小天体表面采样技术综述
2018-11-07刘德赟赖小明王露斯刘晓庆赵曾张加波全齐全
刘德赟,赖小明,王露斯,刘晓庆,赵曾,张加波,全齐全
(1. 北京卫星制造厂有限公司,北京 100094;2. 哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001)
0 引 言
小天体是人类了解太阳系起源演变的重要载体,承载着丰富的科学信息,同时小天体含有丰富的贵金属及稀有元素,具有巨大的利用价值,对小天体进行采样探测具有重要的科学与工程意义。目前,各国已争相开展了小天体采样任务以及相关研究工作,并成功应用于“罗塞塔号”“隼鸟号”等探测任务,小天体采样已成为国内外深空探测的研究热点。
1 小天体特性分析
在太阳系中,比行星小而又不属于矮行星的天体称为小天体。小天体包括小行星、彗星、流星体,绕太阳旋转没有气体挥发和大气活动的固体小天体称为小行星。彗星一般由彗头和彗尾组成,彗头包括彗核和彗发两部分,彗尾则是彗星靠近太阳时彗核物质被蒸发、喷发而形成。体积很小,不符合小行星或彗星标准的小天体称为流星体[1-2]。小天体探测通常是指小行星和彗星探测,其中近地小行星探测最具有科学价值与工程可行性,本文重点对小行星采样技术进行分析。
衡量小行星表面性质的一个重要参数——反照率(albedo),代表反射与入射到小行星表面的能量之比在所有频率范围的积分,它与小行星表面物质的性质(成分、颗粒大小、表面结构等)有关。最初小行星被划分为反照率小的碳质(C型)小行星和反照率大的石质(S型)小行星。随后又结合反射光谱等特征而分为多类(C、B、F、G、P、D、T、S、M、E、A、Q、R、V型等)。最新的分类研究应用反射光谱和反照率,把小行星分为S群、C群、X群3大类以及一些次要的异常类型(托连分类),每个大类下面又分出亚类,共26个光谱型[3-4]。
小行星表面的反射光谱反映了其本身的物质组成。如C型的化学成分与太阳大气的平均组成很相似(挥发性组分除外),富含碳质和有机质成分,类似于碳质球粒陨石。S型小行星的表面主要成分为硅酸盐与金属铁,类似于普通球粒陨石与石铁陨石;M型主要为金属铁;不同类型的小行星是由于其内部发生了不同程度的熔融分异的结果,反映了太阳系的演化历史。
小行星采样作业主要是针对星体表层物质进行,目前已探明的小行星表面物质按类型大致包括表壤、鹅卵石、巨石及陨击坑等类型。
1)表壤,大多数小行星表面(或部分表面)存储一层表壤层,形成的原因主要为“空间风化”,包括天体撞击、太阳风离子输入、物质溅射和微陨石轰击等,会使小行星原始物质碎裂后产生大量大小不一、形态各异的碎屑和砂粒。另外,太阳辐照、太阳风和空间离子都会在小行星表面空间产生静电场,使得直径较小的颗粒产生悬浮层,在引力作用下逐渐沉积形成表壤。
2)鹅卵石,许多小行星表面都会有类似于地球表面鹅卵石大小的石块存在,其大小为几十厘米,体积较小的小行星表面鹅卵石分布可能更多一些。
3)巨石:大多数小行星表面都存在巨石,尤其是体积较小的小行星表面覆盖的巨石比例更高(如Itokawa),这些巨石大小从几米至几十米,甚至上百米。
4)陨击坑:小行星大多表面存在不规则的陨击坑,小行星经历的无数次陨击也使表面不同程度的形成了表土层。灶神星表面有大量陨击坑,最显著的是南极附近的雷尔西尔维亚(Rhea Silvia)陨击坑(也称为盆地),其直径为505 km。该坑的底部比地面约低13 km。哈勃望远镜所摄灶神星光谱分析表明,该坑穿过灶神星外壳好几层,可能深到幔。另外,许多岩石覆盖的小行星表面存在许多空隙,Itokawa孔隙率约为40%,Eros孔隙率约为25%。
2 国内外小天体采样研究现状及发展趋势
2.1 国内外采样研究现状
到目前为止,国内外共发射了近20颗与小天体相关的探测器,这些探测器或者飞越小天体,或者绕飞小天体,或者在小天体上着陆,或者采样返回,以不同形式对小天体进行科学探测。在后续的深空探测规划中,美国、欧洲均积极推进小天体采样返回任务的实施,主要包括美国于2016年发射的欧西里斯(OSIRIS-REx)小行星采样返回探测器以及欧洲的马可波罗–R小行星采样返回探测器[5-6]。
1)“星尘号”(Stardust)
“星尘号”是美国航空航天局(National Aeronautics and Space Administration,NASA)探索计划任务之一,于1999年2月9日发射升空。“星尘号”探测器由主结构和返回舱组成,主任务是采集wild-2彗星的彗发物质和飞行过程中的宇宙物质,是首次成功完成彗星采样返回任务的探测器。
Stardust样品采集器(Stardust Sample Collection,SSC)采用气凝胶进行设计,实现对彗星、星际尘埃进行收集,气凝胶是一种低密度、惰性、低热导率、低传声性能、多孔的硅基固体材料,气凝胶的密度仅为玻璃的千分之一,由硅石与液体混合产生凝胶,曾作为轻质隔热材料用于火星探险者(Pathfinder)的索杰纳巡视器(Sojourner rover)。气凝胶材料质量轻,十分适用于捕获空间微小粒子。
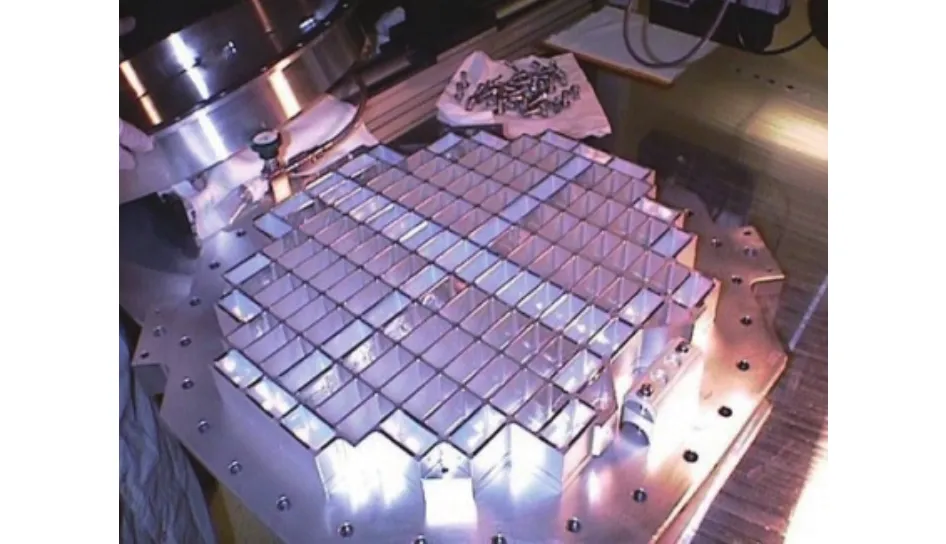
图1 SSC示意图Fig. 1 The picture of SSC
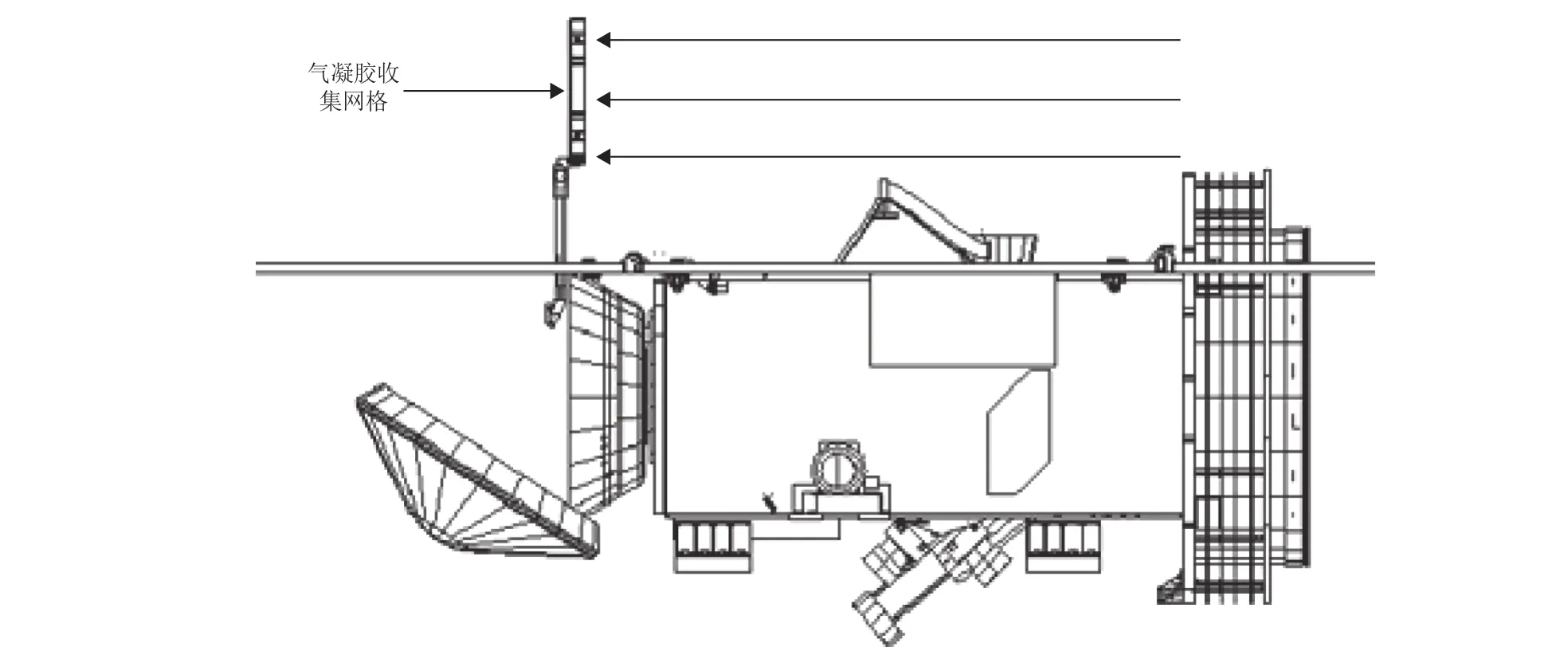
图2 星尘探测器采集Wild 2彗星尘埃物质时的构形侧视图Fig. 2 The structure of Stardust sampler
SSC呈网球拍状态,如图1所示,每面包含130个矩形气凝胶模块(2 cm × 4 cm)和2个稍小的菱形模块,各个气凝胶模块安装在铝质栅格中,单面可采集面积大于1 000 cm2。SSC彗星物质采集面的气凝胶厚度为3 cm,星际物质采集面厚度为1 cm,SSC气凝胶模块的密度采用了分级设计,粒子入口处密度相对较低,随着深度的增加密度增大。SSC采集彗星尘埃过程如图2所示。
在粒子捕获过程中,冲击速度可达6.1 km/s,粒子的外形、化学结构可能被破坏,或者被完全汽化。为不破坏粒子特性,气凝胶样品采集器使用多孔结构的硅基固体材料,99.8%的空间为空隙,当颗粒撞上气凝胶时,将被埋在材料内,并形成长长的轨迹,轨迹长度最大可达粒子长度的200倍。
由于气凝胶透明度高,捕获的高速粒子产生的锥形孔可以通过立体显微镜很容易找到,锥形的最大开口位于入口处,粒子则完整地保存在锥尖处。根据这一原理,研究人员可以由此确定颗粒的入射方向,这是采用单气凝胶模块双面采集彗星物质和星际物质可行的原因。SSC设计的粒子采集范围约为1 μm~1 mm,将主要对粒径15 μm的颗粒进行研究[7]。
2006年1月15日,第1次成功完成彗星采样的Stardust返回舱着陆地球,随后样品容器被转移至洁净间中存放。研究人员初步估计SSC可在显微镜中看到的斑点颗粒不少于100万个,其中大于0.1 mm的颗粒约10个,最大粒径颗粒接近1 mm,在星际物质采集面,发现约45个颗粒。样品粒子在气凝胶中的轨迹如图3所示。

图3 粒子在气凝胶中的轨迹示意图Fig. 3 The trajectories of particles in aerogel
2)“隼鸟号”(Hayabusa)
“隼鸟号”(又名Muses-C)是日本宇宙航空研究开发机构(Japan Aerospace Exploration Agency,JAXA)研制的一颗近地无人采样返回小行星探测器,2005年11月20日、26日对Itokawa小行星进行了2次样品采集。
如图4所示,“隼鸟号”是人类第一个小行星采样返回探测器,也是首次实施小行星软着陆与起飞任务的探测器,接触即走(Touch and Go,TAG)的着陆、采样、起飞模式具有开创意义。
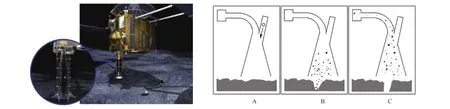
图4 Hayabusa采样原理示意图Fig. 4 Working principle of Hayabusa sampler
由于Itokawa小行星体积、表面重力均较小,在任务实施前也难以确定其表面是坚硬的岩石还是柔软的尘土,JAXA认为Hayabusa要实现长期着陆非常困难,而采用挖掘等采样方式施加的力可能将探测器推离小行星,因此Hayabusa采用溅射采样方式,探测器与小行星表面接触过程中,通过射弹撞击小行星表面,造成表层土壤或大型岩块发生颗粒溅射,溅射颗粒通过锥形罩进入样品容器进行存储[8]。
Hayabusa采样装置主要由抛射器、锥形罩、可扩展编织罩、金属罩组成,如图5所示。抛射器构型如图6所示,可发射金属射弹撞击小行星表面,为提高可靠性,抛射器采用了三管设计,Hayabusa金属射弹采用稀有金属钽作为材料(可以很容易从样品中分析出),质量约为5 g,运行最大速度可达300 m/s,射弹与小行星表面接触面为半球形,如图7所示,射弹诱发土壤颗粒溅射,射弹射出后的残余气体将收集在抛射器中。
Hayabusa采样装置与小行星表面接触时,通过罩形结构形成封闭环境,在防护探测器受尘土污染的同时,溅射的颗粒物质只能在金属罩、扩展编织罩、锥形罩内运动,进入样品罐内,并通过探测器内的转移机构将样品转移至样品容器中。Hayabusa配置的样品容器如图8所示,其安装在质量为17 kg、直径为400 mm,高200 mm的返回舱中。Hayabusa样品罐存放在样品容器内,样品容器通过锁紧机构与压缩弹簧实现与筒体的封闭,并通过双密封圈设计保持样品容器内部的纯净度,返回地球后(1个大气压下)100 h可保证内部气压不大于1.33 Pa[9-10],如图9所示。样品容器安装位置如图10所示。

图5 Hayabusa采样装置示意图Fig. 5 Hayabusa sampler

图6 Hayabusa抛射装置示意图Fig. 6 Catapult device of Hayabusa sampler
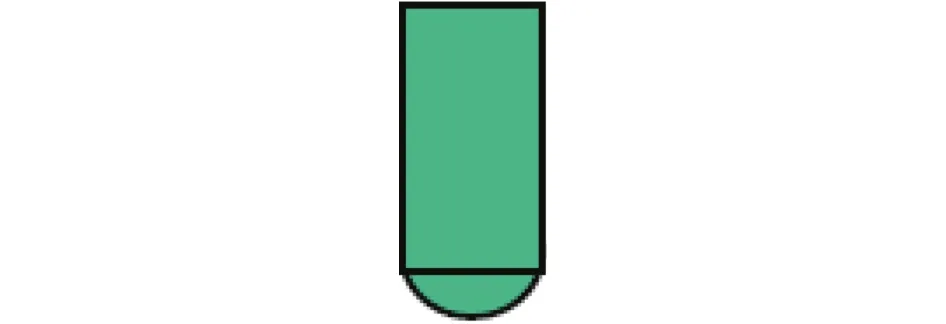
图7 Hayabusa射弹形状示意图Fig. 7 The bullet shape of Hayabusa

图8 Hayabusa样品容器示意图Fig. 8 The sample container of Hayabusa
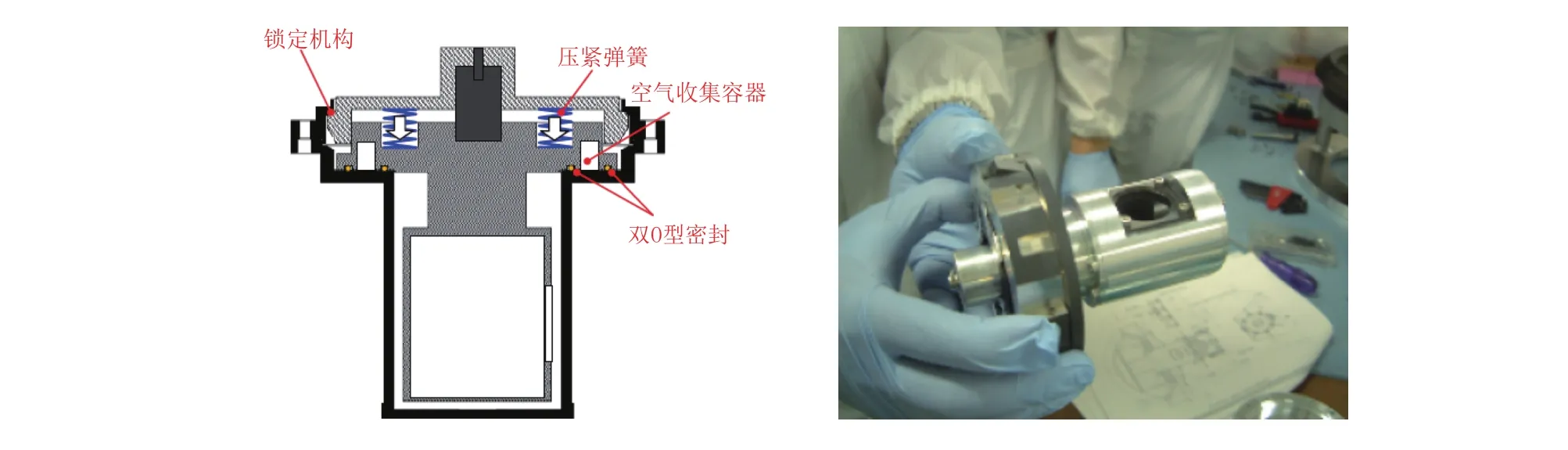
图9 Hayabusa样品容器密封示意图Fig. 9 Abdichtprinzip of Hayabusa container
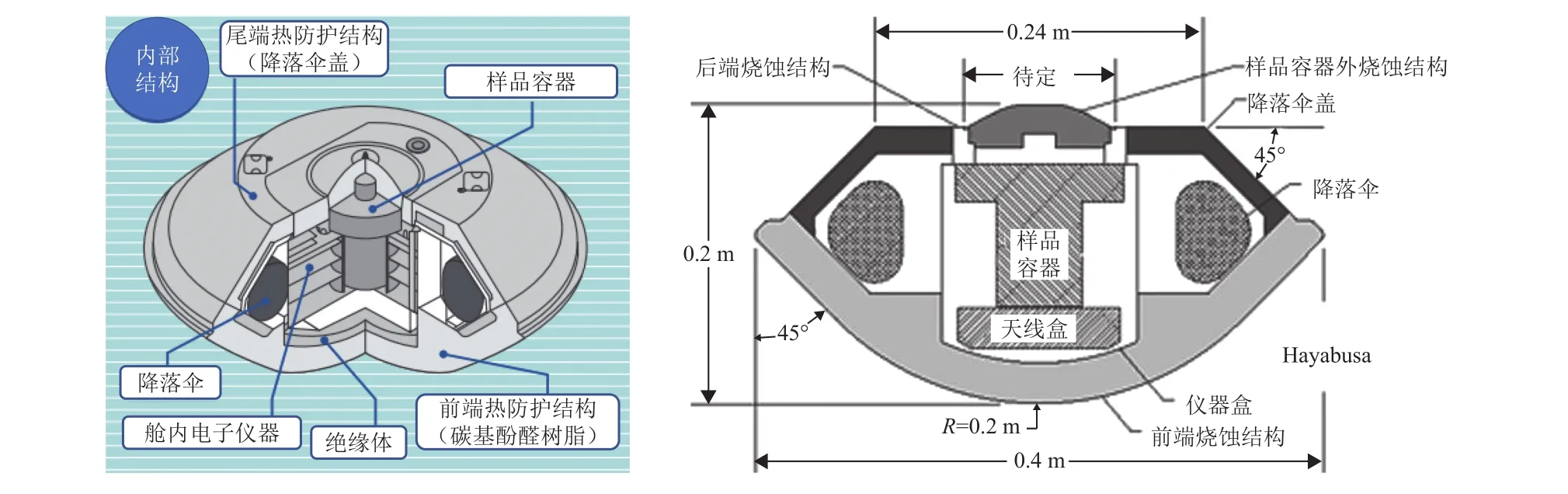
图10 Hayabusa样品容器安装位置示意图Fig. 10 Installation of Hayabusa container
由于着陆前,Hayabusa无法确定采样点状态,采样装置设计为可独立于地面控制,自主完成样品采集。Hayabusa在小行星采样返回任务中为采样任务定义的成功判据为:从目标天体表面获取部分表层样品返回地球,可供小行星表面组成研究,可供与地球样品进行碳同位素比较分析。
Hayabusa样品舱返回地球后,研究人员发现样品容器内的颗粒十分微小,通过CT扫描发现未采集到粒径大于1 mm的样品,颗粒粒径约0.01 mm。根据JAXA的分析,样品容器内颗粒为小行星物质,总共约带回1 500颗从小行星的微粒。研究人员通过对带回的微粒进行研究,主要研究结果为:微粒中存在橄榄石、斜长石等岩石的大型结晶,这些岩石可能曾经历高温;微粒与地球上发现的一种陨石特征一致,而且微粒受热后产生的气体不具备地球物质特征;在对岩石的检测中未检出有机物、碳元素等与生命有关的物质[11-12]。
3)罗塞塔(ROSETTA)
“罗塞塔”是欧洲空间局(European Space Agency,ESA)实施的一次彗星探测任务。“罗塞塔号”探测器由轨道器和一个“菲莱”(Philae)着陆器组成。“罗塞塔号”的发射重量约为3 000 kg,其中菲莱着陆器的质量约为100 kg。2014年11月12日成功着陆彗星,是人类历史上首次彗星软着陆任务。“罗塞塔号”探测器的主要目标是对目标彗星(67P/Churyumov-Gerasimenko)进行着陆探测,探索46亿年前太阳系的起源之谜,以及彗星是否为地球“提供”了生命诞生时所必须的水分和有机物质。Philae着陆器成功实现彗星软着陆后,将利用配置的采样装置SD2(Sampler Drill and Distribution subsystem)开展彗星土壤样品采集,其可在极低重力、极低温环境下采集样品,采样过程中通过鱼叉式装置把着陆器锚定在彗星表面,防止它在微弱的彗星引力下逃逸[13],Philae采样设备如图11所示。

图11 Philae采样装置示意图Fig. 11 The sampler of Philae
SD2采样装置由电控单元和采样机构组成,总质量约5.1 kg,其中采样机构3.7 kg,电控单元1 kg,线缆0.4 kg。待机过程中,平均功耗约1.5 W;钻进或采样过程中,平均功耗约6 W,最大功耗14.5 W。
采样前,Philae着陆器的全景相机、探测仪对着陆点进行探测,根据获取的地形情况,转动着陆器主体结构,使采样机构到达相对理想的钻探点,钻杆进行下探采样,采样完成后钻杆回缩进行样品分发,开展原位科学试验。SD2采样机构安装在着陆器上,采用碳纤维作为采样器的保护结构,避免外部污染物进入活动机构中。螺旋钻集成了钻进和采样功能,可在确定的、可测量的深度下完成样品采集,并避免钻孔毁坏,采样管(如图12所示)依靠接触压力完成样品采集,SD2采样机构的最大采样深度为0.23 m,采样过程如图12所示。
SD2采样机构获取样品后,体积检查计可对分装样品体积进行检测,每份样品体积约10~40 mm3,并配以振动装置,使样品进入样品容器中进行密封加热,然后采样系统将生成的气体导入分析仪中进行分析,并将有价值的数据传回地球。
Rosetta任务中,Philae着陆器为开展在彗星表面的采样及其它原位探测工作,采用了锚定技术进行配合。Philae着陆器的锚定主要由冰螺栓、冷气推力器、鱼叉装置组合完成,如图13所示,冰螺栓与鱼叉装置存在一定的冗余备份作用。着陆冲击过程中,首先与彗面接触的冰螺栓依靠着陆器的冲击力刺入彗星表面,冷气推力器同时喷气反推,保证3个冰螺栓刺入彗星表面,然后鱼叉装置发射,形成对彗星表面的多点刺入,实现着陆器与彗星的固定。Philae鱼叉装置长190 mm,宽104 mm,高71 mm,重量为440 g,利用火工装置驱动,可完成着陆器的锚定、彗星表面温度测量、材料特性分析等工作[14]。
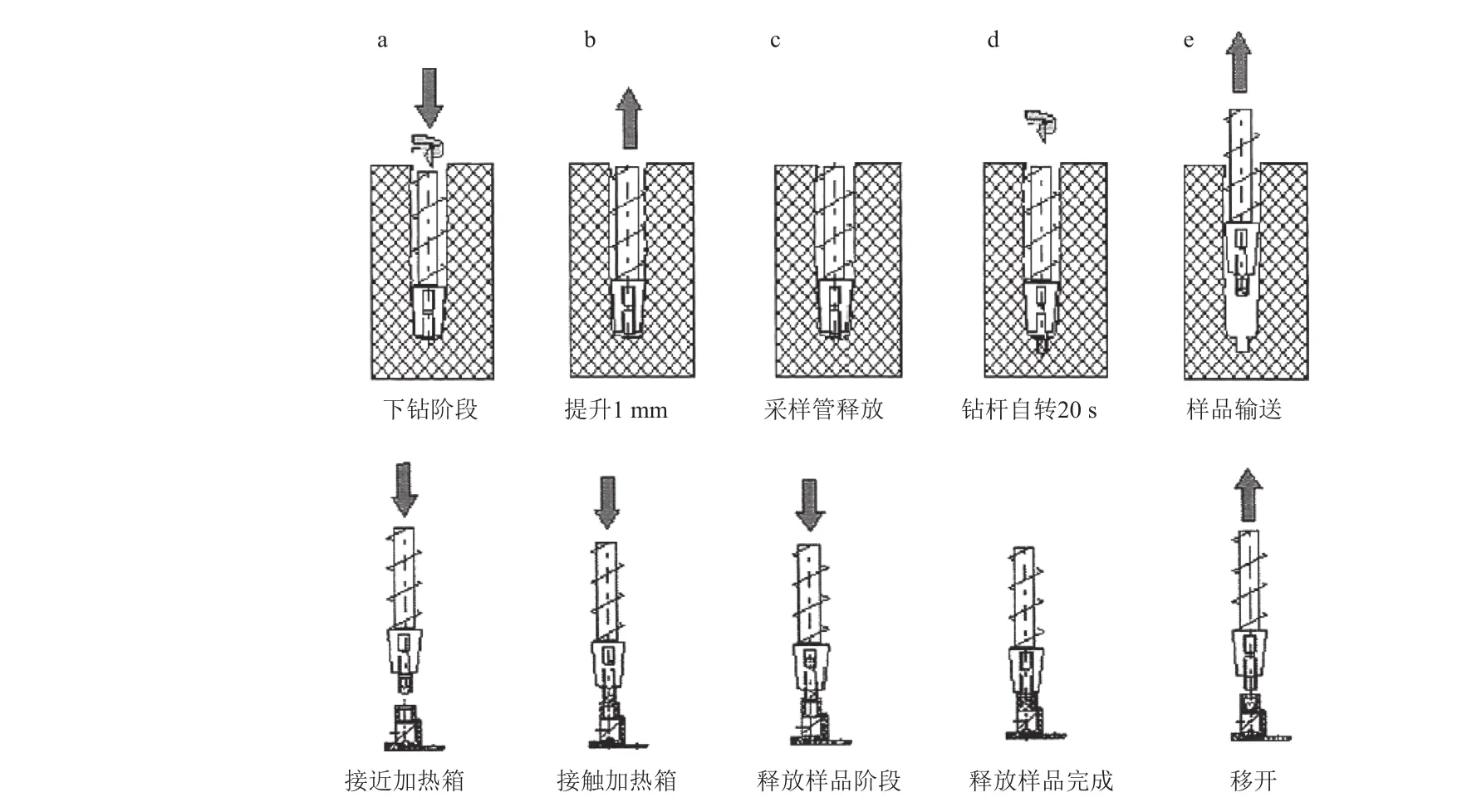
图12 SD2采样及放样过程示意Fig. 12 Working process of SD2 sampler
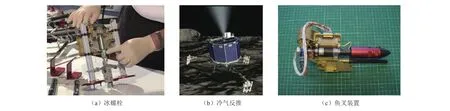
图13 Philae冰螺栓、冷气反推、鱼叉装置示意图Fig. 13 The bolt,airbackstepping and harpoon of Philae
2014年11月13日Philae完成着陆,ESA确认用于固定Philae的鱼叉装置未发射,目前仅有各着陆腿上的冰螺栓完成了彗星表面刺入动作。
4)福布斯–土壤(Phobos-Grunt)
Phobos-Grunt于2011年11月9日发射升空,原计划针对火卫1(Phobos)实施采样返回任务,其选定着陆点位于纬度–5°~5°、经度230°~235°范围内,着陆后开展为期2~7天的采样任务。
Phobos-Grunt配置采样装置如图14所示,采样机械臂可实现直径约1.3 cm的样品采集,机械臂末端管状采样器可形成爪状。采样器内活塞可将样品推入柱形容器中,光敏二极管可确认样品采集是否成功。为获取85~160 g土壤样品,将进行15~20次采样,样品装至容器后,通过加压弹性包将其转移至返回器中。样品转移完成后,转移通道管将展开,为返回器起飞避让空间[15]。

图14 Phobos-Grunt采样装置示意图Fig. 14 The sampler of Phobos-Grunt
探测器由于主发动机故障,未能进入转移轨道,任务失败。
5)“隼鸟2号”(Hayabusa 2)
“隼鸟2号”(Hayabusa 2)是“隼鸟号”小行星探测器的后续机型,继承了“隼鸟号”的设计。“隼鸟2号”探测器的总重约为600 kg,将飞往小行星“1999JU3”,该小行星位于“隼鸟号”曾着陆的糸川小行星附近,距地球约3亿千米,据称该小行星具有丰富的含水矿物和有机物,这些都将有助于人类了解太阳系的生命起源。预计2018年将到达小行星,进行小行星全球观测,并释放罐式机器人与新增加的小型着陆探测器,2019年将释放撞击器,并实施小行星采样任务,2020年返回地球。
Hayabusa 2在采样方式上继承了Hayabusa设计,但在样品采集与封装方面进行了改进设计。在样品采集方面,JAXA研究人员认为1999JU3是多岩石的C类小行星,在主要设计方面仍采用抛射体溅射采样,但将射弹的形状由原来的半球形,调整为带90°锥角的锥体,如图15所示[16]。
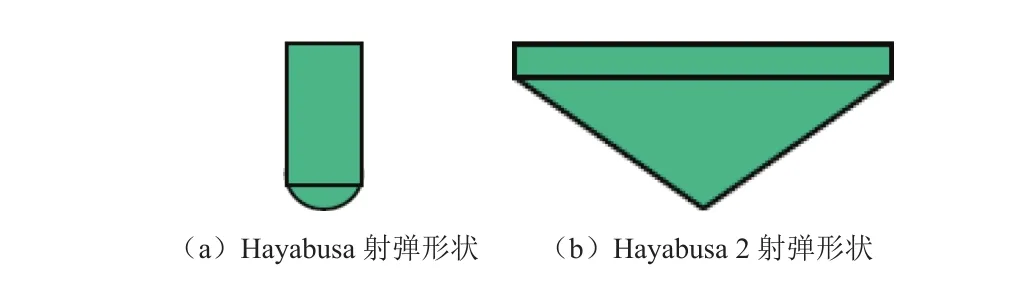
图15 射弹形状对比示意图Fig. 15 The comparison of bullet shape between Hayabusa and Hayabusa 2
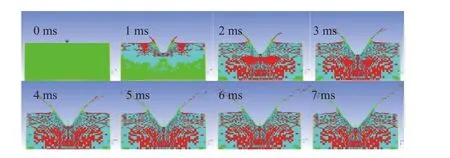
图16 Hayabusa 2射弹溅射土壤过程示意图Fig. 16 The working process of bullet of Hayabusa 2
2014年12月5日,JAXA确认采样装置在轨成功展开,目前Hayabusa 2仍在前往1999JU3的路途中。
6)欧西里斯(Osiris-Rex)
“欧西里斯”是NASA计划实施的一项小行星采样返回任务,全名为“起源、光谱释义、资源识别、安全、风化层”,“欧西里斯”探测器由洛克希德马丁公司研制,于2016年9月通过Atlas V发射升空,2017年地球借力,2019年10月到达Bennu小行星(1999 RQ36)进行探测,预计2023年返回地球。
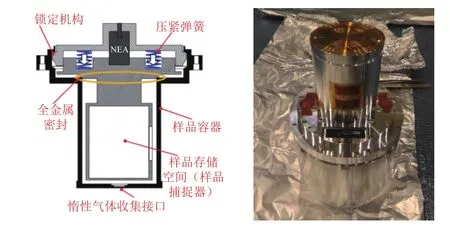
图17 Hayabusa 2样品容器示意图Fig. 17 The sample container of Hayabusa 2
“欧西里斯”探测器的总体构型图如图18所示。探测器采用承力筒作为主结构(继承自MRO),顶板上布置了返回舱和科学载荷。共配置两块8.5 m2的太阳帆板,具有二维驱动功能。侧面布有直径2 m的高增益天线和中增益天线,底面布置了2个200 N的主发动机。

图18 Osiris-Rex采样装置示意图Fig. 18 The sampler of Osiris-Rex
根据前期观测研究,Osiris-Rex项目组认为Bennu小行星存在疏松的风化层颗粒的可能性较大,曾考虑粘性板、爪式蛤壳采样器、驱动管、螺旋钻、岩芯钻、铲、耙子、气体激励等多种采样方式,最终选择了气体激励采样方式。气体激励采样方式的优点在于可通过较少的活动部件获取可观的样品量,保持其原位性能,并且采样器无需采用电机。Osiris-Rex配置的采样装置(Touch-And-Go Sample Acquisition Mechanism,TAGSAM)由采样器和机械臂组成,采样器同时作为样品容器,采样完成后采样器及样品存储在返回舱中返回地球,其返回舱继承了Stardust探测器的设计。当样品获得机械接触到小行星表面时,取样器向小行星的风化层吹高压氮气,在气流的作用下,使小行星表面碎屑流体化,随气流一起被吹进取样器,取样可在大约5 s内完成[18-19]。
Osiris-Rex采样前,将以0.1 m/s的速度缓慢接近小行星表面,为满足末端需求,探测器下降的垂直速度不能大于0.12 m/s。采样装置从收拢状态开始展开,为避免受到污染采样器在展开前处于收纳盒中,收纳盒如图19所示。着陆最后阶段机械臂上的弹簧将进行压缩储存能量,相机组件以1 fps记录采样过程。

图19 Osiris-Rex采样装置收拢及收纳盒示意图Fig. 19 The sample container of Osiris-Rex
采样过程中,通过探测器环形氮气流使表层样品流动,并利用接触盘中的聚酯薄膜材料收集流动的表层样品,如图20所示,Osiris-Rex可通过机械臂上携带氮气瓶可支持至少3次采样过程,整个采样过程将在5 s内完成,将获取60~2 000 g样品,可采集2 cm以下的颗粒物质。
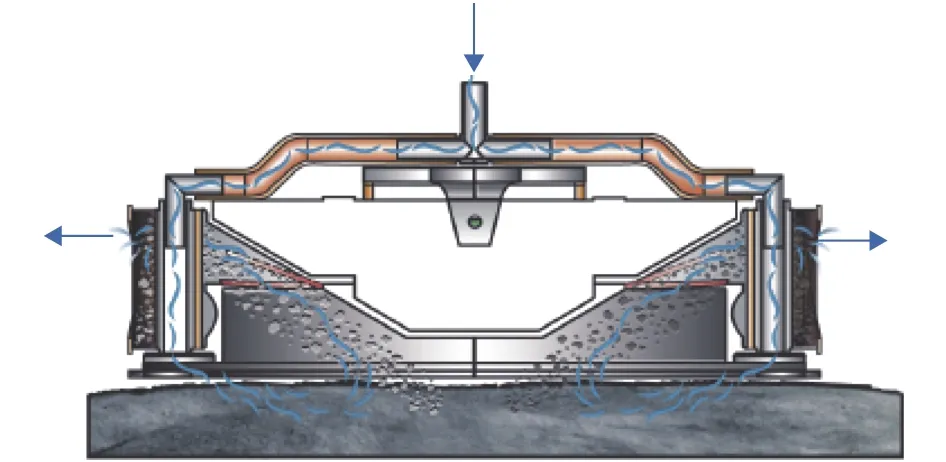
图20 Osiris-Rex N2激励采样示意图Fig. 20 Working principle of Osiris-Rex sampler
根据Osiris-Rex任务设计,当探测器着陆点偏离范围小于25 m时,Osiris-Rex采样装置1次采样成功(> 60 g)的概率达到了98.3%。连接采样器的活动关节设计,使得Osiris-Rex采样装置可适应不大于15°的倾斜角度。采样完成后机械臂弹簧反弹,发动机点火离开小行星表面,当到达安全距离后,将通过探测器惯量的变化确定样品质量(该方法曾被用于“卡西尼”探测器推进剂监测),然后TAGSAM采样器运动至宽视场相机SamCam(如图21所示)的视场中,通过图像信息确认样品采集成功(比如采样器外部沾染了土壤颗粒),一旦确认样品采集量满足科学需求,机械臂将运动至样品返回舱(继承Stardust)上方进行对准对准环(如图22所示)释放,微动开关和小型相机StowCam将对对准情况进行确认,对准后完成采样器与机械臂分离,机械臂重新收拢,返回舱关闭并进行密封,随后返回地球。Osiris-Rex采样器将在真空和微重力环境下开展了采样试验,试验表明该采样器可在该类环境约束下获取大于60 g的样品[20],地面采样试验如图23所示。
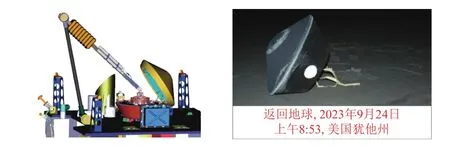
图21 Osiris-Rex封装过程及返回地球示意图Fig. 21 Sampler packaging process and container return of Osiris-Rex
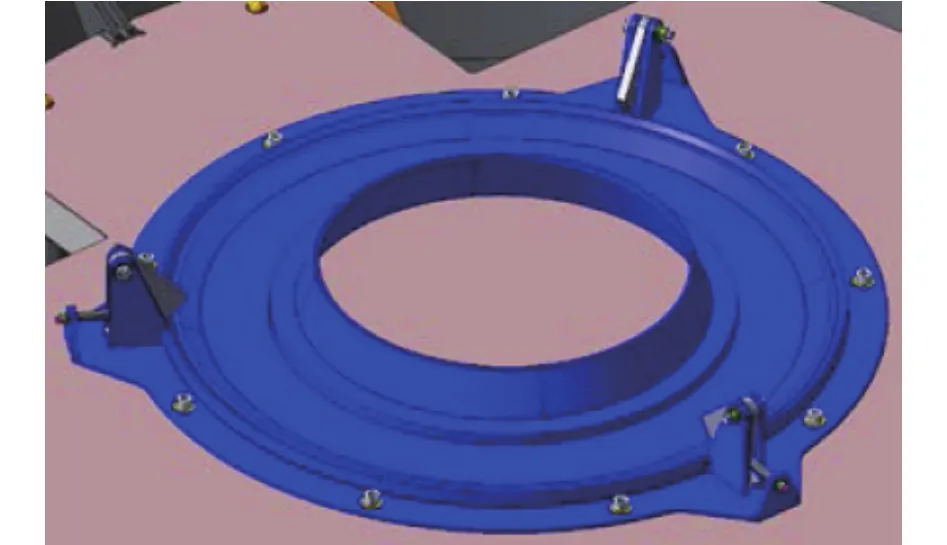
图22 Osiris-Rex采样器对准环示意图Fig. 22 Alignment ring of Osiris-Rex
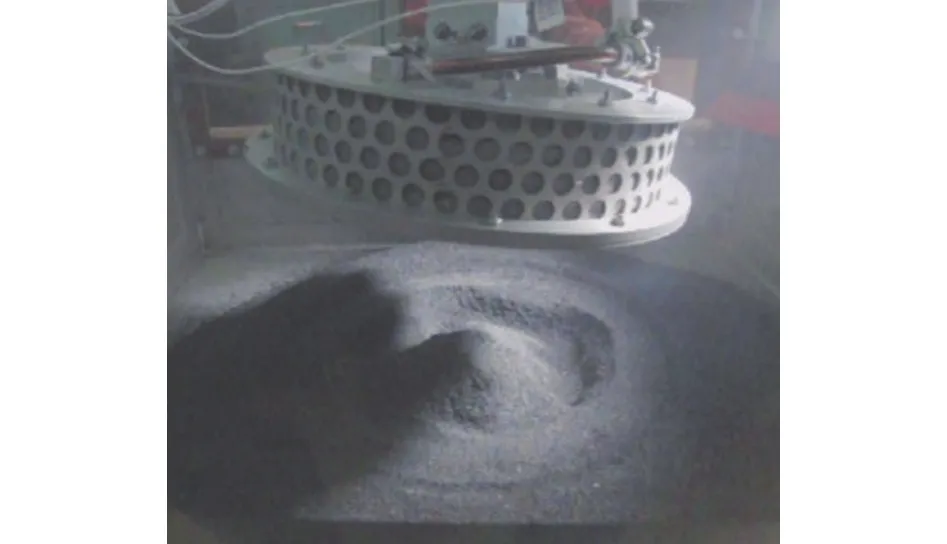
图23 Osiris-Rex地面采样试验示意Fig. 23 Alignment ring of Osiris-Rex
7)马可波罗(MarcoPolo-R)
本施工段采用的衬砌类型主要是复合型衬砌,其主要参数为:衬砌类型:Ⅲa型复合式衬砌;喷射混凝土类型及厚度:C25,12cm;钢筋网及系统锚杆:25cm×25cm;1.2m×1.5m,φ6mm;二次衬砌厚度:40cm;仰拱厚度:50cm。
“马可波罗”(Marco Polo)是ESA“宇宙愿景项目”中的一项候选任务,旨在获取小行星表面物质并安全返回地球。科学家相信,小行星上携带有太阳系最初形成时的物质,有助于研究约46亿年前太阳系的形成过程。MarcoPolo-R计划针对近地C型小行星2008 EV5开展采样返回,预计采集样品量约100 g,于2029年左右返回地球[21]。
Marco Polo-R采用TAG方式,采样装置也主要由机械臂与采样器组成,样品存储方面则考虑样品容器与返回舱的集成设计。采样装置考虑了如下约束:①可获得最少100 g左右的样品,并能返回地球;②可选择性地获取厘米级的碎块以及大量的小颗粒(微米到毫米级)。
在采样器方面,研制了多套轮刷式采样器样机,均具有如下特点:①采用对转轮减少与探测器的相互作用;②采用柔性刷减少堵塞;③采用一个样品罐收集样品;④样品罐转移前,进行采样器分离[22]。
在着陆之前,污染防护罩从BWS上脱落。采样前轮刷转动,样品罐挡门打开,允许样品进入。转动的刷子与表面接触,将风化层土壤扫入开口3 cm的样品罐中。样品罐设计形状可产生漩涡流缓释粒子动能,并困住样品。BWS设计和测试表明,其可在不到1 s时间内获得所需的样品(0.35~2.1 kg)。样品罐内部容积约700 ml,返回质量在0.35~2.1 kg,具体数值取决于样品密度。
如果小行星表面不存在疏松的土壤,岩石切凿器将被启用,在采样之前地面将根据现场信息进行决定,并上注指令。在与小行星接触2 s后,样品罐挡门将关闭,BWS在后续的样品采集过程中可以重用。BWS已在大气环境、真空环境、地球重力、低重力(利用波音KC-135A飞机)下进行了试验,并针对多种风化层模拟物进行了试验,其中一种为调整粒径分布的月面风化层土壤。岩石切凿器试验表明,单个岩石切凿器工作时每次可产生和收集到15 g样品(班德利尔凝灰岩),样品收集时需两个切凿器都工作。由于小行星表面特性、接触条件(相对速度、位置)存在不确定性,BWS携带的岩石切凿器被认为是可靠的获取方式。Marco Polo-R着陆及采样过程如图24所示,岩石切凿器和轮刷式采样器如图25所示。
2012年7月开始,ESA针对TAG采样机构进行了独立的技术研究,包括粘性板、岩芯管、螺旋钻、抛射体溅射(Hayabusa)、切割轮、小铲、集材索、气体传送设备等。目前已提出了两种可替代的采样方案TAS版和Astrium版,如图26所示。
探测器与小行星表面接触时间只维持几秒,因此取消了反推推力器,着陆腿也没有吸能功能,采样装置(TAS版)为一个方形推板,着陆时的接触作用将带动弹簧触发推板,快闭器可将样品留在样品容器中,如图27所示。采样后,着陆腿回缩,并将采样工具转移到样品容器中作为一个整体,通过2自由度升降机构转移到返回舱中,另两个着陆腿上安装了采样器以备后续着陆使用。
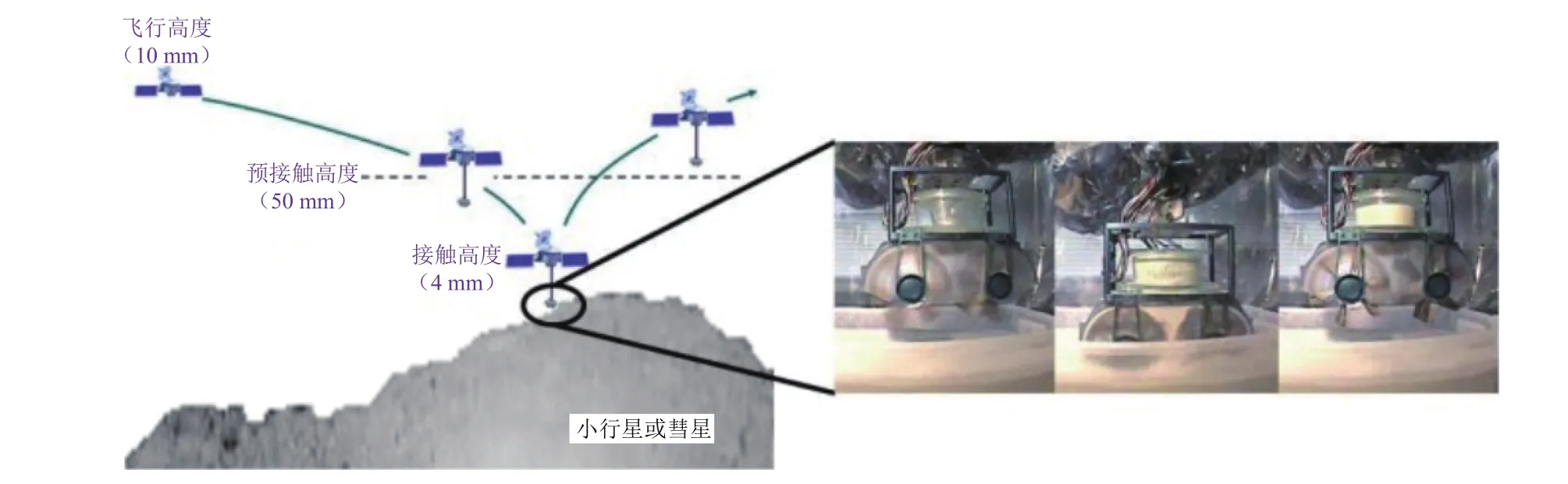
图24 Marco Polo-R着陆及采样设计示意Fig. 24 The landing and sampling process of Marco Polo-R
图25 岩石切凿器和轮刷式采样器采样示意图Fig. 25 Rock chisel and wheel brush sampler
图26 Marco Polo-R采样器示意图Fig. 26 Samplers of Marco Polo-R
图27 MPRISM采样装置及岩凿器Fig. 27 The sampler of MPRISM
Marco Polo-R同时考虑了采用Osiris-Rex任务设计的采样装置(TAGSAM)进行改进设计,在利用气体激励进行样品采集的同时,与Osiris-Rex任务不同之处在于,Marco Polo-R任务采用的MPRISM在已有的TAGSAM基础上添加3个岩凿器,如图27所示。
MPRISM也可进行3次采样任务,可获得上百克的土壤样品,并可对厘米级样品进行选取,同时可获取微米至毫米粒径的颗粒,采集获得的样品不会被大于1 μm的尘埃或液体粒子污染,返回地球后样品的含水量等级低于0.1 ppm。
当探测器与小行星表面接触时,岩凿器将点火,所有高压氮气进行激励,岩凿器将移开、破碎小行星硬质表面或大的风化层颗粒,在高压氮气作用下MPRISM的头部将收集样品至托盘中。MPRISM采样器的转移、对准、释放过程与Osiris-Rex任务类似。
2013年,MPRISM采样器(仅含1个岩凿器)先后多次针对Osiris-Rex TAGSAM采样装置的采样模拟对象(玄武岩)等在地球重力与大气环境下开展了相关测试,如图28所示。测试表明,在岩凿器不点火情况下,MPRISM采样器具有Osiris-Rex TAGSAM采样器的能力,在增加岩凿器可进一步提高采样量,并提升了对采样点土壤的适应能力[23-25]。
图28 MPRISM采样测试Fig. 28 Sampling test of MPRISM
8)彗核采样返回(Triple F)
彗核采样返回任务Triple F(Fresh From the Fridge)是ESA宇宙梦想计划项目中提出的项目之一,计划于2018年4月发射,由于各种原因,仍未发射,先后利用月球、地球借力,2023年中期到达79P/du Toit-Hartley彗星,实施采样返回任务,预计2028年返回地球,探测器如图29所示。
Triple F任务拟在彗星表面不同的位置获取至少3份样品,其各个采样位置具有不同的活动水平及地形特点,冰层覆盖区域或活动区域作为首选采样点,然后将采集非活动区域样品,以便与活动区域样品进行对比,最后将对光照较少区域(如极区)进行采样。此外,Triple F任务采样点选择时还将考虑采集类似Tempel 1彗星的平坦区域,研究认为这类区域的物质很可能源于次表层喷发。
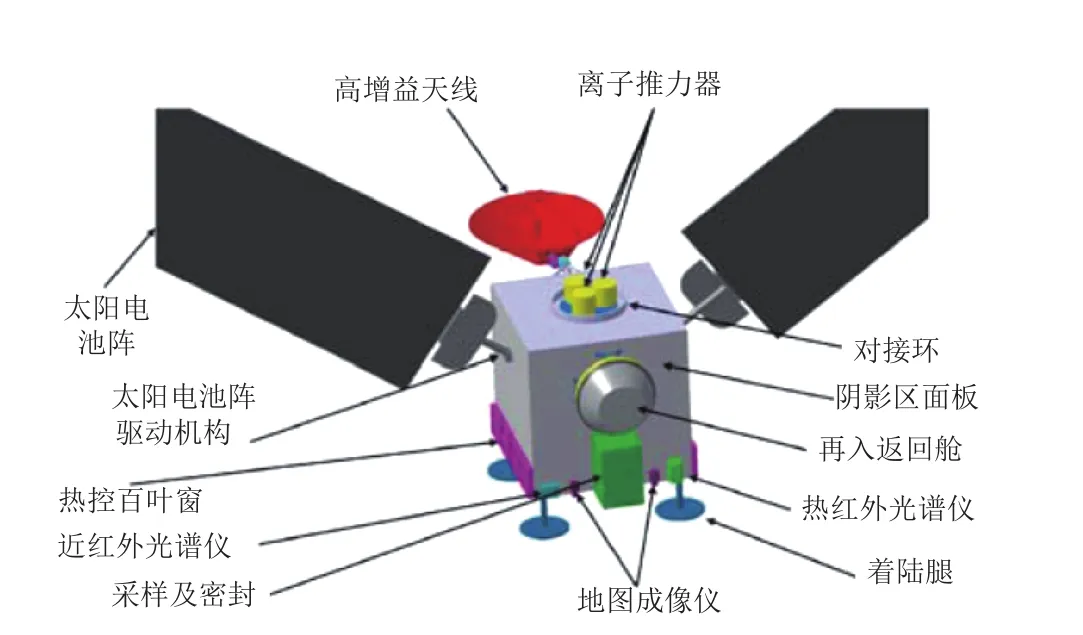
图29 Triple F探测器示意图Fig. 29 Triple F detector
Triple F任务认为采样方式应重点保护样品的结构、组成不发生变化,在采样过程中施加的作用力应不超过大多数样品的张力、压缩强度和抗剪强度,因此该任务采用了具有非扩散特性的薄壁采样软管,如图30所示是采用内径7.5 mm,壁厚0.25 mm的塑料管采集得到的彗星模拟物样品。试验表明尽管样品的压缩强度小于500 Pa,但距采样器壁大于1 mm的孔洞结构没有发生改变。
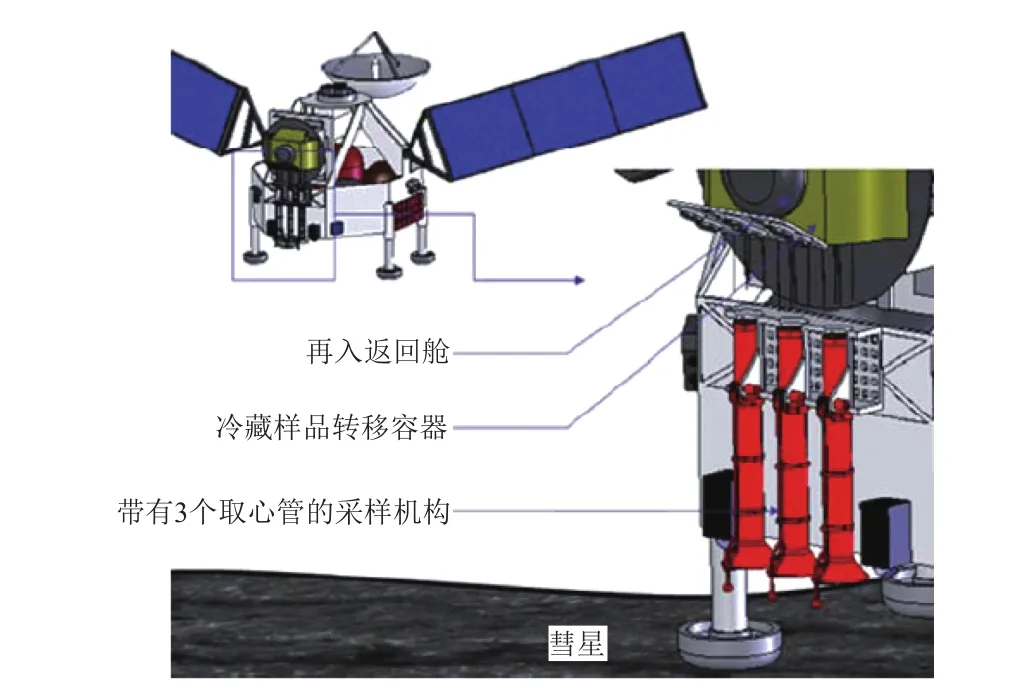
图30 Triple F采样装置示意图Fig. 30 Triple F sampler
在采样机构的采样能力设计方面,Triple F任务结合深度撞击Tempel 1彗星情况及理论分析认为,彗星的张力或抗剪强度约为1~10 kPa,抗压缩强度约为10~100 kPa,其采样机构可适应强度为1 MPa的样品物质。
Triple F任务探测器也采用TAG方式进行采样,采样时间不大于2 s,该任务拟采用香港理工大学的设计,该设计也继承了Beagle 2的设计。Triple F采样装置有3个芯管,可完成3个不同区域的彗核样品采集,芯管直径为5 cm、长度为50 cm、壁厚0.5 mm,质量为200 g。通过弹簧机构(继承Philae的弹射机构)刺入彗星表面,弹簧可将芯管速度加速至12 m/s(为提高刺入速度,也考虑采用Philae鱼叉的投射气体发生器,可使其速度达到90 m/s)。由于芯管在采样过程中,下端为开敞设计,为防止转移过程中样品洒落,在芯管底部设计了阻挡机构。
样品采集完成后,样品直接被转移到返回舱中的冷藏样品容器中,由于样品采用完全独立的冷藏炉,可以避免样品的交叉污染。Triple F任务认为在活动区域,样品采集深度达到50 cm就可以找到水冰,考虑样品密度约为500 kg/m3,采用高度为50 cm、直径为5 cm的圆柱体样品容器,可获得约500 g彗星物质。为保证样品的微观结构部发生变化,任务返回过程中对样品进行密封,并对温度进行严格控制,样品将处于133 K的温度环境下,返回地球2 h内温度将升至163 K左右[26]。
比较有代表性的7次小天体采样任务主要指标和采样方式设计汇总如表1和表2所示。
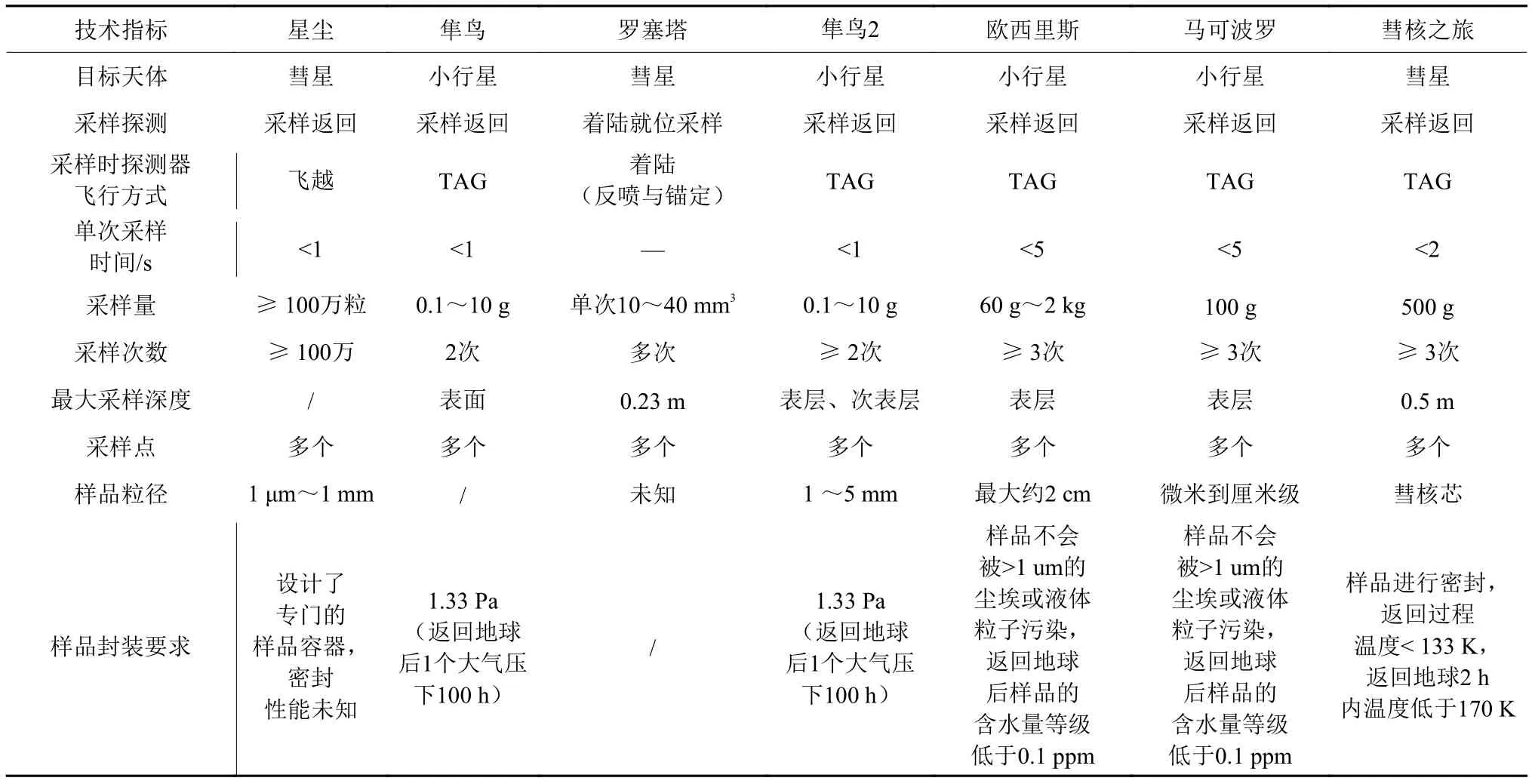
表1 国外小天体采样与表面操作主要指标对标Table 1 Main indexes of sampling and surface operation of foreign small celestial bodies missions
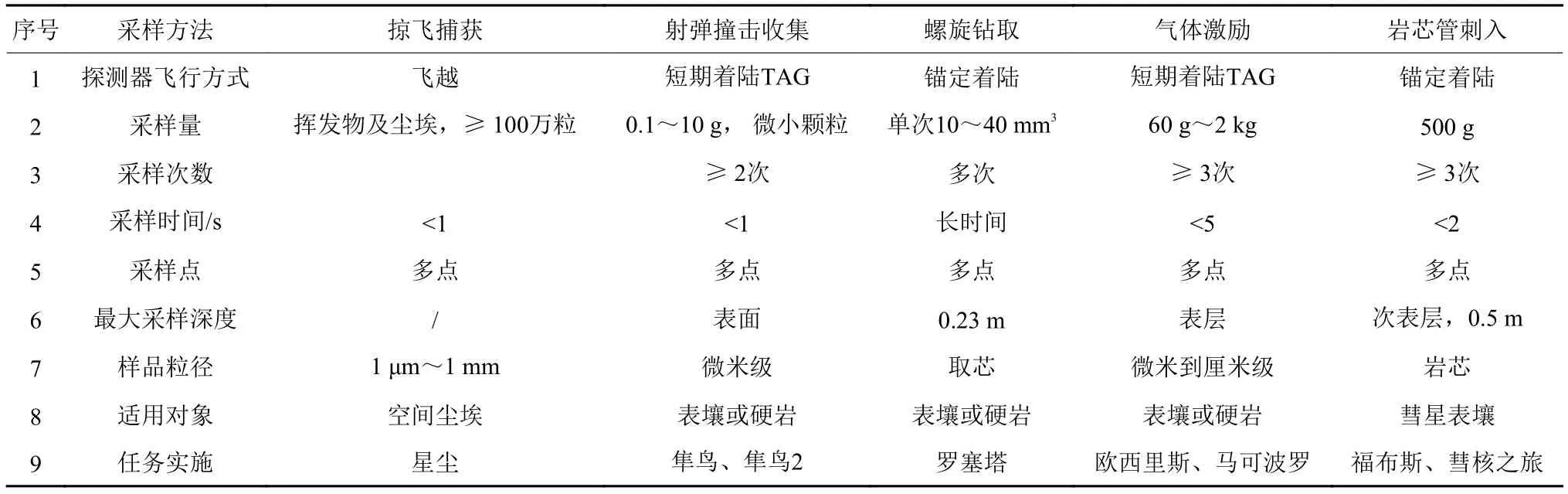
表2 采样方式汇总Table 2 Summary of Sampling methods
根据对各国小天体探测任务的调研来看,小天体采样探测主要有以下形式:①掠飞捕获。由于捕获粒子的速度可能较大,需对采样装置以至于整个探测器进行特殊的防护设计或选用特殊材料进行样品采集;②短期着陆采样。主要采用TAG方式,如“隼鸟号”“隼鸟2号”“欧西里斯”“马可波罗”;③长期着陆获采样品。如“菲莱”着陆器,由于小天体表面低重力影响,需通过特殊方式进行固定。
从未来小天体探测任务发展趋势来看,采样返回将是后续小天体探测任务的主要形式,相比于飞越探测和着陆就位探测采样返回探测的技术难度最大,由于可以利用地面实验室对样品进行充分的分析研究,所以科学价值最高,可以获得的信息和科学成果最多,探测效益和科学回报最大[27-28]。
3 小天体环境及采样技术需求分析
小天体特性较为复杂,存在较大的不确定性[29],通过小天体特性与前期采样任务调研可以分析得出以下影响采样作业的主要因素。
1)微重力:小天体体积与质量很小,致使表面重力很小,约比地球小4~5个数量级。在几乎没有重力的小天体上,要实现长期着陆非常困难,而采样施加的力可能将探测器推离小天体。因此,这一特征决定了传统的钻孔取样、挖掘取样等方法难以应用,需要采用新型的取样方式,且要求采样作用力小。
2)地质情况复杂且不确定:小天体种类繁多,不同小行星的地质情况也有很大不同,有的表面覆盖土壤,有的表面是巨大的金属质岩石或坚硬的玄武岩,有的表面碎石松散地堆集,孔隙极多,有的表面覆盖冰层或冰土混合物。即使确定探测目标小天体,在取样器着陆取样前并不完全了解地质特性,取样对象具有不确定性。因此,要求取样器具有很强的适应性,能够对具有不同特性的地质进行取样。
3)探测器着陆方式不确定:探测器着陆方式分为短期着陆(TAG)与长期着陆,短期着陆要求采样时间较短,长期着陆要求可靠锚定。目前着陆方式尚未确定,因此采样设计需兼顾两种着陆方式。另外,小天体表面形状不规则,存在陨击坑、陡坡或隆起,因此要求采样器设计灵活,能适应不同着陆姿态,并具有多点多次采样能力。
4)表面低温环境:根据已知数据,多数小天体太阳直射区在0 ℃左右,冬季极区在–100 ℃左右,可以暂定采样器热设计指标–120 ℃~50 ℃,可覆盖大多数小天体表面温度。
5)真空环境:小天体表面没有大气的存在,无法利用空气对流进行冷却。因此许多机构进行真空润滑以及冷却热设计。
6)通信距离远:小天体距离地球较远,在采样执行过程中,与地面指控中心存在较长时间的通信延迟(例如“隼鸟号”16 min的时延,“罗塞塔号”需要约28 min的延迟)。因此小天体采样过程中,需具备在轨实时处理的能力,并高度自主地控制,有序完成采样任务。
基于以上分析,在进行小天体采样技术工程研究中,将采样关键技术进行了分析,如表3所示。
4 分析与启示
结合目前已实施或计划实施的小天体采样探测任务情况,我国在小天体采样技术研究中应关注如下要素:
1)新型、异构、多样化复合的采样技术研究
小天体采样方式的确定和预定的科学目标具有重要关联,对于掠飞捕获,由于被捕获粒子的速度可能较大,需对采样装置和整个探测器进行特殊保护设计确保安全;对于一触即走的采样方式,需对探测器逼近、接触过程进行合理的设计,采样装置应具有高效可靠的瞬时采样能力;对于长期着陆,应在着陆作业前通过地面观测及环绕探测,确定目标天体的基本情况,尽可能减少采样的不确定性。
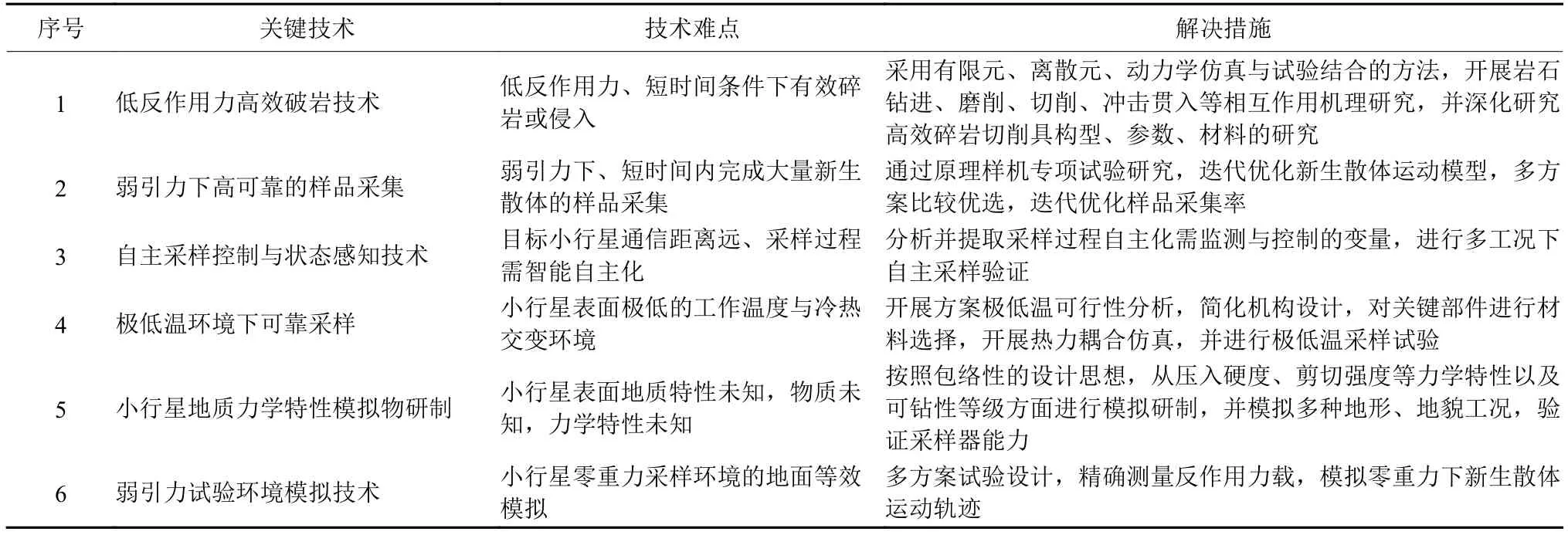
表3 采样关键技术Table 3 Key techniques of sampling technology
我国目前针对月球采样开展钻探、铲挖两种采样方式的研究,形式相对单一,需结合小天体环境特点,开展低功耗、轻量化、高可靠、快速的多种采样技术研究。
2)不确定性星表的包络化采样设计
未来小天体探测目标可能涉及S型小行星、M型小行星、C型小行星、彗星等,目标天体特性存在差异性。由于地面观测能力的限制,探测器抵达目标前可能目标状态都具有很大的未知性。因此在关键技术攻关过程中,应采用包络性设计思想,使采样作业能力覆盖松软土壤、碎石颗粒、岩石、金属岩石、冰层等不同对象。
3)表面自主控制技术研究
小天体探测目标距离地球一般较远,探测仪器和采样装置工作过程中,与地面指控中心存在较长时间的通信延迟,容易引发意外事故。例如,Hayabusa在开展采样之前,释放了Minerva纳巡视器,但由于16 min的时延,导致着陆失败、设备损坏。因此,小天体采样过程中,需具备在轨状态实时处理的能力,高度自主且有序地完成各项作业操作。
4)高可靠着陆固定技术研究
小天体采样探测任务中,一般有3种形式:①是掠飞,如Stardust、Genesis;②是一触即走,如Hayabusa 1、Hayabusa 2、Osiris-Rex、Marco Polo-R;③是长期着陆采样,如Rosetta。从国外正在规划的未来任务来看,长期着陆采样将扮演更重要的角色。由于小天体表面低重力特点,可靠的固联方式是保证采样成功的前提条件。Rosetta任务采用冷气反推、鱼叉装置、着陆腿冰螺栓组合方式固定,实施结果并不理想,冷气推力器出现故障,鱼叉装置发射失败,仅有冰螺栓实现了一定程度的固定,导致着陆器发生了两次弹跳,3次才着陆的情况,最终偏离预定着陆点约3 km,致使太阳光照时间大幅下降,引发备用蓄电池供电不足风险。可见,高可靠的探测器固定方案对小天体采样探测成功至关重要。
本文通过调研小天体表面特性以及国外小天体采样技术研究现状与成果,总结了小天体环境对采样探测的特殊要求,归纳了小天体表面弱引力条件下采样探测具有低反作用力、轻量化、小型化、低能耗化,需适应附着与接触探测模式等特点,提出了对小天体采样探测的技术需求,为对小天体采样探测技术深入研究提供支撑。
