小型固定翼无人机自主起飞控制系统
2018-11-16刘洪丹权申明程建华王春华
孙 蓉, 刘洪丹, 权申明, 程建华, 王春华
(1. 哈尔滨工程大学 自动化学院, 哈尔滨 150001; 2. 中国人民解放军92956部队,辽宁 旅顺 116041)
0 引 言
近年来,随着高新电子技术的飞速发展,无人机(Unmanned Aerial Vehicle,UAV)在我国被更多人熟知,并有越来越多的科技工作者以无人机为载体进行各种实验与研究[1]。如今,无人机被广泛应用于军事侦察、靶标演练、防灾救援、航空拍摄、物流快递、农业基础建设当中,具有极为广阔的市场和前景。
从小型无人机的应用领域来看,无人机的作用已经从最初地以电子爱好者为主的娱乐研究拓展到了救援、航拍方面,甚至已经在物流和农业植保方面异军突起。我国的基本农田面积高达18亿亩,广大农民在喷洒农药时,仍使用传统方式[2]。数据显示,每年有将近10万人因农药而中毒,其中,农药致死率约高达20%。而采用无人机进行作业,作业效率可提升30倍,且对农药作业者的损害几乎降低为零,同时也降低了劳动人员成本[3]。
无人机主要形式有多旋翼、固定翼、直升机等;根据动力来源的不同,可将无人机分成油动型、电动型、混合动力型等[4]。这些类型的无人机各有特点,在不同的工作环境及工作任务下,发挥着各自的长处,其中油动机续航能力一般较电动机的时间长,旋翼机具有可垂直起降、运动灵敏度、悬停的独特优势。
固定翼无人机比旋翼型无人机续航能力更长,水平飞行速度更快,可完成远距离、大载重的飞行任务[5]。研究表明,固定翼无人机较载人机的气动系数高了3倍之多,其机外形与大部分客机、战斗机等机种类似。因此,对固定翼无人机的研究,也可广泛应用于客机、战斗机中去,这个特点也成为了固定翼无人机一直深入研究的主要因素。
飞机起降过程平均所占时间只有整个飞行时间的2%~3%,然而在飞机事故统计中,有60%~70%的事故发生在飞机起降阶段[6]。这两个数字对比之下,便能发现飞机起降控制技术对飞机安全飞行的重要意义。因此,对固定翼无人机起飞阶段自动控制技术的研究不仅能指导其自主起飞,同时也能为载人机的安全起飞提供研究基础。现有固定翼无人机自主起飞的相关文献中,多是对系统进行仿真分析,而忽略了实际飞行实验的重要性,因此,本文的工作很有意义[7-9]。
1 自主起飞控制系统实现方案
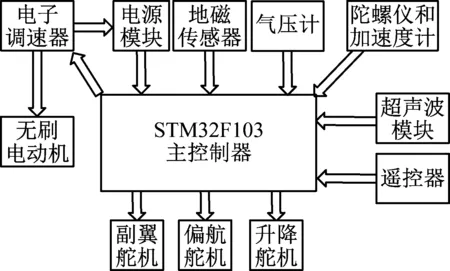
自主起飞的实现需要制作无人机机架,根据系统要求选型无人机所需无刷电动机与舵机并安装。根据系统所需的主控芯片和传感器以及外围电路,设计固定翼无人机飞控电路板[10]。同时,还需进行遥控器控制下的飞行测试,以验证各模块的性能。该固定翼无人机除机架外,无刷电动机作为无人机飞行的主动力执行元件,锂聚合物电池提供电能,电子调速器作为无刷电动机驱动模块。同时,超声波模块和气压传感器采集高度信息,陀螺仪和加速度计敏感无人机载体的姿态角以及角运动,主控制器根据控制算法,解算出当前状态及计算出目标状态,通过升降舵机、偏航舵机、副翼舵机对无人机姿态进行调整,以实现固定翼无人机自主起飞过程中姿态的稳定控制。图1为固定翼无人机硬件平台结构。
2 硬件设计
2.1 电动机与电源设备选型与参数
电动机作为整个系统的执行元件,其性能直接影响着系统的控制效果,通过对控制系统的分析,对主无刷电动机和舵机进行选型,并根据电动机参数选择合适的电源(动力电池)和电子调速器,以适应电动机的特性。
无刷电动机具有体积较小,质量较轻的特点,同时输出转矩较大,非常适合航模使用。同时该电动机本身几乎没有励磁损耗和碳刷损耗,节电率可高达20%~60%,电能使用效率高,从而延长续航时间。主电动机选用无刷电动机,型号为:朗宇无刷电动机X2820,具体参数:定子外径28 mm、定子厚度20 mm、轴径5 mm,质量143 g、空载电流1.1 A、最大持续电流52 A/30 s,KV值为920。该款电动机采用新型桨座设计,便于拆卸,同时电动机轴采用隐式,使得电动机更加安全,0.2 mm厚度的铁芯,电动机工作时温度更低,大大提升了电动机效率。其中,KV值是衡量电动机扭力性能的一种参数,根据KV值的定义,将KV值乘以输入的电压值,就是无刷电动机的空转极速。通常来说,同等情况下,内转子电机的空转极速大于外转子,但是当安装了螺旋桨之后,内转子电机的极速会降低到空载极速的30%~40%,而外转子电机的极速仍能能保持在空载极速的60%~70%。在内转子无刷电动机中,为了能提供较大的力矩,需要增大电流,因此电机速度降低,而外转子电机扭力较大,因此,外转子无刷电机非常适合航模飞行中。该无刷电动机的KV值为920,其额定电压为11.1 V(3 s),在额定电压下其空载转速可达1 0000 r/min。
该型号电机配合桨叶型号为APC13x6.5,这种搭配下,可以使桨、电机发挥更大的优势,获得更高的螺旋桨效率。螺旋桨直径为26 cm,螺距为6.5 cm。高速旋转的螺旋桨产生拉力,常称螺旋桨单位时间所作功为螺旋桨的有效功率N,其值为飞行速度v与螺旋桨的拉力P的乘积。
模拟舵机作为执行器,舵机一般由控制电路、电机、舵盘、减速器、位置检测这几部分组成。舵机控制电路将输入的连续PWM信号转换成所要达到的角度,当位置反馈的角度与目标角度一直时,直流电动机停止转动。舵机体积较为紧凑,稳定性好,且控制简单,是航模中桨叶角度控制的理想电机。
(1) 翼/副翼、方向舵。选用辉盛S90型号电机,自身质量10 g,可输出力矩为1.5 kg·cm,响应时间为0.3 s/60°,自身质量轻,容易控制。该舵机为模拟舵机,输入信号为周期20 ms的PWM矩形波,当输入高电平时间为1.5 ms时,舵机位于中间位置。其摆动角度范围为0°~180°,对应输入高电平时间为0.5~2.5 ms。
(2) 升降舵。因为升降舵所需力矩较大,选用S3010舵机,该舵机自身质量为41g,输出力矩高达6.5 kg/cm,响应时间为0.16 s/60°,满足系统要求。该舵机为模拟舵机,输入信号为周期20 ms的PWM矩形波,当输入高电平时间为1.5 ms时,舵机位于中间位置。其摆动角度范围为0°~180°,对应输入高电平时间为0.5~2.5 ms。
为了使电机和电子调速器达到最大电流的输入,选用的电池为航模常用的3S 2200mah 30C锂电池,该电池的额定输出电压值为11.1 V,最大持续输出电流值高达66 A。电池电芯为锂聚合物,这种新型电池具有质量轻,零记忆效应,可充电次数多等优点,但电池的容量仍然是电动无人机续航时间最重要的制约因素。
电子调速器,简称电调。该电调持续输出电流可达60 A,最大电流80 A(不小于10 s),满足电机对电流的要求,同时内部自带欠压、过压、过热、遥控器信号丢失保护,为系统的安全性提供了有力的保障。电调的作用是将控制器输出的PWM信号,转换为频率可变的三相交流电,供给无刷电动机。同时,该电调具免电池电路(Battery Elimination Circuit,BEC)输出功能,中文名为,可将电源电压稳压在5 V,供给飞行控制系统,其BEC输出电流可达5 A,可驱动主控芯片以及舵机、其他外设正常工作。同时,电子调速器还具有以下功能:① 安全上电保护功能:接通电源后,为避免造成误伤,不会马上启动电动机;② 电压温度异常保护功能:当电调处于异常状态,如:欠压/过压/过热时,通过降低输出功率或者不启动,对设备进行自我保护;③ 遥控器信号丢失保护功能:当丢失遥控器信号2 s后,自动关闭信号输出。
2.2 飞控电路板设计
通过Altium Designer软件进行电路原理图的绘制和PCB电路板的布局、走线设计。飞控电路板包括了STM32主控模块、电源部分、SWD下载调试部分、模拟/数字电压转换部分、气压计、MPU6050三轴陀螺仪与加速度计、MS5611地磁场传感器、LED显示部分、硬件复位部分、遥控器信号接收部分、电机输出部分、串口接口、两个超声波接口、OLED液晶屏显示模块,同时预留了GPS模块接口[11]。所设计的飞控电路板原理图如图2所示。主控芯片选用STM32F103RCT6,该款芯片的硬件资源非常丰富,SRAM为48 K,FLASH为256 KB,8个16位计时器,通用计时器有4个,基本计时器和高级计时器各有2个,2个DMA控制器,1个USB接口,1个CAN总线,串口数为5个,IIC总线数为2个,SPI总线数为2个,可通过SDIO接口读取SD卡,通用IO口数目也高达51个。
3 控制算法设计与仿真
自主起飞阶段控制器的输出量为升降舵舵角、偏航舵舵角、副翼舵舵角,为了实现稳定控制,结合自动控制原理和现代控制理论知识,对以上几个量进行闭环控制。在飞行的校正中使用经典的PID控制器,其具有简单可靠、参数易调整、通用性高、鲁棒性强的特点[12-13]。对常用的PID控制器执行流程和参数设定进行介绍,图3为PID控制器方框图。
3.1 俯仰角控制器设计

起飞阶段俯仰角反馈回路如图4所示。
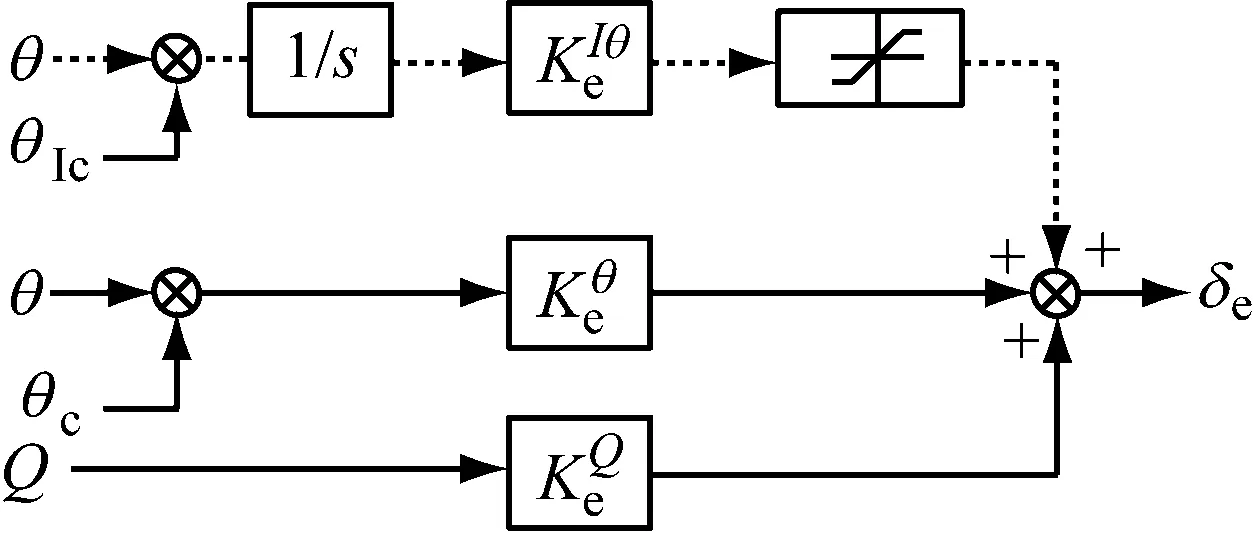
图4 起飞阶段俯仰角反馈回路
3.2 滚动角控制器设计

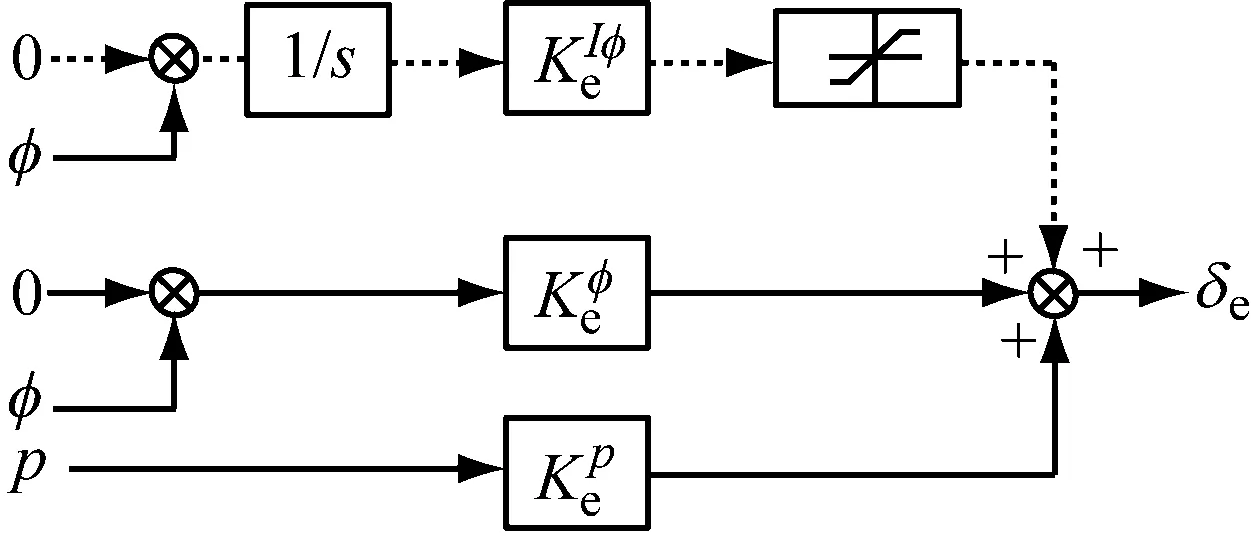
图5 起飞阶段滚动角反馈回路
3.3 偏航角控制器设计

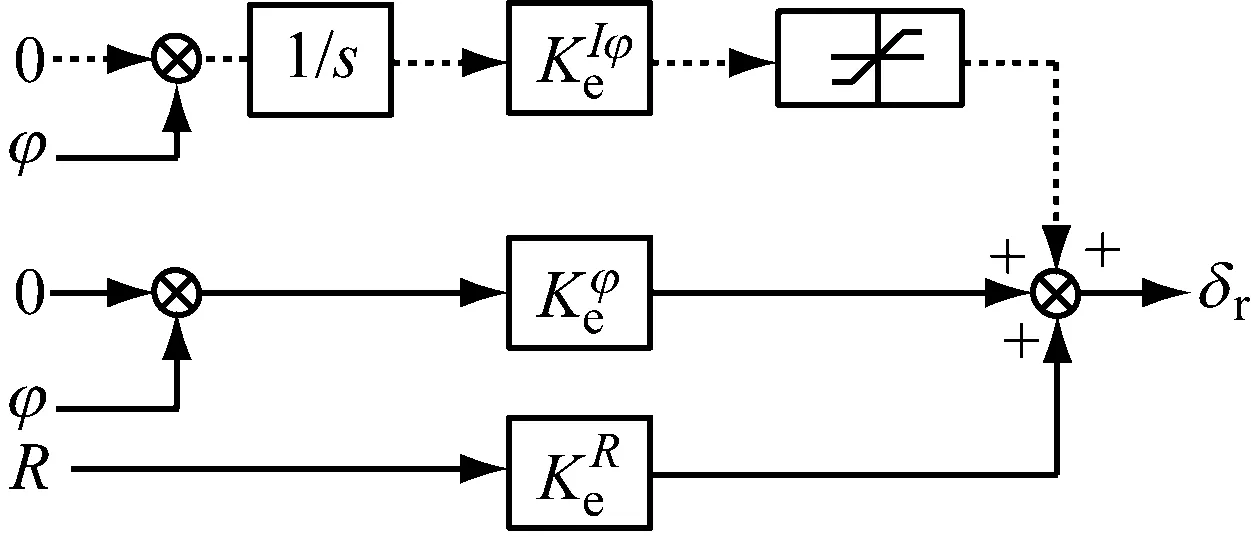
图6 起飞阶段偏航角反馈回路
4 系统测试
4.1 系统测试结果
根据Matlab/Simulink仿真模型中,PID控制器的设计,运用C语言所学知识对无人机自主起飞平台进行自主起飞控制算法的编程、调试。选择空旷的操场进行多次实物飞行试验,调节系统控制器参数,优化无人机自主起飞控制效果。在实际飞行试验时,为了将数据采集分析,使用预留的串口接口与无线模块相连接,编写程序,在PC端串口助手接收数据并保存,使用Matlab软件绘制曲线图,如图7~11所示。
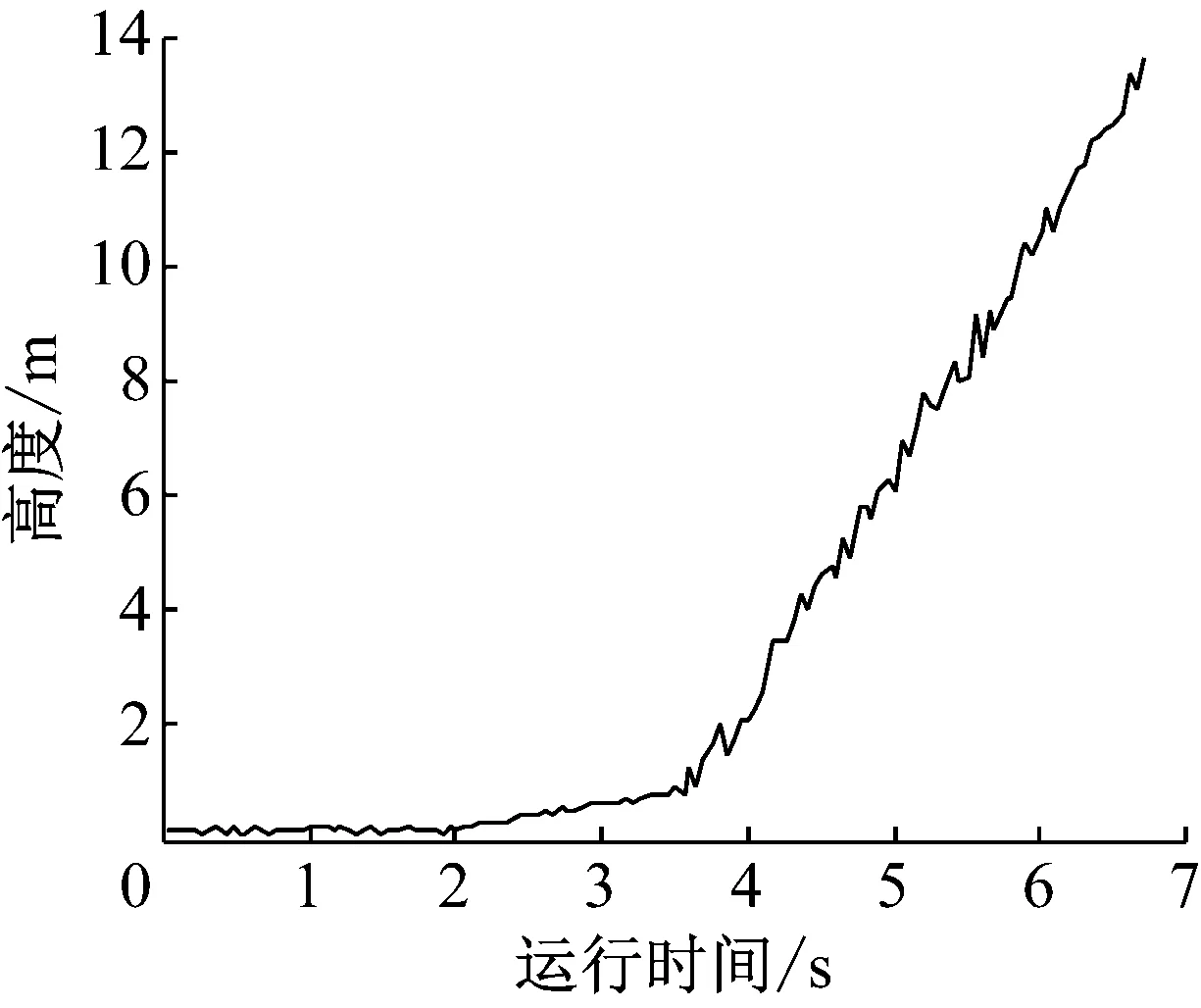
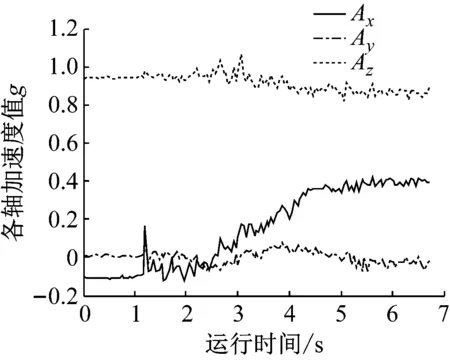
图8 无人机实际飞行加速度计采集数据
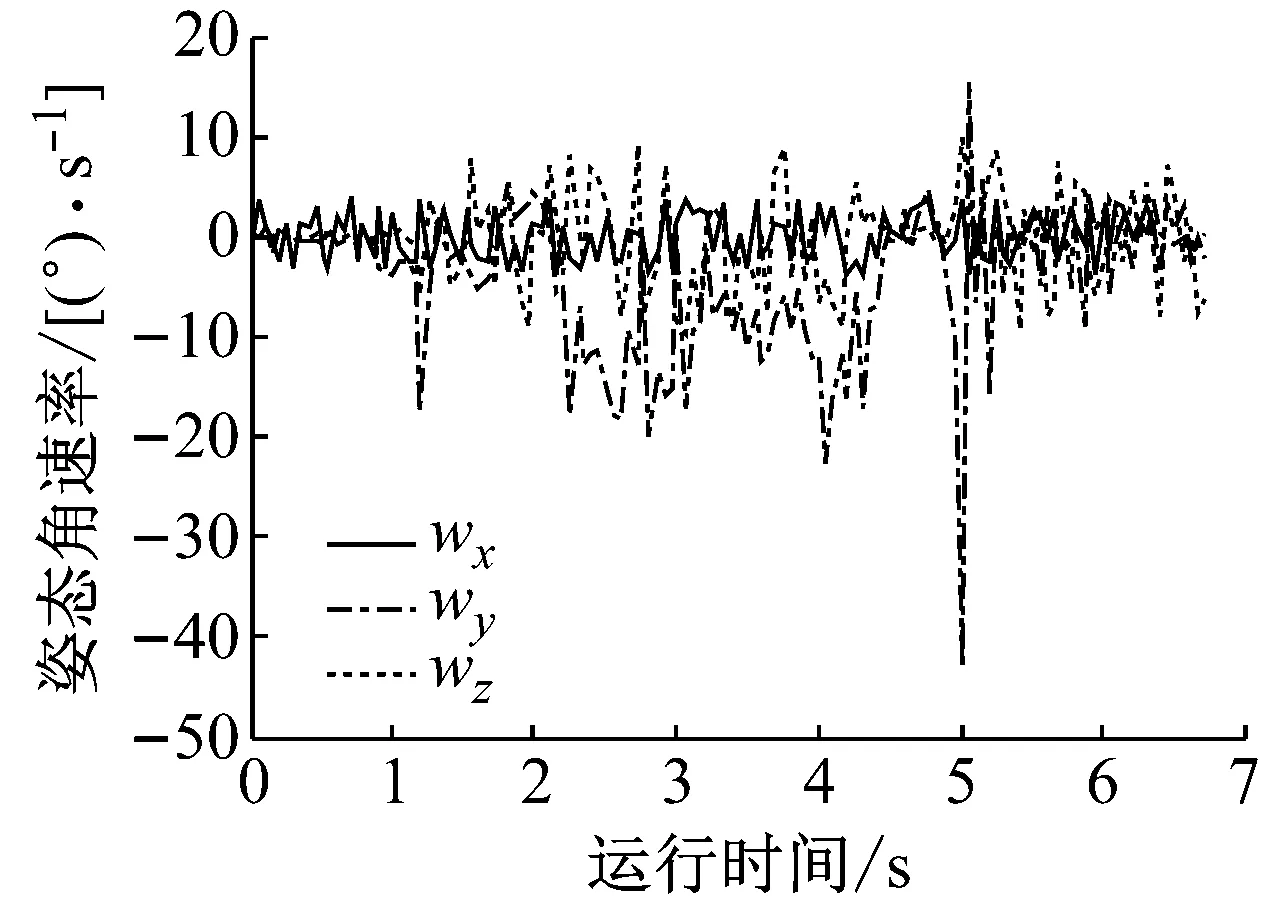
图9 无人机实际飞行角速度采集数据
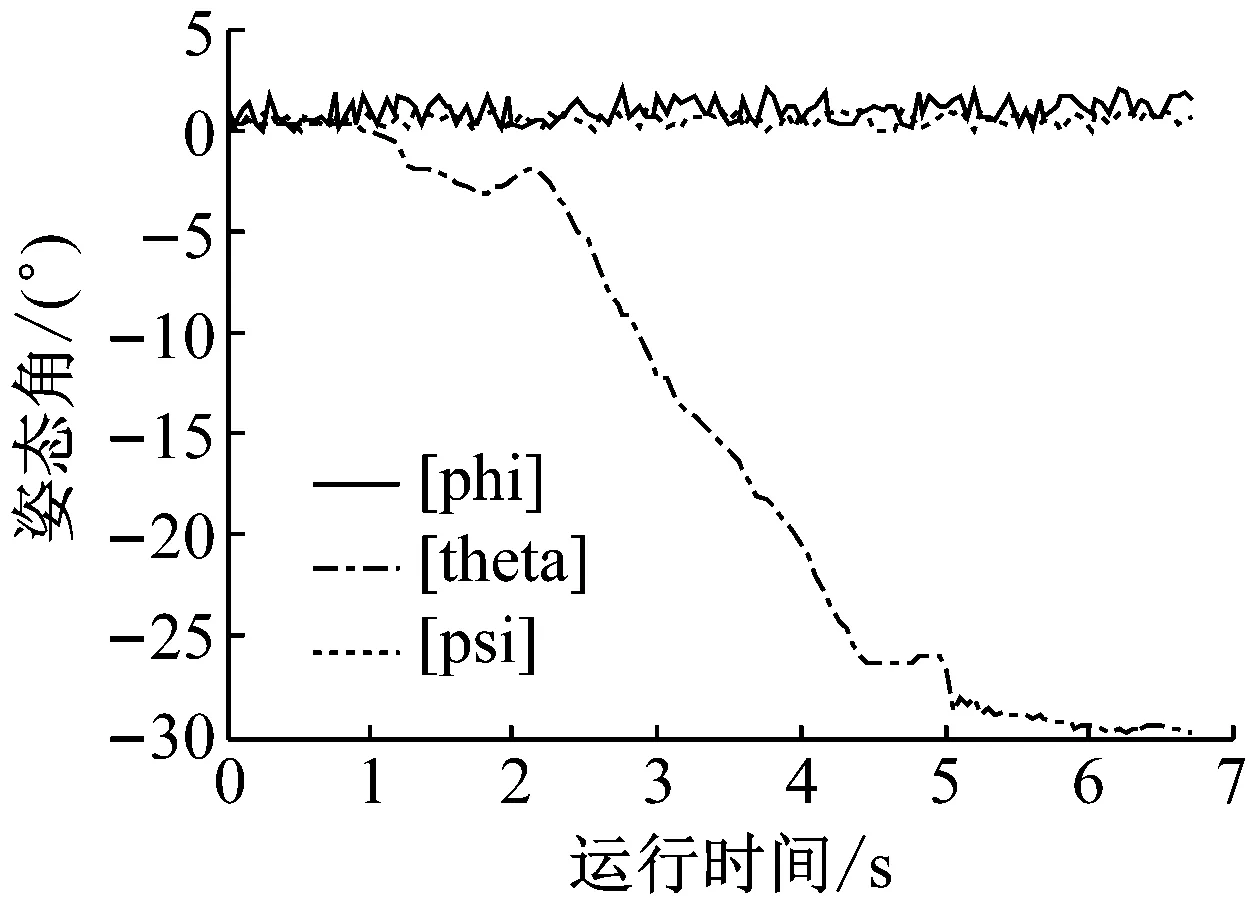
图10 实际飞行姿态角采集数据
经多次实验,使用风速仪测试风速,在风速为5~8 m/s情况下,无人机迎风自主起飞。无人机在2 s时前轮离开地面,机身稍稍抬起,此时俯仰角约为3°,之后速度继续增加;到3.6 s时,无人机后轮离开地面,此时俯仰角大小为17°,继续加速进入爬升阶段,当达到13 m高度时,自主起飞阶段结束,此时无人机俯仰角为30°。
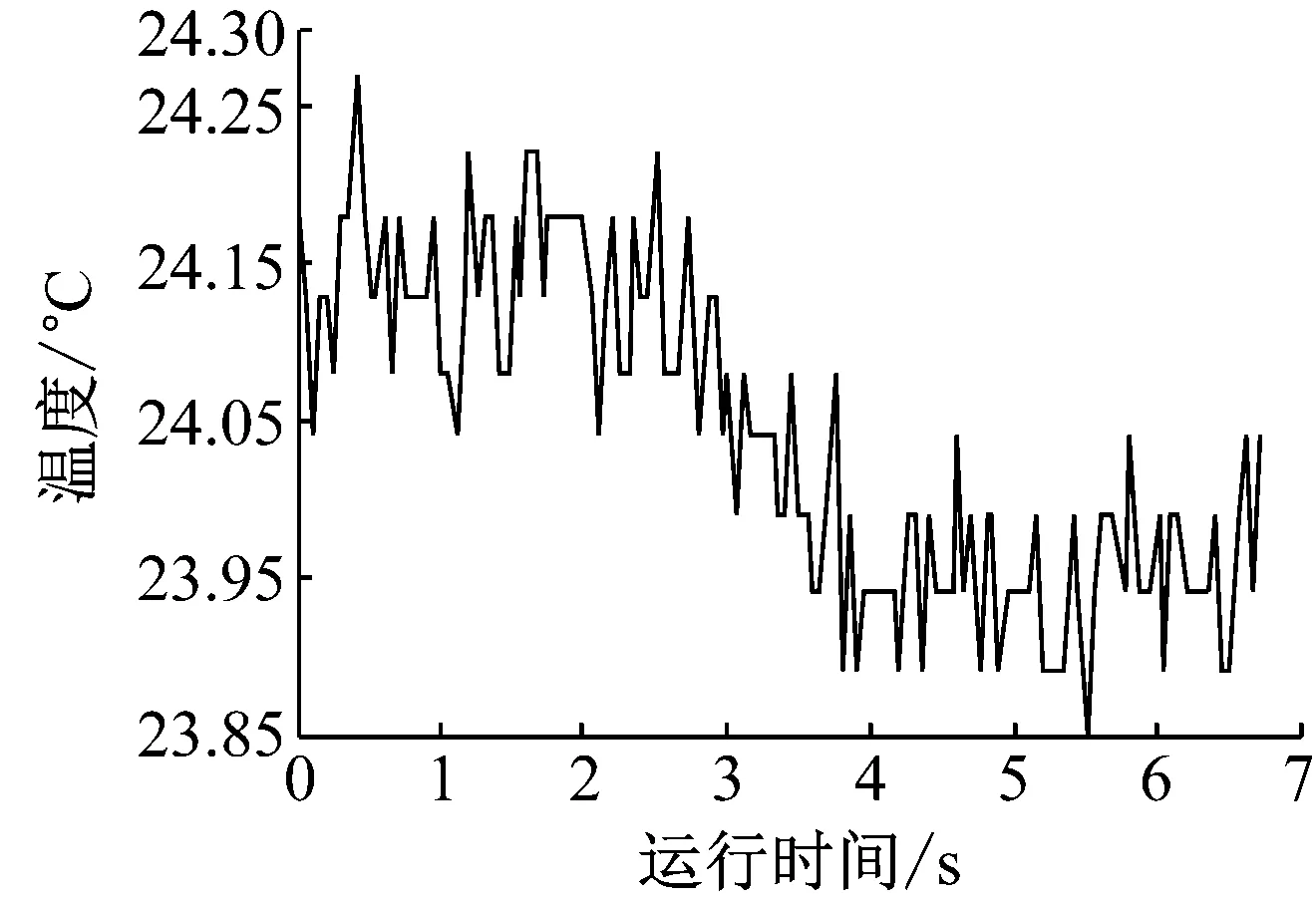
图11 实际飞行温度采集数据
4.2 测试误差分析
调试结果与理论分析和建模仿真存在偏差,经多次实验、分析与总结,本系统中的误差来源主要有:
系统参数测量与实际值存在误差,对转动惯量、惯性积、距离、质量等关键参数的测量存在误差,这些主要来源于测量方法或者测量工具的误差。
无人机在自主飞行时,存在的干扰因素难以精确建模,同时,系统建模时存在一些非线性因素,为了简化模型,进行了假设和线性化,同时,在系统实际调试中,存在大量滞后、延迟环节,导致无人机最终模型的相角裕度较小,系统会出现小幅震荡。
在飞行控制系统中,传感器对无人机姿态的测量存在误差,测得数据受温度、震动等因素的影响,电机高速转动时产生的强磁场,以及无人机机架的震动,都会对传感器采集数据造成干扰,滤波算法也只能减弱这种影响,并不能完全抵消。
主电动机、各舵机响应速度、精度特性的测量等存在误差,电机的死区并未得到完全补偿,或补偿过度。随着电机工作时间的加长,通电产生的热量使电机发热,同时,无人机飞行过程中电池电量逐渐降低,也会使得电机特性产生一定的变化。
5 结 语
本文针对小型固定翼无人机自主起飞阶段建模困难、控制复杂、非线性耦合等问题,对无人机起飞阶段进行动力学和运动学分析,建立滑跑起飞方式的动力学和运动学模型,设计自主起飞控制算法,并制作无人机作为算法验证对象。通过大量实验,验证了起飞阶段控制律的有效性,通过无人机自主起飞平台的系统测试,验证该控制系统的可行性和稳定性。
