传感网中UWB和IMU融合定位的性能评估
2018-11-13段世红
段世红 姚 翠 徐 诚 何 杰
(北京科技大学计算机与通信工程学院 北京 100083) (材料领域知识工程北京市重点实验室(北京科技大学) 北京 100083) (duansh@ustb.edu.cn)
无线传感器网络(wireless sensor network, WSN)由大量传感器节点组成,是一种全新的信息获取和处理技术,在现实生活中得到了越来越广泛的应用,如军事领域中实时监视战场状况、生态领域中环境监测和生物种群研究、工业领域中建筑物安全状况的检测等.其中的许多监测信息需要附带相应的位置信息,因此传感器网络中节点位置信息的获取至关重要.无线传感器网络最简单的定位方法是为每个节点装载全球定位系统(global positioning system, GPS)接收器[1],用以确定节点位置.但是由于经济因素、节点能量制约以及GPS对部署环境有一定条件的限制,导致这种方案的可行性较差.目前采用最多的定位方法是基于测距的方法[1],比较主流的3种测量方法:1)基于时间的方法,包括基于信号到达时间(time-of-arrival, TOA)的方法[2-3]和基于信号到达时间差(time-difference-of-arrival, TDOA)的方法[4-5];2)基于到达信号角度(angle-of-arrival, AOA)的方法[6-7];3)基于接收信号强度(received signal strength, RSS)的方法[8-9].超宽带(ultra-wideband, UWB)由于其准确的延迟分辨率,能够提供精确的TOA到达时间估计,因此在传感网定位系统中应用广泛[10-11].然而,UWB测距方法容易受到多径效应和节点间相对几何位置关系的影响.近年来,惯性导航作为一种辅助定位方法能够补偿UWB的多径效应和几何拓扑问题,嵌入传感器的惯性测量单元(inertial measurement units, IMU)如加速度计、陀螺仪、磁力计等能够提供一系列连续的惯性信息,从而提高定位精度[12-13].本文提出了一种UWB和IMU融合定位方法,将UWB测距信息以及IMU的惯性信息融合起来,来定位传感网中的目标节点.
在定位过程中,由于信号在传输过程中会受到噪声、干扰、多路径等随机现象的影响,节点的位置估计会存在不确定性,从而影响定位精度.定位系统性能评估标准主要有几何精度因子(geometric dilution of precision, GDOP)[14-15]、克拉美罗下限(Cramer-Rao lower bound,CRLB)[16-18]、后验克拉美罗下限(posterior Cramer-Rao lower bound,PCRLB)[19-20],其中CRLB比较常用.文献[16]提出了基于CRLB的线性定位估计问题,给出了最小CRLB的推导过程;文献[3,17]给出了UWB测距系统中基于TOA方法的位置估计误差下限,得出在不存在多径的理想情况下,CRLB与UWB脉冲宽度及信噪比(signal-to-noise ratio, SNR)有关;文献[18]提出了在传感网中一种基于半定理编程的节点定位算法,目标节点(target node, TN)的位置信息可以由锚节点(anchor node, AN)的位置信息及其他惯性信息(如加速度和方位角)来确定,并进一步导出了相应的CRLB.
然而CRLB仅仅关注空间状态下相对位置间的关系对定位目标精度的影响,忽略了时间信息,如文献[18],不能满足定位系统中对时间评估的要求.PCRLB考虑了时域信息[19-20],可以作为定位系统性能的另一个评价标准;文献[19]将基于无线电定位的位置估计、惯性传感器测量和随机游走模型结合起来,推导了用于惯性传感器增强的移动定位的PCRLB;文献[20]使用混合的射频(radio frequency, RF)和图像处理定位技术来定位胶囊内窥镜检查中的胶囊位置,以PCRLB作为性能评估的框架,实现了毫米级的定位精度.
基于以上分析,本文首先介绍了无线传感网融合定位系统中状态转换和测量模型,然后推导了CRLB和PCRLB,最后进行了实验仿真.实验结果表明,本文提出的融合定位方法具有更好的时空定位性能,更能接近实际应用的理论精度下限.
1 无线传感网融合定位系统建模
我们将UWB测距系统与惯性测量单元IMU结合,用来定位随机移动模型中节点的位置.
令ck=(P,N)T=(xPk,yPk,xNk,yNk)T表示移动节点在状态k时的状态向量,其中k=1,2,…,K,K为总观察数.(xPk,yPk)表示世界坐标空间中节点的2D坐标;(xNk,yNk)表示节点移动方向的标准向量.令zk表示移动节点在状态k时的测量向量,则该系统的状态方程和观测方程被定义为

(1)
其中,qk表示过程误差,即基于IMU惯性测量单元的误差,服从协方差为Q的高斯分布;rk表示测量误差,即UWB测距的误差,服从协方差为R的高斯分布;矩阵Ak和矩阵Hk分别表示状态转移矩阵和测量关系矩阵,分别为

(2)
其中,dk表示基于IMU惯性测量单元测得的步长;

(3)

算法1. 传感网融合定位系统中的卡尔曼滤波.
① 初始化z1,c1,P1,令c1=z1;
② fork=1,2,…,Kdo
④ 预测误差协方差先验估计:
⑤ 更新旋转矩阵:R=RRkR-1;
⑥ 计算卡尔曼增益:
⑧ 更新误差协方差后验估计:
⑨ end for
2 性能评估
最初无线传感网的定位性能由CRLB进行评估,其中的观察结果彼此独立,反映了空间状态下相对位置间的关系对定位目标精度的影响.然而考虑到时域信息,观察结果之间的独立性不再存在,当前状态移动节点的位置信息需要该节点在前一状态的位置信息来判断,即通过先验信息得到后验信息,因此引入了后验CRLB,即PCRLB.

2.1 误差分析
基于UWB和IMU的融合定位方法也会产生一定的误差.基于UWB测距定位方法在测量目标节点与锚节点之间的距离时由于环境干扰等因素会造成测距误差;基于IMU惯性器件(如加速度计、陀螺仪等)的定位方法在定位过程中会获得一系列惯性信息如加速度、角速度等,将这些惯性信息进行姿态解算[21]可以获得目标节点的步长信息以及角度信息,由于惯性信息本身存在误差,因此获得的步长信息以及角度信息也会存在误差.由此我们可以得出,基于UWB和IMU的融合定位方法的误差来源主要有:UWB的测距误差以及IMU的步长误差和角度误差.
假设状态k时目标节点TN的坐标为mk=(m1,k,m2,k)T;第n个锚节点AN的坐标为an=(a1,n,a2,n)T,n=1,2,…,N,其中N为锚节点的个数.目标节点的状态转移图如图1所示.假设目标节点的状态信息矩阵为m=(m1,m2,…,mK)T,K为总的状态数,对于状态信息矩阵中的每一个元素可以得到:
mk=mk-1+dkwk+rk,
(4)
其中,dk为状态k到状态k+1时节点的移动步长,wk=(cosφk,sinφk)T表示节点的移动方向,rk表示由步长误差和角度误差造成的整体误差.

Fig. 1 State transition of the target node图1 目标节点的状态转移
基于IMU惯性测量单元测得的步长估计可以表示为

(5)
其中dk为实际步长:

(6)

基于IMU惯性测量单元测得的角度估计表示为

(7)
其中φk为实际角度:

(8)

除了基于IMU惯性测量单元获得这些位置信息之外,我们还可以基于UWB测距方法测得目标节点与锚节点之间的距离估计:

(9)
其中sn,k为目标节点TN和第n个锚节点AN之间的实际距离:
(10)

2.2 空间性能评估:CRLB


(11)
其中J(mk)为费舍尔信息矩阵,在定义费舍尔信息矩阵之前,我们先定义联合概率密度函数:
(12)

其中:

(13)

(14)

(15)
根据式(12),我们可以得出费舍尔信息矩阵中的元素:

(16)
将式(12)~(15)带入式(16),可得费舍尔信息矩阵:

(17)
其中,

(18)

(19)

(20)
2.3 时间性能评估:PCRLB
如本节开头所说,不考虑时域信息时,CRLB最常用于提供系统性能的理论下限.利用后验信息如步长和角度,再加上时间信息,我们可以将CRLB扩展到PCRLB.在推导PCRLB之前,我们先定义联合概率密度函数:

(21)


(22)
为了计算状态k时的费舍尔信息矩阵,定义:

(23)
其中:
因此:

(24)
子矩阵Jk可以通过该矩阵的伪逆求得,即:
(25)
k+1状态的联合概率密度pk+1为

(26)
根据状态k+1的联合概率密度我们可以求出状态k+1的费舍尔信息矩阵J(m0:k+1):

(27)


(28)
(29)

(30)
βk+1反映的是基于UWB测距的位置信息,即:

(31)
由J(m0:k+1)和Jk我们可以得到状态k+1的费舍尔信息矩阵,即:

(32)


(33)

(34)

(35)
因此,后验费舍尔信息矩阵:
Jk+1=βk+1+Hk-Hk(Jk+Hk)-1Hk,
(36)
进一步简化可得:

(37)
其中,βk+1反映了基于UWB测距的信息,Hk反映了基于IMU惯性测量单元的信息.
3 实验仿真与结果
本节我们用所提出的方法计算CRLB和PCRLB,来综合评估UWB和IMU融合方法的时空定位性能.设计一个40 m×40 m的2D正方形传感网环境,如图2所示.区域中部署了4个锚节点AN,坐标分别是(10,10),(10,30),(30,10),(30,30),区域中间分散着其他的目标节点TN,其中*代表锚节点,○代表目标节点.我们假设锚节点的通信范围可以覆盖整个区域,目标节点可以从锚节点接收到所需要的信息.

Fig. 2 Deployment of nodes in sensor network图2 传感网中节点的部署图
3.1 CRLB仿真

我们主要从3个角度来分析不同因素对CRLB的影响.
1) UWB+IMU融合方法和单独采用UWB方法对CRLB的影响

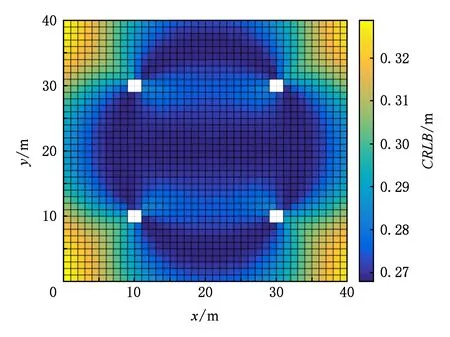
Fig. 3 CRLB based on the proposed hybrid method图3 基于UWB+IMU融合方法的CRLB
2) UWB测距误差和IMU步长误差对CRLB的影响

Fig. 5 Average CRLB of different IMU step length error图5 IMU步长误差对平均CRLB的影响
3) 锚节点的部署结构和数目对CRLB的影响
我们还研究了锚节点在不同位置以及锚节点数量不同时对系统定位精度的影响.我们采用了4种锚节点部署方式,如图7所示,其中*代表基站位置.按照不同的拓扑图,计算相应的CRLB,如图8~11所示.

Fig. 7 Different deployment of the anchor node图7 锚节点的不同部署

Fig. 8 CRLB of Topology 1图8 拓扑图1对应的CRLB
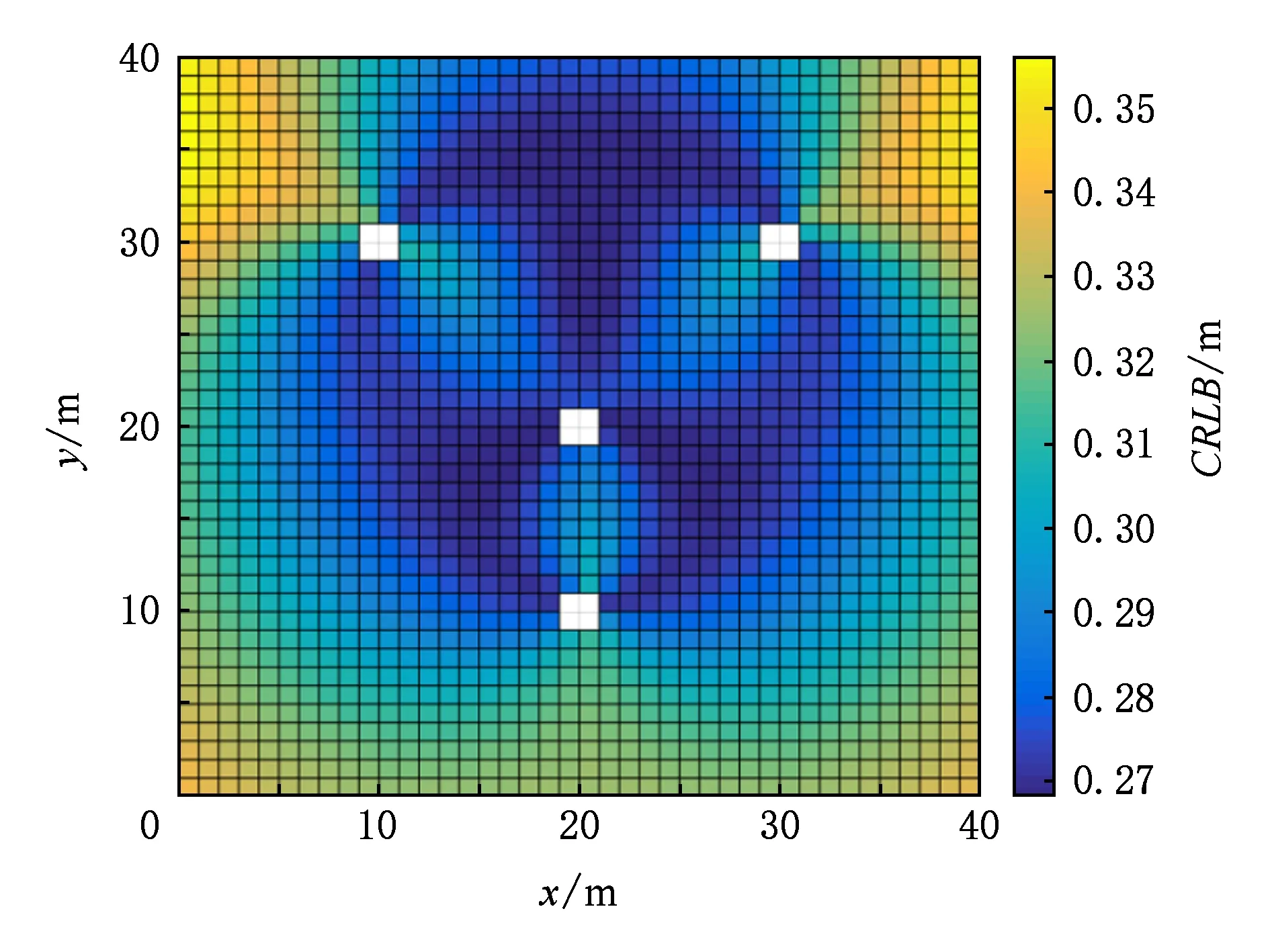
Fig. 9 CRLB of Topology 2图9 拓扑图2对应的CRLB
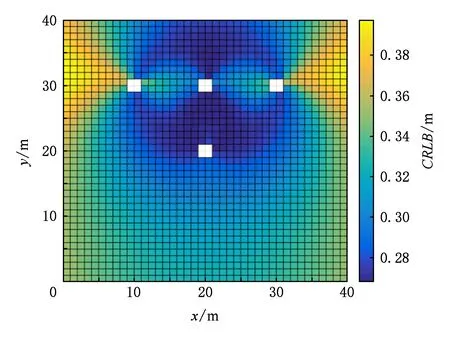
Fig. 10 CRLB of Topology 3图10 拓扑图3对应的CRLB

Fig. 11 CRLB of Topology 4图11 拓扑图4对应的CRLB
从图8~11中可以看出:①当锚节点数目相同时,锚节点的部署形状越接近于矩形,定位精度越高.如图8所示,锚节点的部署形状为正方形,最坏的CRLB=0.32 m,与图9和图10最坏的CRLB进行比较,精度分别提高了3 cm和5 cm.②图10的CRLB最大,即表示定位精度最差,可能是由于锚节点部署的太密集而导致.③图11的锚节点数目为6个,得到的最好CRLB=0.23 m,与图8的最好CRLB相比,精度提高了4 cm.
3.2 PCRLB仿真
在计算PCRLB时,我们可以通过2.3节的公式递归地计算出费舍尔信息矩阵,由于式(28)~(30)中的方程表达式通常没有近似解,为了解决这个问题,我们采用蒙特卡罗方法将连续积分转换为离散求和,并最终计算出PCRLB.


从2个角度来分析不同因素对PCRLB的影响.
1) UWB+IMU融合方法中不同α和ε对PCRLB的影响以及单独采用UWB方法和单独采用IMU方法对PCRLB的影响

Fig. 12 PCRLB of the proposed hybrid method图12 基于UWB+IMU融合方法的PCRLB
图12显示了在UWB+IMU融合方法中,在不同α和ε下可实现的最小误差,我们还给出了单独使用UWB方法(即没有IMU惯性测量单元)以及单独使用IMU方法(即没有UWB测距定位)时可以实现的最小误差.从图12可以看出:①与基于单一UWB方法相比,基于UWB+IMU融合方法将IMU步长信息以及角度信息融合后,显著提高了移动节点的定位精度.单独使用UWB方法时,PCRLB=0.29m;采用融合方法后当α=0.05,ε=10°时,PCRLB=0.22m,定位精度为提高了7 cm.②与基于单一IMU方法相比,基于UWB+IMU融合方法将UWB测距信息融合后,补偿了基于IMU方法所产生的累积误差问题.③随着α和ε的增加,PCRLB也增加,这意味着UWB+IMU融合方法的定位精度与步长及角度误差成反比.④UWB+IMU融合方法的PCRLB在一定阶段后会趋于稳定.
2) 不同锚节点部署结构对PCRLB的影响
按照图7所示的不同拓扑图,我们可以计算出相应的PCRLB,这里α=0.1,ε=10°,如图13所示:

Fig. 13 PCRLB of different topologies图13 不同拓扑结构产生的PCRLB
从图13可以看出:①相同数目的锚节点但不同结构的拓扑,对定位精度会产生不同的影响,但影响较小,如拓扑图1的PCRLB=0.235 m,拓扑图2的PCRLB=0.24 m,拓扑3的PCRLB=0.245 m,波动范围不超过1 cm.②不同数目的锚节点对定位精度产生的影响较大,拓扑4的PCRLB=0.205 m,将拓扑1和拓扑4进行比较,可以看出定位精度提高了3 cm.
4 总结和展望
本文提出了一种基于UWB和IMU的融合定位方法,来实现传感网中目标节点的位置追踪.通过计算克拉美罗下限CRLB来表征融合定位方法的空间定位性能,验证其在解决多径和几何拓扑问题上的有效性.通过计算后验克拉美罗下限PCRLB来表征融合定位方法的时间定位性能,验证其在累积误差纠正上的有效性,为基于UWB和IMU融合定位算法的设计和仿真提供理论支持.实验结果表明,本文提出的融合定位方法具有更好的时空定位性能,更能接近实际应用的理论精度下限.
然而,虽然基于UWB和IMU的融合定位方法相比于单一UWB定位或单一IMU定位方法能够获得更好的性能,但其还是会带来一定的问题:1)设备复杂性问题.相对于单一的定位方法,融合定位方法必定会对硬件设计(如设备体积等)提出更高的要求,如何在满足实际要求的情况下,设计融合定位装置是未来工作中需要考虑和解决的.2)算法复杂性问题.融合定位过程中需要进行多源数据的处理,因此需要合适的融合算法对这些数据进行融合,融合算法带来的算法复杂性问题也是实际应用中需要考虑和解决的.3)资源分配和功耗问题.单独采用IMU方法时不需要部署锚节点,在目标间通信上节省了很大的资源,但UWB和IMU融合定位方法中,必不可少地需要进行目标节点与锚节点之间的资源分配和任务调度,同时相应的功耗也需要考量,因此,如何设计融合定位中的任务调度和通信处理,尽可能地降低系统功耗是我们下一步的研究重点.
