虚拟机构创新设计实验平台的研究与实现
2018-11-01张小粉
淮 妮,金 莹,张小粉
(咸阳职业技术学院机电学院,陕西 咸阳 712000)
随着计算机技术的发展,机械创新设计已经在传统经验性创新的基础上逐步转向为计算机辅助机械创新设计。而机构是机械产品的骨架,机构创新设计是机械产品创新设计的基础。计算机辅助机构创新设计可以帮助机械设计人员快速地完成设计任务,并通过可视化显示,直观地分析机构设计方案[1]。另外,建立一个机械创新设计实验室需50万元以上的资金,对于多数高职院校比较困难,而虚拟机构创新设计实验平台其功能与物理实验室一样,却只需几千元资金。因此,研究虚拟机构创新设计实验平台,首先可以丰富高职院校“机械设计基础”课程的实验资源,提高学生的机械创新设计能力;其次,方便企业机械设计人员整体、全面地分析机构创新设计的方案,从而进一步提高机构创新的水平。
1 计算机编码表示法
计算机辅助机构创新设计的关键技术是为机构知识寻找计算机能够识别的数学模型[2]。计算机编码方法是通过对机构的运动行为、机构的运动转换功能属性建立一套关键字定义规则,然后对其主关键字进行计算机编码,从而实现机构特征的形式化表达。
1.1 机构运动行为四位编码
机构的运动行为一般指运动类型、运动的连续性、运动速率、运动方向4项基本特性。对机构运动行为可以用四位编码来表示(位次与相应运动属性必须对应),见表1。
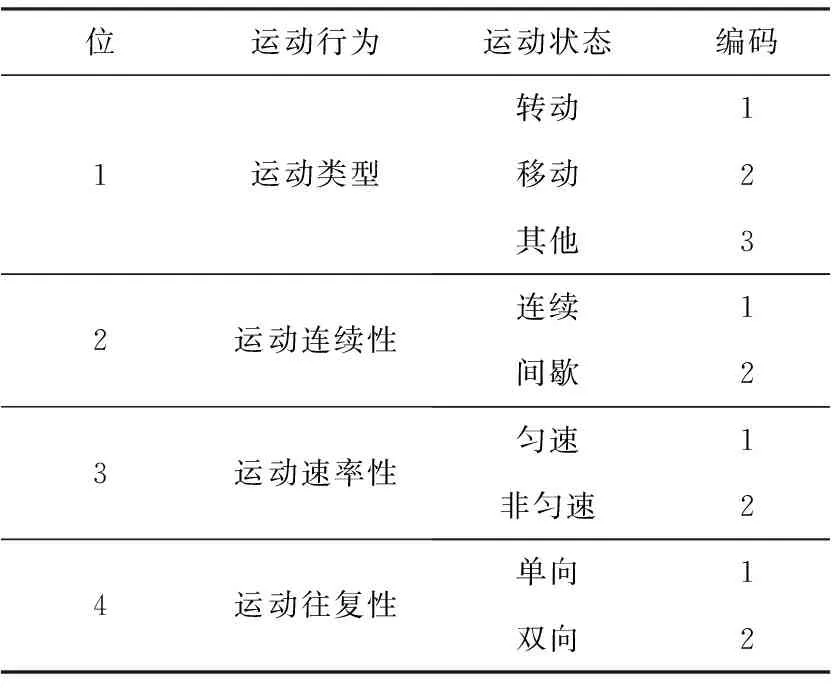
表1 机构运动行为的四位编码
1.2 基本机构运动转换功能属性编码
运动行为既可以是输入运动,也可以是输出运动,由输入和输出运动行为组成了基本机构的运动转换功能属性,因此对输入和输出运动行为的四位编码就是对基本机构的运动转换功能属性的表达,见表2(四位编码位次必须和表1一致,不可打乱)。
2 软件系统架构
该系统软件是通过输入程式化的任务需求,对数据库进行搜索匹配,得到符合要求的机构解并可视化演示,虚拟平台软件系统架构如图1所示[3]。
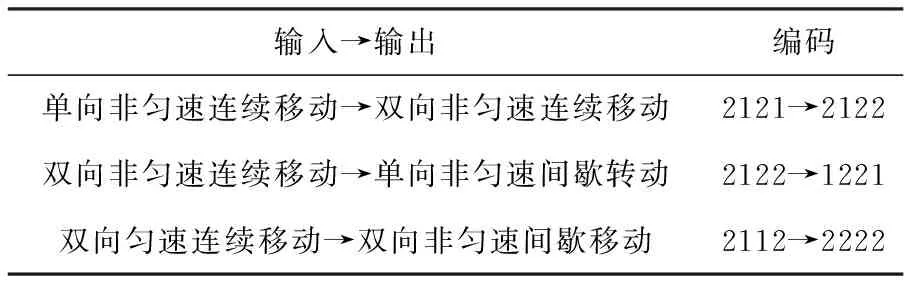
表2 机构运动转换功能属性编码
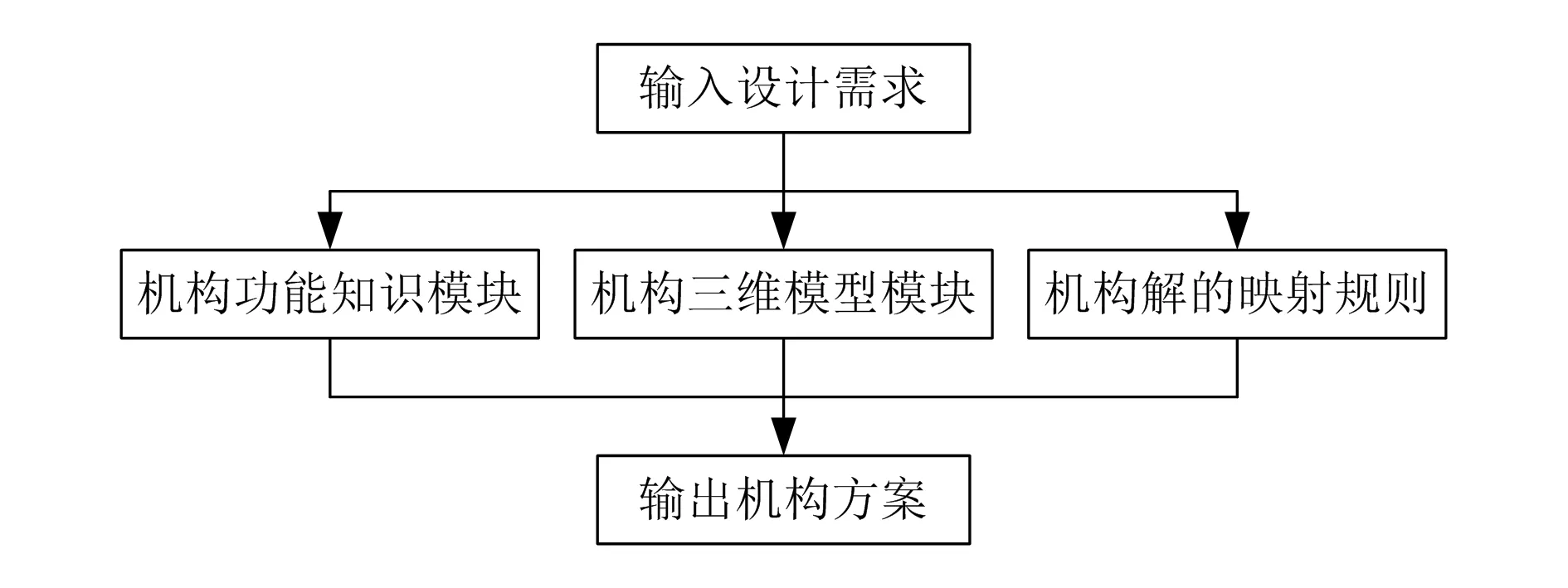
图1 虚拟平台软件系统架构图
各结构模块承担的任务分别为:1) 输入设计需求,输入给定设计任务的程式化符号;2) 机构功能知识模块,即建立的机构功能知识数据库,供系统搜索匹配四位编码;3) 机构三维模型模块,即建立的机构三维模型库,供系统可视化显示;4)机构解的映射方法,即搜索和匹配机构功能知识数据库的规则,通过此规则可实现机构功能到机构解的映射;5) 输出机构方案,将满足需求的机构方案以文字和可视化方式输出。
3 数据库的建立
根据设计需求得到相应的机构解的过程实际是对数据库搜索和匹配的过程,因此需要建立相应的机构知识数据库[4-5]。根据系统结构,需要建立两个数据库:1)机构知识数据库,包括两个表。①基本机构运动行为表,具体包括4个字段,即运动的类型、连续性、速率性、往复性;②机构功能属性表,具体包括12个字段,即机构序号、机构模块名称、输入属性四位编码、输入属性1~4、输出属性四位编码、输出属性1~4。该数据库建立了常见基本机构的功能信息。2)机构三维模型库,具体包括3个字段,即机构序号、机构模块名称、三维模型存储地址,该数据库建立了常见基本机构的三维模型。
4 机构解的映射方法
根据以上创建的数据库,只需要建立一套对数据库搜索、匹配的方法,则可实现从机构功能到机构解的映射[6-7]。具体方法如下。
4.1 直接匹配
例如,要实现“单向匀速连续转动→单向匀速连续移动”的运动功能转换,可直接搜索相应的输入编码1111、输出编码2111,得到的部分单一机构解见表3。
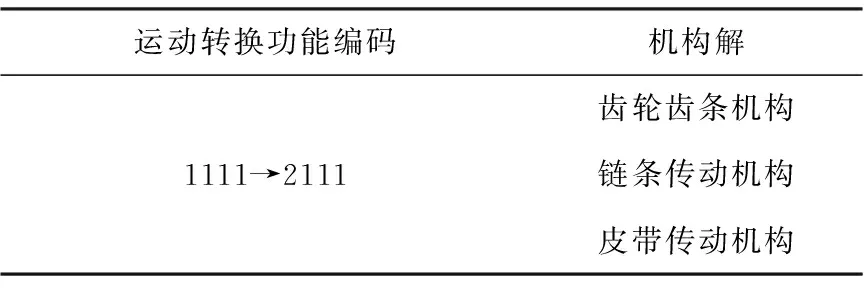
表3 1111→2111运动转换部分单一机构解
4.2 拆分匹配
例如,要实现“单向匀速连续转动→往复间歇移动”的运动功能转换,搜索相应的输入/输出四位编码为“1111→2222”,没有得到相应的单一机构解,则需要进行拆分匹配。首先搜索输入为1111的基本机构,得到的部分机构解见表4。其次搜索输出为2222的基本机构,得到的部分机构解见表5。最后将表4输出编码和表5的输入编码进行对照,查看是否存在相同的编码,有则表示有解。如表4与表5可得到“1111→1222+1222→2222”和“1111→2112+2112→2222”两组解,即将曲柄滑块机构的输出端与凸轮滑块摆杆机构的输入端进行串联组合成新的机构,将凸轮摆杆机构的输出端与摆杆滑块机构的输入端进行串联组合成新的机构。
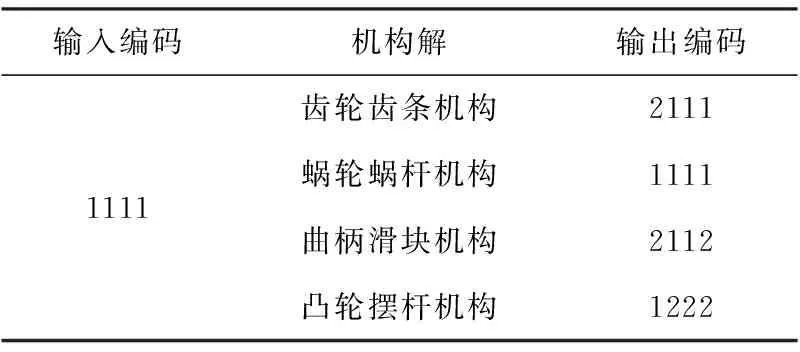
表4 输入为1111的部分机构解
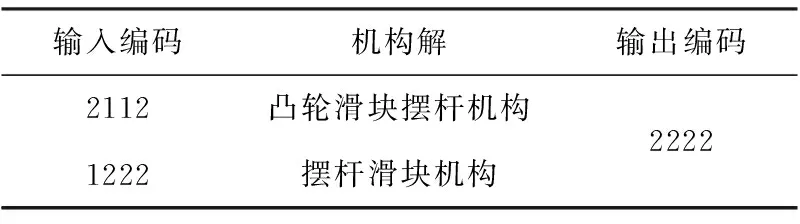
表5 输出为2222的部分机构解
5 应用实例
本文以.NET 为工具开发了虚拟机构创新设计实验平台系统软件[8]。以某一任务需求为例操作系统软件。
任务需求:设计一个薄膜包装设备的机械臂。电动机直接驱动,通过一些机械传动装置后,使机械臂做非匀速的上下往复运动,无其他特殊要求。第一级动力传递用万向连轴器,要设计的部分是连轴器到机械臂的机械装置,设计任务经抽象化后为:将“连续单向的匀速转动”转换为“连续双向的非匀速移动”。
具体过程如下:
1)分析任务需求。运动转换为“连续、单向、匀速转动→连续、双向、非匀速移动”,四位编码为“1111→2122”;2)运行系统软件,选择输入形式1111、输出形式2122;3)点击 “单一机构”按钮,系统自动搜索机构知识数据库,直接匹配对应的输入输出编码,得到的单一机构解如图2所示,若选中曲柄滑块机构,再点击“立体模型”按钮,则系统自动搜索机构三维模型库,即可直接打开曲柄滑块机构的三维模型,如图3所示;4) 点击 “组合机构”按钮,系统自动搜索机构知识数据库,拆分匹配对应的输入和输出编码,得到的组合机构解如图4所示,若选中齿轮曲柄滑块串联组合机构,再点击“立体模型”按钮,则系统分别搜索齿轮机构和曲柄滑块机构的三维模型,并利用三维软件的自动装配功能将得到的单一机构三维模型进行虚拟装配,即可看到齿轮曲柄滑块串联组合机构的三维模型,如图5所示。
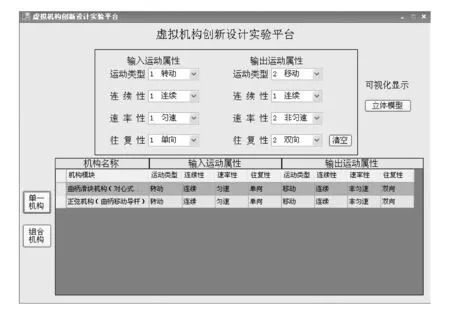
图2 单一机构解
按照以上设计需求操作实验平台系统软件后,得到的机构解共有5个,其中2个单一机构、3个串联组合创新机构。后期使用过程中,学生可通过旋转三维模型,直观地了解每个机构的结构特点;对于机械设计人员,可对5个机构直观地进行分析对比,择优选用。

图3 单一机构三维模型
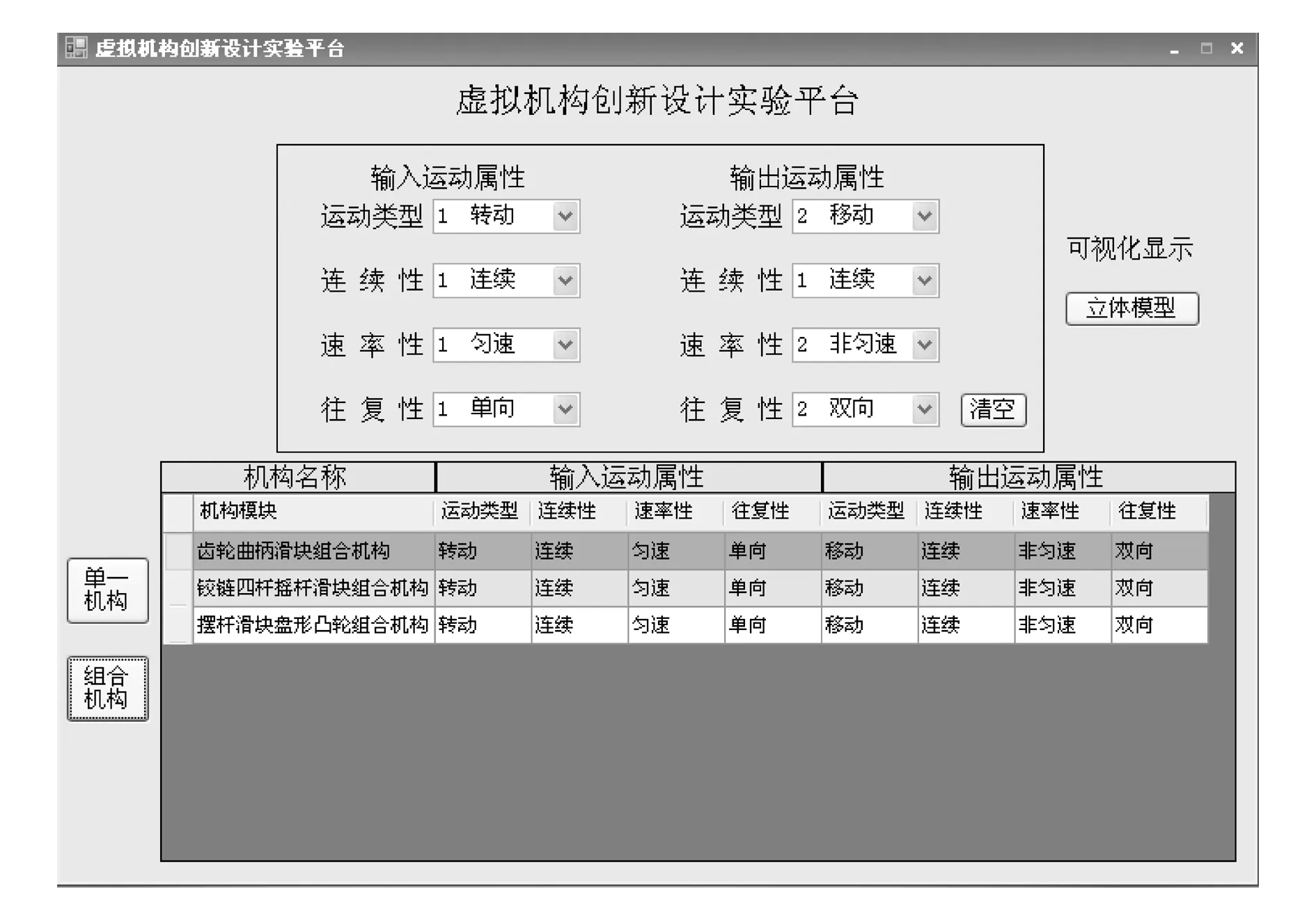
图4 组合机构解
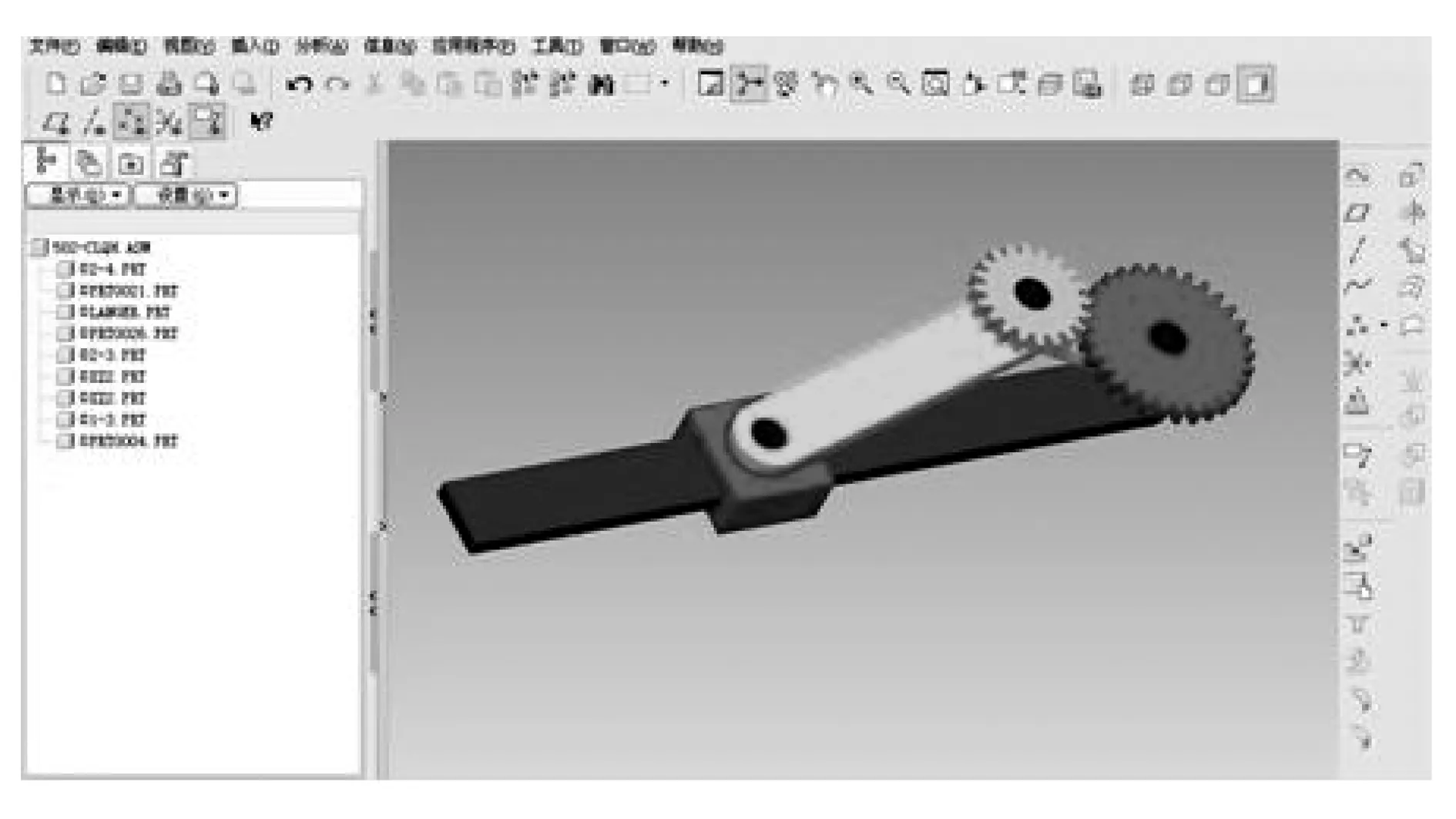
图5 组合机构三维模型
6 结束语
本文用计算机编码的方法建立了机构知识数学模型,提出了一种拆分后搜索匹配的机构功能到机构解的映射方法,以.NET为工具开发了系统软件,并按照一定的设计需求,实际操作软件系统后得到3个组合创新机构,成功验证了虚拟机构创新设计实验平台的可行性。但是该系统只分析了串联组合机构,没有对并联、叠加等复杂机构进行分析,只实现了虚拟机构创新设计的初级阶段,后续需不断完善,使其能得到更丰富的机构创新设计方案。
