GPS/INS组合导航技术
2018-11-17刘志谢焱鑫张宏宏黄旭
刘志 谢焱鑫 张宏宏 黄旭
摘要:全球定位系统(GPS)与惯性导航系统(INS)是目前研究的较多的导航方式,在诸多方面具有互补性。两者结合,能克服缺点,提高导航精度。本文主要介绍了GPS/INS的几种组合方式,对其前景进行展望。
关键词:全球定位系统 惯性导航系统 组合导航
惯性导航系统(INS)是利用陀螺仪、加速度计等惯性器件,通过测量运动目标的加速度来得到速度和运动距离,从而给出目标的瞬时速度和位置数据。INS不依赖外界信息,输出信号连续、频带宽、噪声相对较低,但导航参数会随时间飘移。全球定位系统(GPS)是全球、全天候、高精度的卫星导航系统,优点多,应用广。但是也有以下的缺点。一方面,GPS得到的导航参量噪声相对较大,信号易受干扰,受到干扰的情况下,会导致定位精度下降,更严重时导致GPS不工作。另一方面,当载体处于高速运动状态时,如果超出GPS接收机动态范围,信号接收会失锁。此外,相比于惯导而言,GPS数据更新频率低,信号噪声大,实时性较差,不能对高速运动的载体提供连续的导航参量。所以,基于GPS的导航方法的系统都是比较脆弱的。GPS与INS组合,既能保证实时性的要求,又能提高准确性和可靠性,是目前常用的组合方法。
目前,对于GPS/INS组合导航系统的研究主要集中在组合方式和数据融合两方面。根据组合导航系统的结构,信息融合的方式以及融合的程度,它可以分为松组合、紧组合,超紧组合(深组合)三种模式。
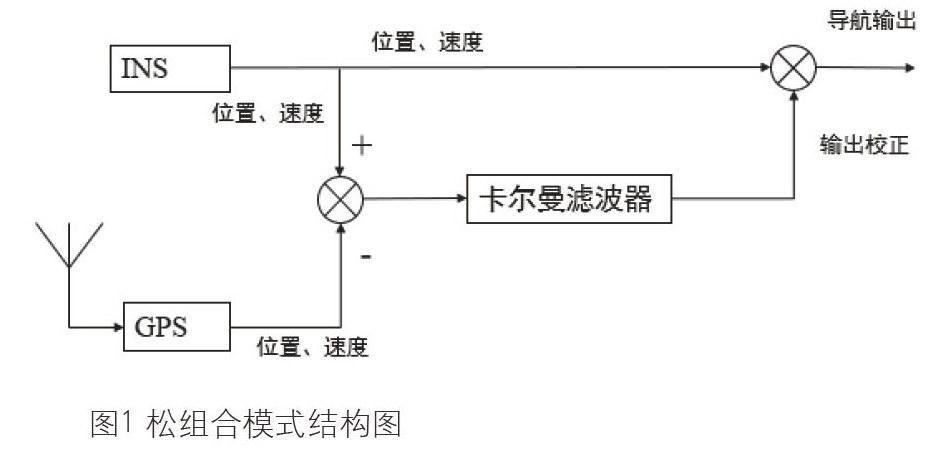
图1是典型的松组合模式结构图,是最基本的组合方式。该组合方式将GPS输出的位置、速度和INS得到的位置、速度做差,并将差值作为滤波器的输入,滤波器的输出对INS进行反馈校正或输出校正。该组合方式的优点在于计算量较小,工程上实现简单;两子系统均可以独立工作,独立性较强,某一系统故障时,仍然有一个系统可以提供导航信息。其缺点是GPS工作时可见卫星数量至少四颗,GPS的导航输出与时间相关,导致卡尔曼滤波器稳定性差。
紧组合方式使用GPS接收机和INS的伪距、伪距率的差值作为组合滤波器的观测量,因此又称为伪距,伪距率组合。在此组合方式中,GPS利用INS信息辅助卫星捕获及加快选星过程,也可以利用修正的INS数据和原始的INS信息辅助GPS的跟踪回路。因此一般情况下,紧组合导航精度更高。该系统的缺点在于紧组合牺牲子系统的独立性来提高导航精度,需要进行星历计算与延迟误差补偿,计算量大,实时导航能力有所下降,实现较为复杂。其优点在于可见卫星数目小于四颗时,在短时间内可以保持较高精度,同时也没有量测输入相关问题。
在高动态、弱信号等恶劣环境中,无论松组合还是紧组合,GPS接收机无法稳定跟踪卫星信号,致使组合导航系统无法工作。因此提出了深组合,也称为超紧组合,这是耦合程度最深的一种组合方式,其主要标志是用惯导信息辅助GPS接收机跟踪回路。深组合的优势有以下几点:组合滤波器把GPS/INS的数据融合和GPS信号跟踪集成与一体,这样就使得GPS在弱信号、高动态情况下的性能有所提高;此外,利用INS导航输出辅助GPS,提高了GPS的等效带宽。基于以上优点,深组合成为当前研究的热点,但是深组合模式将改变现有的GPS接收机和INS系统的硬件结构,工程实现将比其他组合方式复杂。
GPS/INS组合导航具有很多优点。从经济方面来说,高精度惯导价格昂贵,采用低精度的惯导就可以达到较高的导航定位精度,能够减少成本,又能提高定位精度,军事、民用應用前景广阔。同时,GPS/INS组合导航可以广泛应用于武器平台和运行体精确定位、测速和导航;也可以应用于精确制导武器,提高打击精度。目前无人机发展迅速,GPS/INS组合导航与无人机上契合度较高,对于提高精度降低成本来说,具有较强的现实意义。
GPS/INS组合导航不仅实用性很高,目前也有不少此方面的研究;而且发展潜力巨大,使该技术在各国备受支持。该组合导航方式精度的提高主要与INS的精度有关。目前,微机电系统(MEMS)和干涉型光纤陀螺(IFOG)技术不断进步,制作工艺日益成熟,使INS精度不断提高。长远的看,MEMS将在未来应用中占有很大的比重。GPS/INS将在航空航天、国防及民用市场发挥更大的作用。
