率为1.46%,其中定义定向率公式如下

从试验数据结果分析,样机的辊轮输送链上料个体排布和辊轮夹持链定向效果好,达到设计的目的。去核过程中,红枣的定向效果对去核效果影响比较大,其中有6颗枣属瘦长型,在夹持辊轮中横径面中心偏低,插杆刀头冲切偏向,同时也造成红枣的破碎。旋转插杆的进刀方式冲切阻力较小,在去核过程中红枣的形变量较小,完成去核的红枣切口平整,枣肉撕裂的情况很少,样机的去核率和破碎率达到设计要求。
1.红枣去核机构 2.辊轮夹持链 3.STM32F407主处理器和STM32F103协处理器 4.辊轮输送链 5.传感器 6上料斗 7.弹性搓动条
1.Jujube pit removing mechanism 2.Roller clamping chain 3.Main processor STM32F40 and coprocessor STM32F103 4.Roller conveyor chain 5.Sensor 6.Feeding funnel 7.Elastic strip
a. 链式气动冲切自动化干红枣去核机示意图
a. Diagram of chained pneumatic punching automatic dried jujube pit removing machine
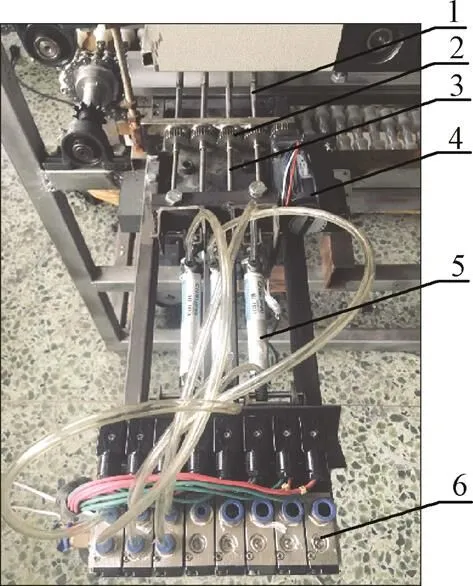
1.旋转插杆 2.传动齿轮 3.顶杆 4.转动电机 5.气缸 6.电磁阀
1.Rotary inserted rod 2.Transmission gear 3.Ejector rod 4.Rotating motor 5.Cylinder 6.Solenoid valve
b. 气动冲切去核机构实物图
b. Pneumatic punching jujube pit removing mechanism
图10 红枣去核整机和关键机构图
Fig.10 Diagram of whole jujube pit removing machine and key mechanism
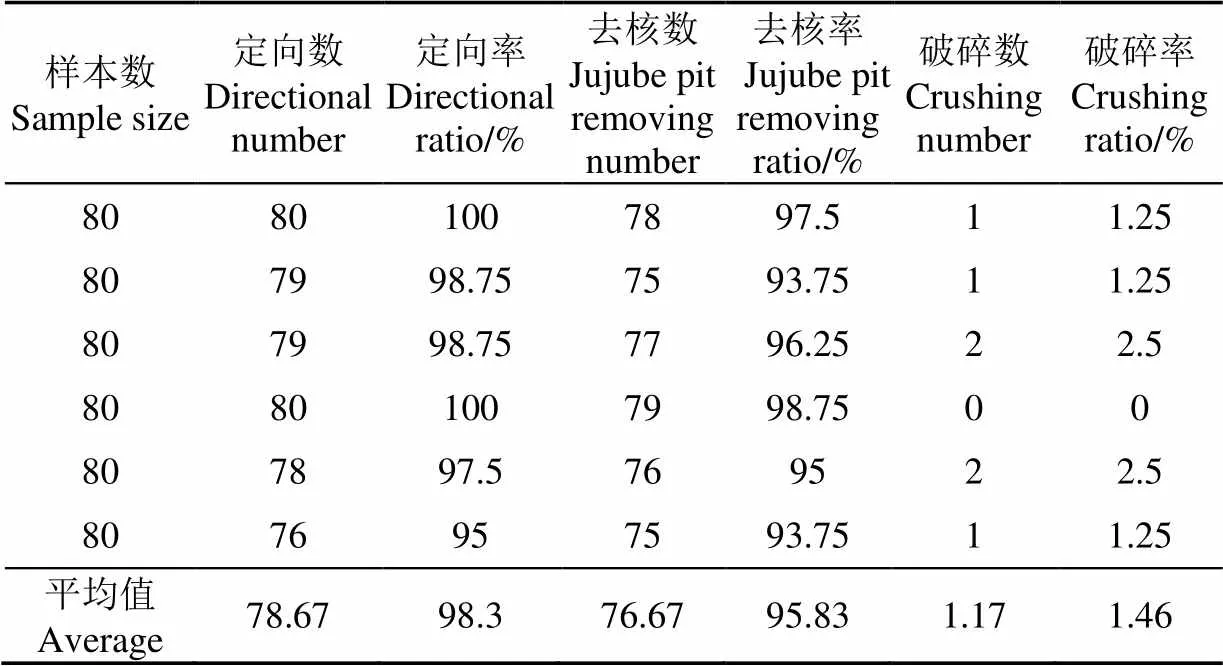
表1 样机去核试验结果
4 结论与讨论
1)本文设计的链式气动自动去核机实现自动上料,快速排布,定位率达98.3%。样本空间为480个红枣的情况下,可以达到去核率≥93.75%,平均破碎率为1.46%。
2)样机的插杆组的4个插杆处于同一水平面,同时辊轮夹持链夹持空间距离相同,因此去核红枣外形尺寸差异不宜过大,比较适合预先分级后的红枣。后续工作针对定位方式研究,升级功能进一步提高对不同尺寸红枣去核的适应度。
采用图像检测和机械装置结合技术实现精确定位,降低无效的空冲概率,但整个加工工序中去核环节限制了去核生产效率。需要进一步考虑机械装置的设计,实现机构连续性去核的目的,提升去核生产效率。
[1] 周靖博,张淑娟,孙海霞,等. 我国红枣去核机的研究现状与发展趋势[J]. 山西农业科学,2014,42(2):199-202.
Zhou Jingbo, Zhang Shujuan, Sun Haixia, et al. Research status and development trend of jujube kernel removing machine in China[J].Journal of Shanxi Agricultural Sciences, 2014, 42(2): 199-202. (in Chinese with English abstract)
[2] 王侯贵. 全自动红枣去核机:202364767[P]. 2012-08-08.
[3] 马朝锋,刘凯,周春国,等. 链式红枣去核机的设计及试验[J]. 农业工程学报,2011,27(5):127-130.
Ma Chaofeng, Liu Kai, Zhou Chunguo, et al. Design and experiment of the chain type jujube kernel removing machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(5): 127-130. (in Chinese with English abstract)
[4] 马朝锋,刘云霞,崔亚辉,等. 红枣去核机对准机构的设计及误差分析[J]. 机械设计,2012,29(5):54-56.
Ma Chaofeng, Liu Yunxia, Cui Yahui, et al. Design and error analysis of alignment mechanism for jujube kernel removing machine[J]. Journal of Machine Design, 2012, 29(5): 54-56. (in Chinese with English abstract)
[5] 史鹏涛,文怀兴,王宁侠,等.一种全自动大枣自动定心去核机:102551176[P]. 2012-07-11.
[6] 娄飞翔. 一种用于去除枣核的全自动连续去核机:205794744[P]. 2016-12-14.
[7] 张玉峰. 气动排冲式红枣自动去核机的研究[J]. 农产品加工,2016,12:66-68.
Zhang Yufeng. Study on pneumatic percussive red jujube automatic denucleation machine[J]. Farm Products Processing, 2016, 12: 66-68. (in Chinese with English abstract)
[8] 刘向东,王学农,王春耀,等. 鲜杏单体排序间隔输送装置的设计与试验[J]. 农业工程学报,2016,32(12):31-38.
Liu Xiangdong, Wang Xuenong, Wang Chunyao, et al. Design and test on transmitting device for fresh apricot with single fruit rank in certain interval[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(12): 31-38. (in Chinese with English abstract)
[9] Technologies FMC.FMC Technologies[EB/OL]. http://www.fmctechnologies.com
[10] Brown A I, Ristow P E, Walters D R. Roller for orientation of fruit:US4,730,719[P]. 1988-03-15.
[11] Hendrik Jacob, De Dreef. Device for orienting a number of similar objects, such as fruits:US6,691,854[P]. 2004-02-17.
[12] 张洪国,袁东阁,关建行,等. 分级式红枣自动去核机传动系统设计与仿真[J]. 食品工业,2016,37(3):227-230.
Zhang Hongguo, Yuan Dongge, Guan Jianhang, et al. Classification type automatic red jujube pitter drive system design and simulation[J]. The Food Industry, 2016, 37(3): 227-230. (in Chinese with English abstract)
[13] 时明明,孔晓玲,刘素梅,等. 红枣去核机构的设计及仿真[J]. 中国农机化学报,2016,37(12):111-115.
Shi Mingming, Kong Xiaoling, Liu Sumei, et al. Design and simulation of jujube kernel removing mechanism[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(12): 111-115. (in Chinese with English abstract)
[14] 周改梅. 红巧自动分级去核切片集成技术与设备的研究[D]. 西安:陕西科技大学,2016.
Zhou Gaimei. Research on Automatically Grading, Pitting and Slicing Integrated Technology and Equipment for Jujube[D]. Xi’an: Shaanxi University of Science and Technology, 2016. (in Chinese with English abstract)
[15] 王小爱,陈海峰. 全自动红枣去核机传动系统设计[J]. 安徽农业科学,2011,39(20):12550-12557.
Wang Xiao’ai, Chen Haifeng. Transmission system designing of full auto red dates pitter[J]. Journal of Anhui Agriculture, 2011, 39(20): 12550-12557. (in Chinese with English abstract)
[16] 张彤阳,葛正浩,李冬冬,等. 转盘式全自动红枣去核机的设计[J]. 农机化研究,2015,37(5):105-108.
Zhang Tongyang, Ge Zhenghao, Li Dongdong, et al. Design of the rotating disc type jujube kernel removing machine[J]. Journal of Agricultural Mechanization Research, 2015,37(5): 105-108. (in Chinese with English abstract)
[17] 文怀兴,李新博,史鹏涛,等. 大枣去核切片集成设备的设计与试验[J].食品与机械,2013,29(3):145-156.
Wen Huaixing, Li Xinbo, Shi Pengtao, et al. Design and test of a pitting and slicing integrated device for jujube[J]. Food & Machinery, 2013, 29(3): 145-156. (in Chinese with English abstract)
[18] 时明明,周洁,金瑶,等. 小型红枣去核机料斗机械振动装置设计及仿真分析[J]. 食品与机械,2016,32(7):76-79.
Shi Mingming, Zhou Jie, Jin Yao, et al. Design and simulation analysis of the hopper mechanical vibration device for small jujube kernel removing machine[J]. Food & Machinery, 2016, 32(7): 76-79. (in Chinese with English abstract)
[19] 刘蒋龙,张淑娟,周靖博,等. 一种单工位红枣去核机去核结构的仿真分析研究[J]. 现代食品科技,2016,32(9):154-160.
Liu Jianglong, Zhang Shujuan, Zhou Jingbo, et al. Simulation analysis of a single-station jujube pit-removing machine[J]. Modern Food Science and Technology, 2016, 32(9): 154-160. (in Chinese with English abstract)
[20] 周靖博. 一种新型红枣去核机的设计与仿真[D]. 晋中:山西农业大学,2014. Liu Xiangdong. Design and Simulation of a New Type of Jujube Pit Removing Machine[D]. Jinzhong: Shanxi Agricultural University, 2014. (in Chinese with English abstract)
[21] 张学军. 枣去核机传动系统槽轮机构的虚拟样机分析[J]. 农产品加工,2016,8:39-42.
Zhang Xuejun. Red jujube to nuclear slot wheel mechanism of the virtual prototype machine transmission system analysis[J]. Farm Products Processing, 2016, 8: 39-42. (in Chinese with English abstract)
[22] 康宁波,强锋,吴龙国,等. 基于电磁式同步执行机构的鲜枣分级机设计与试验[J]. 农业工程学报,2017,33(6):254-260.
Kang Ningbo, Qiang Feng, Wu Longguo, et al. Design and experiment of synchronization actuator system based on electromagnetism for fresh jujube classifier[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(6): 254-260. (in Chinese with English abstract)
[23] 王松磊,刘民法,何建国,等. 红枣自动快速无损检测分级机研究[J]. 农业机械学报,2014,45(9):79-83.
Wang Songlei, Liu Minfa, He Jianguo, et al. Study of rapidand automatic non-destructive testing grader for redjujubes[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9): 79-83. (in Chinese with English abstract)
[24] 关建行. 链板式红枣自动去核机关键零部件的优化设计[D]. 泰安:山东农业大学,2015.
Guan Jianxing. Optimization Design of Chain Plate Type Automatic Red Jujube Pitter’S Key Components[D]. Tai’an: Shandong Agricultural University, 2015. (in Chinese with English abstract)
[25] Tasch Uri, Narayanan Priya, Lefcourt Alan, et al. Apparatus and method for orienting rotatable objects: US 2006/ 0225582A/[P]. 2006-10-12.
[26] 刘向东. 鲜杏定向切分去核机理及装置试验研究[D]. 沈阳:沈阳农业大学,2016.
Liu Xiangdong. Studies on Mechanism and Equipment of Orientating and Halving and Pitting of Fresh Apricots[D]. Shenyang: Shenyang Agricultural University, 2016. (in Chinese with English abstract)
[27] 杨一,周靖博,张淑娟. 红枣去核机传动系统中主轴的有限元分析[J]. 农机化研究,2015,37(10):19-23.
Yang Yi, Zhou Jingbo, Zhang Shujuan, et al. The finite element analysis of the spindle of transmission system of the jujube pit removing machine[J]. Journal of Agricultural Mechanization Research, 2015, 37(10): 19-23. (in Chinese with English abstract)
[28] 王旭东,李长友,张韶回,等. 荔枝去核机的设计[J]. 农业机械学报,2005,36(9):167-170.
[29] 李明,邓干然,连文伟,等. 龙眼鲜果剥壳脱核机的试验研究[J]. 农业工程学报,1999,15(2):221-225.
Li Ming, Deng Ganran, Lian Wenwei, et al. Experimental research on decorticating and pitting machine of fresh longan[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1999, 15(2): 221-225. (in Chinese with English abstract)
[30] 李长友,马兴灶,程红胜,等. 荔枝定向去核剥壳机设计与试验[J]. 农业机械学报,2014,45(8):93-100.
Li Changyou, Ma Xingzao, Cheng Hongsheng, et al. Design and experiment of litchi denucleating and decorticating machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 93-100. (in Chinese with English abstract)
[31] 王春耀,梁勤安,闵磊,等.水果输送过程中定向机理的分析与试验[J]. 农业工程学报,2012,28(20):95-98.
Wang Chunyao, Liang Qinan, Min Lei. et al. Analysis and test for orientation mechanism in fruit transportation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 95-98. (in Chinese with English abstract)
[32] 程红胜,李长友,鲍彦华,等. 荔枝柔性去核刀具的设计与试验[J]. 农业工程学报,2010,26(8):123-129.
Cheng Hongsheng, Li Changyou, Bao Yanhua, et al. Design and experiment for flexible cutter of litchi denucleating machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(8): 123-129. (in Chinese with English abstract)
[33] 范登峰. 柑橘剥皮机去顶环切装置设计与试验研究[D]. 武汉:华中农业大学,2016.
Fan Dengfeng. Design and Experiment of Top Removing and Ring Cutting Device for Reticulate Citrus Peeling Machine[D]. Wuhan: Huazhong Agricultural University, 2016. (in Chinese with English abstract)
[34] 谢海军,卿艳梅,郑丁科,等. 气动式龙眼去核装置的设计与试验[J]. 农业工程学报,2006,22(7):211-213.
Xie Haijun, Qing Yanmei, Zheng Dingke, et al. Design and experiment of a longan core-removing mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(7): 211-213. (in Chinese with English abstract)
Design of chained pneumatic punching automatic dried jujube pit removing machine
Kang Ningbo1, Shang Mengyu2, He Jianguo1,3※, Liu Guishan3, Wang Songlei1,3, Wu Longguo1
(1.,,750021,; 2.,750021,; 3.,750021,)
Jujube pit removing is the key technology of dried jujube deep processing. Currently, it is very common that the dried jujube pit extractor has a lot of defects. We designed a chained pneumatic punching automatic dried jujube pit removing machine to solve the existing technical problems. The whole machine was composed of a chain roller for feeding, a camera for collecting the images of jujubes transmitted on the conveyor, locating mechanism, and a jujube pit mechanism with spinning inserting rod driven by an intermittent cylinder. All of them were controlled by an embedded microchip. The feeding mechanism was mainly supported by a rolling conveyor chain. The locating mechanism worked in conjunction with the feeding mechanism. The lower conveyor chain of the feeding mechanism and the upper roller of the locating mechanism consisted of a synchronous clamping and a locating roller device. The dried jujube pit removing machine was made up of a magnetic valve, a driving damping cylinder, sets of rotary inserting rods and knockout rods, a speed-regulating rotary driven motor, a sliding table, and an air compressor. The embedded microchip controlling the whole jujube pit removing system was formed by STM32F407 image processor, STM32F103 coprocessor, Shanghai LJ12A3-4-Z/BX 3-way NPN sensor and HBS860H stepping motor. The whole structure could be divided into 3 parts according to the operating process, which included the jujube feeding area, the detecting area, and the clamping and jujube pit removing area. Under the programmatic control of microcontroller, the jujubes were transported by the chain roller. The elastic strip was fixed at the bottom of the feeding hopper, and the rubbing roller rotated to realize the individual directional arrangement of the jujube. The camera was adopted for image detection of the automatic alignment of the jujubes, and collected synchronous information from the camera was transmitted to the coprocessor and analyzed timely. The jujube with location information was conveyed to the jujube pit removing area, and the jujube was clamped by the synchronous roller. The coprocessor controlled the stepper motor to achieve directional intermittent stop and realize accurate alignment of the jujube in the jujube pit removing area. The inserted rods were launched and completed the jujube pit removing promptly in the transitory pause. Dried jujube pits were carried unceasingly by the roller conveyor chain and output directly. And the whole operating circle of the automatic jujube pit removing was completed. The dried jujubes used in the test were those whose diameter ranged from 20-30 mm and longitudinal ranges from 35-45 mm. The result showed that the average directional ratio was 98.3%, jujube pit removing rate was at least 93.75%, and the average crushing rate was 1.46%. In this paper, the automatic feeding jujube pit extractor achieved high efficiency of feeding jujubes one by one, meeting the demand of accurate detection and location. And it realized fast and efficient dried jujube pit removing and smooth unloading. According to the test results, the chained pneumatic punching automatic dried jujube pit removing machine adopted the chained roller conveying mechanism to realize the automatic orientation and feeding of the jujubes individually. The elastic bump roller which fit the size, shape and other characteristics of the dried jujube reduced the central height error of different sizes. The image detection working with the upper and lower roller clamping device were controlled by the embedded microchip to achieve high precision of locating and reduce the probability of invalid jujube pit removing operation at the same time. The whole machine realized the purpose of automatic feeding, accurate location and effective jujube pit removing.
mechanization; design; automation; single chip; jujube; roller conveyor chain; roller clamping chain; pneumatic jujube pit removing
康宁波,尚梦玉,何建国,刘贵珊,王松磊,吴龙国. 链式气动冲切自动化干红枣去核机设计[J]. 农业工程学报,2018,34(22):19-26. doi:10.11975/j.issn.1002-6819.2018.22.003 http://www.tcsae.org
Kang Ningbo, Shang Mengyu, He Jianguo, Liu Guishan, Wang Songlei, Wu Longguo. Design of chained pneumatic punching automatic dried jujube pit removing machine[J]. Transactions of the Chinese Society of Agriculture Engineering (Transactions of the CSAE), 2018, 34(22): 19-26. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.22.003 http://www.tcsae.org
2018-07-06
2018-09-17
农业科技成果转化项目(2014G30000045);国家自然科学基金资助项目(31560481)
康宁波,博士生,主要从事农产品无损检测,农田水利方面的研究。Email:109438847@qq.com
何建国,教授,博士生导师,主要从事农产品无损检测和食品物性学方面,节水灌溉方面的研究。Email:hejg@nxu.edu.cn
10.11975/j.issn.1002-6819.2018.22.003
S24; S226.9; S665.1
A
1002-6819(2018)-22-0019-08