矢量场逐次逼近的康复机器人柔顺交互控制
2018-11-01谢光辉金敉娜王光建吴晓金
谢光辉 金敉娜 王光建 吴晓金
近年来,脑卒中的发病率在全球范围内有逐年增加的趋势,而病例中最常见的是运动功能障碍,其将严重影响患者的日常生活,故如何恢复患者的运动能力是治疗中需要解决的首要问题之一.针对此问题,临床治疗中一般采用人工辅助训练和机器人辅助训练两种方式,但前者存在过度依赖治疗师、训练强度/时间无法保证、成效低等缺点,而后者却具有治疗师负担减轻、训练项目可调、效率高等诸多优点.因此,国内外对机器人辅助训练新设备、新技术进行了大量研究,催生机械结构多样、控制方法各异的康复机器人[1−5]相继问世,其临床应用亦表明机器人辅助训练能促进患者的运动能力恢复[6−8].但另一方面,应用中亦发现机器人在机械机构和控制方法上的表现还不太令人满意,特别是在人–机柔顺交互控制方面亟待有所突破.目前,康复机器人辅助训练的模式主要有被动训练和主动训练两种[9].前者主要针对早期肌力比较弱且自身运动较困难的患者对症施治,其下肢运动易于通过常规的机器人轨迹跟踪控制实现;后者主要应用于具有一定运动能力患者的自行训练,即机器人系统依据患者的主动运动意图,采用柔顺交互控制技术来提供辅助作用力给患者进行训练.而对于患者主动运动意图的获得,Pons[10]提出通过识别人–机相互作用力来得到患者的主动运动意图;佟丽娜等[11]采用识别表面肌电信号(Surface electromyogram,sEMG)的方法获得了下肢运动意图;Artoni等[12]提出一种脑电信号(Electroencephalogram,EEG)处理方法,可获得患者较准确的主动运动意图.事实上,无论采用哪种信号,关键是所构建的人–机柔顺交互控制策略能否有效地识别信号并获得患者真实的主动运动意图.对于人–机柔顺交互控制策略的构建,国内外一些学者采用基于力信号的阻抗控制(Impedance control)[13]对康复机器人进行研究并取得了一定成绩.比如,Riener等[14]设计了阻抗控制器并成功亦应用于LOKOMAT康复机器人中,且通过实验验证了该控制方法的有效性;孙洪颖等[15]采用阻抗控制策略在一定程序上实现了卧式下肢康复机器人主动柔顺控制;徐国政等[16]提出了基于力的模糊自适应阻抗控制策略,实现了人机相互作用力的控制.但在实际运用阻抗控制策略时,首先得根据人的运动轨迹(意图)来规划机器人的参考运动规迹,从而生成机器人期望规迹.然而康复机器人在工作过程中,不通过特定而有效的识别方法是很难获得人真实运动意图的.因此,目前用阻抗控制策略来实现较高的人机柔顺交互还有一定的难度.另外,研究者们利用生物产生节律运动的中枢模式发生器(Central pattern generator,CPG)[17−19]原理构建神经元振荡器,并将其用来识别力信号或表面肌电信号.吴德明等[20]利用神经元振荡器来识别人–机相互作用力以获得人的运动意图,实现了人和机器人握手的自然交互;彭亮等[21]亦利用神经元振荡器对下肢表面肌电信号进行识别,获得了患者的运动意图,成功实现了下肢康复机器人的柔顺交互控制.以上研究之所以能实现人机柔顺交互,主要是因为神经元振荡器具备输入输出同步特性,其可用来识别并同步力信号或表面肌电信号,但其内部有许多参数相互耦合,不易找到合适的参数匹配来实现同步,而且它只适合周期运动情景.为进一步探索实现康复机器人和人之间柔顺交互的较简单控制方式,谢光辉等[22]曾利用大脑信息处理的非线性动力学机理[23]设计了矢量场逐次迭代算法,但仅通过仿真简单地验证了该算法在助力机器人控制上的有效性.有鉴于此,这里针对康复机器人辅助训练模式的特点,扩展该算法提出了一种康复机器人柔顺交互控制模型,其既可用于被动训练,又可用于主动训练,且在主动训练中可通过识别力或生物医学信号来获得患者的运动意图.同时,为验证该模型的有效性,自行设计了新颖的穿着型下肢康复机器人做为实验研究平台.
1 柔顺交互控制模型
矢量场逐次逼近的康复机器人柔顺交互控制模型如图1所示.其中,矢量场逐次逼近系统的合理设计是关键,其需具备输入输出同步特性.该模型控制策略为:当康复机器人施行辅助训练时,由传感器检测的机器人关节扭矩经重力补偿或生物医学信号(包括sEMG 或EEG 等)经滤波、归一化[11−12,21]等处理后作为矢量场逐次逼近系统的输入.由于该矢量场系统具有同步特性,其会识别输入并输出在振幅、频率及相位上与输入信号保持同步的关节期望位移θR,从而获得人的运动意图.同时,采用PD(Proprtion derivative)控制来实现机器人各关节的实际位移θR与期望位移θd的跟随,以实现机器人与人的柔顺交互.另外,通过调节系统的各参数值,既可改变主动训练的柔顺性,又能由主动训练转换到被动训练.
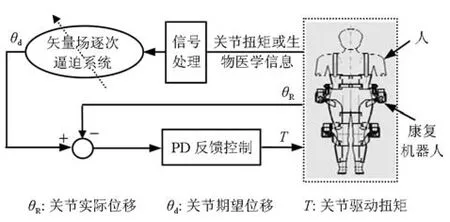
图1 柔顺交互控制模型Fig.1 Compliance interaction control model
1.1 矢量场逐次逼近系统
矢量场逐次逼近系统的算法原理是在任意的机器人目标轨迹(吸引子)周围设计矢量场,然后用逐次逼近的多项式去近似它,最后得到高度非线性且具备自振动特性和输入输出同步特性的矢量场逐次逼近系统.该算法的设计进程如下:
1)如图2所示,任意构建一目标规迹(吸引子)F,其为时间的离散函数,各离散点如下:

2)如图3,在区域D内设计从任意样点Xh指向目标轨迹F的单个矢量Vh(h=1,2,···,s),其定义如式(2)所示,类似这样的多个矢量组成矢量场.

这里,X[k]表示位于目标轨迹F上且距点Xh最近的点;α(0≤α≤1)决定矢量Vh收敛于目标轨迹F的程度,且其值越小,Vh收敛于F的速度越快.
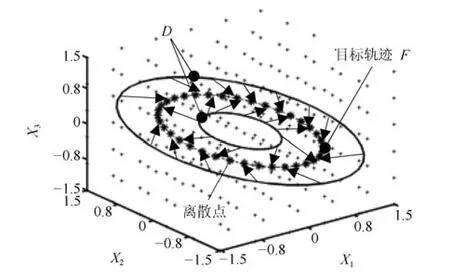
图2 矢量场Fig.2 Vector field
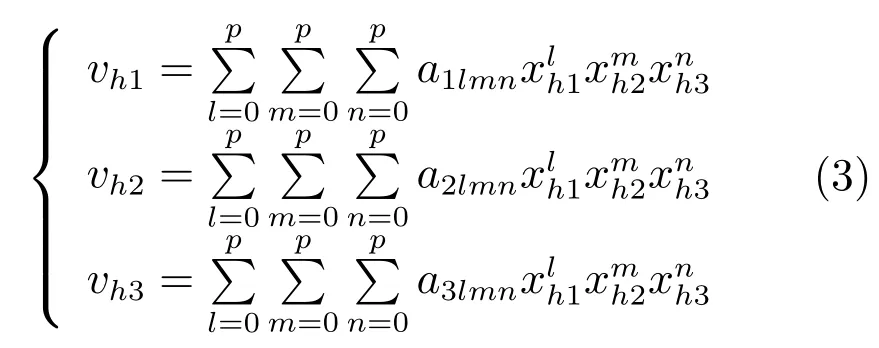
3)对于式(2)所提出的矢量Vh,可以用多项式去近似它.当X∈R3,设该多项式如下:
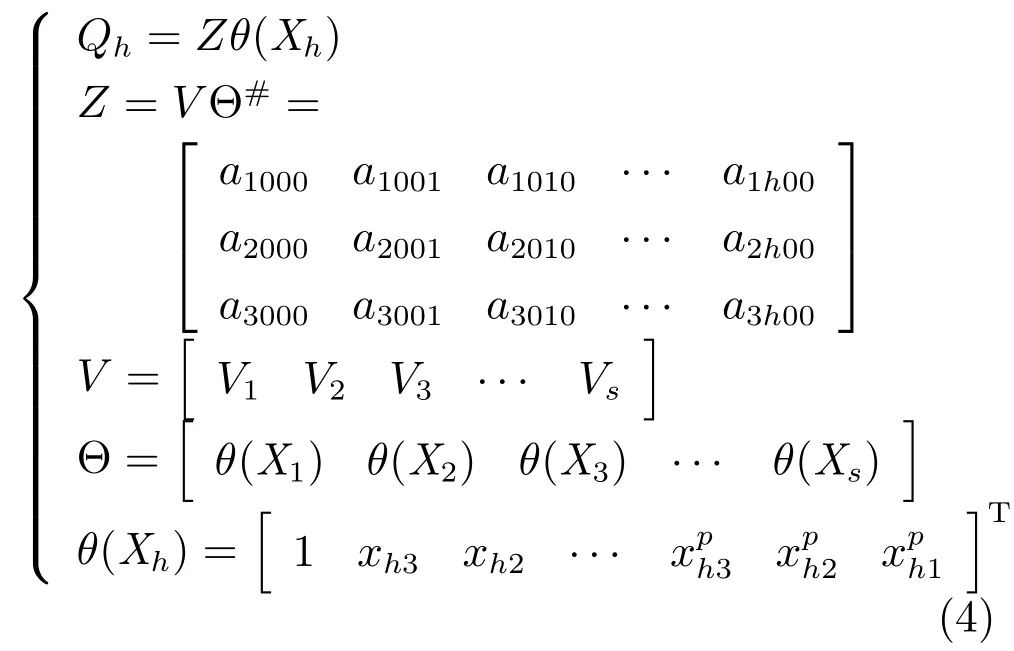
4)为使系统具备记忆与学习能力,如式(5)所示,对矢量场进行逐次逼近设计.
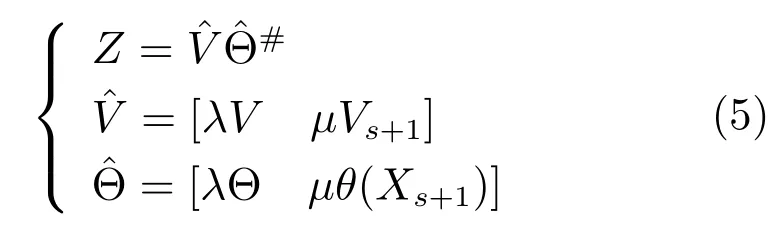
这里,Xs+1表示扭矩输入信号并作为新样点,Vs+1表示与样点Xs+1相对应的矢量(按图3建立),λ为遗忘因子,µ为同步阈值.取0≤λ≤1、0≤µ≤1,并采用最小二乘法可得:
这里,Zs+1表示更新后的多项式系数矩阵.

图3 矢量定义Fig.3 Vector definition
所设计的矢量场逐次逼近系统,当某一时刻有新的检测信号Xs+1输入时,原矢量场V将被更新到新矢量场,这样系统的多项式系数矩阵Z将被辗转到新的Zs+1,以得到与矢量Vs+1相近似的多项式Qs+1,再根据式(2)计算出与Xs+1相近的输出信号;同时该输出信号与输入信号能取得同步,且同步程度可由遗忘因子和同步阈值进行调节.
1.2 特性分析
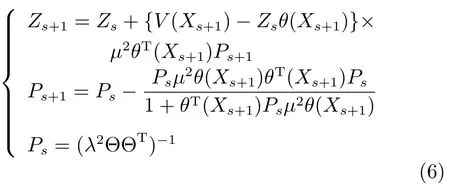
不失一般性,根据第1.1节的进程1)构建如式(7)所示的吸引子,并基于此分析上述矢量场逐次逼近系统特性.
式中,b为振幅;ω为角速度.
1)自振动特性
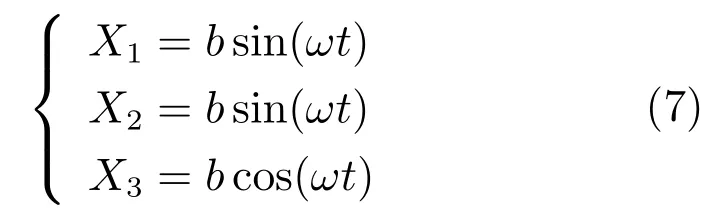
为分析矢量场逐次逼近系统的自振动特性,首先根据式(7)构建如图4所示的吸引子1和吸引子2,且在频率和振幅上将前者设计成比后者大,从而得到两个不同的的矢量场系统V1和V2.然后,将V1和V2各自的同步阈值µ都设为零,而遗忘因子在0∼1范围内取任意值.从图5可看出V1和V2都能自动输出振荡波,且这些波形在频率和振幅上各不相同,可称之为自振动特性.该特性可为康复机器人根据具体情况定制不同参考轨迹,以用于患者进行被动训练.
图4 不同矢量场设计Fig.4 Different vector field design
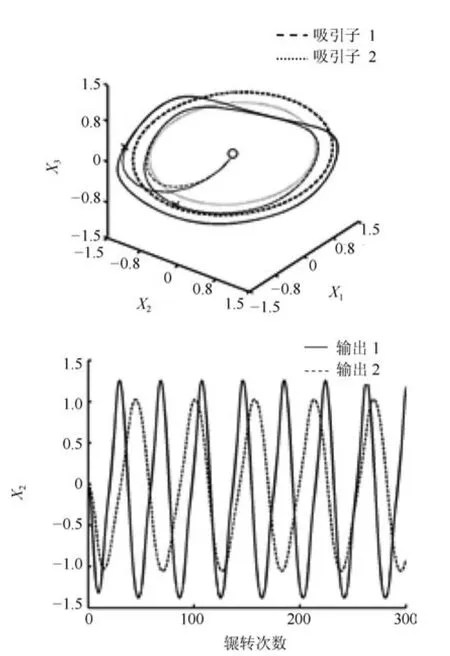
图5 不同矢量场的输出Fig.5 Output of different vector field
2)输入输出同步特性
当0<µ≤1且恒定时,矢量场逐次逼近系统具有输入输出同步特性,即输出波随辗转次数的推移逐渐与输入波在频率、振幅及相位上取得同步,输入输出同步程度由λ大小决定,且当λ越小时输入输出信号更易趋于同步,这可从如图6(a)∼(b)得出.

图6 取不同参数λ和µ时输入输出信号Fig.6 In-out signal with differentλandµparameters
此特性在应用中可将柔顺交互控制模型中的经信号处理模块处理后的信号作为输入,而矢量场逐次逼近系统的输出作为机器人的期望位移θd,以用于康复机器人主动训练,使机器人跟随患者的运动意图给予一定辅助力并同步运动.
2 实验与分析
2.1 实验平台及方法
1)实验平台
为验证第1节所提出控制方法在康复机器人主动训练中的有效性,根据人体下肢的运动特点,设计了如图7(a)、(b)和(c)所示的一种穿着型下肢康复机器人,该机构由左右两部分组成,每部分都有髋关节和膝关节各一个.为适应不同身高的人,将各连杆尺寸设计为可调.
图7(d)为关节位置示意图,左右腿各有5个自由度.其中,髋关节有4个自由度(子关节),标记为1、3、4和5,分别用作大腿屈伸、旋转、上下移动和内收外展功能;膝关节有1个自由度,标记为2,用于小腿屈伸.另外,除关节3、4、5外,关节1和2都配置有扭矩传感器和旋转编码器.
由于本康复机器人膝关节只有一个自由度,结构较简单,且驱动方式为通用的电机直驱型式,故这里只给出如图7(e)所示的髋关节结构示意图.图7(e)中,关节1由编码器、驱动电机、谐波部件、锥齿传动部件和减速箱组成,腿支架由锥齿传动部件带动旋转;轴承固定在腰支架上,与摇臂一起组成关节5,可绕腰支架旋转;减速箱与摇臂滑动配合,使关节1既可沿摇臂上下直线滑动,又可绕摇臂旋转.
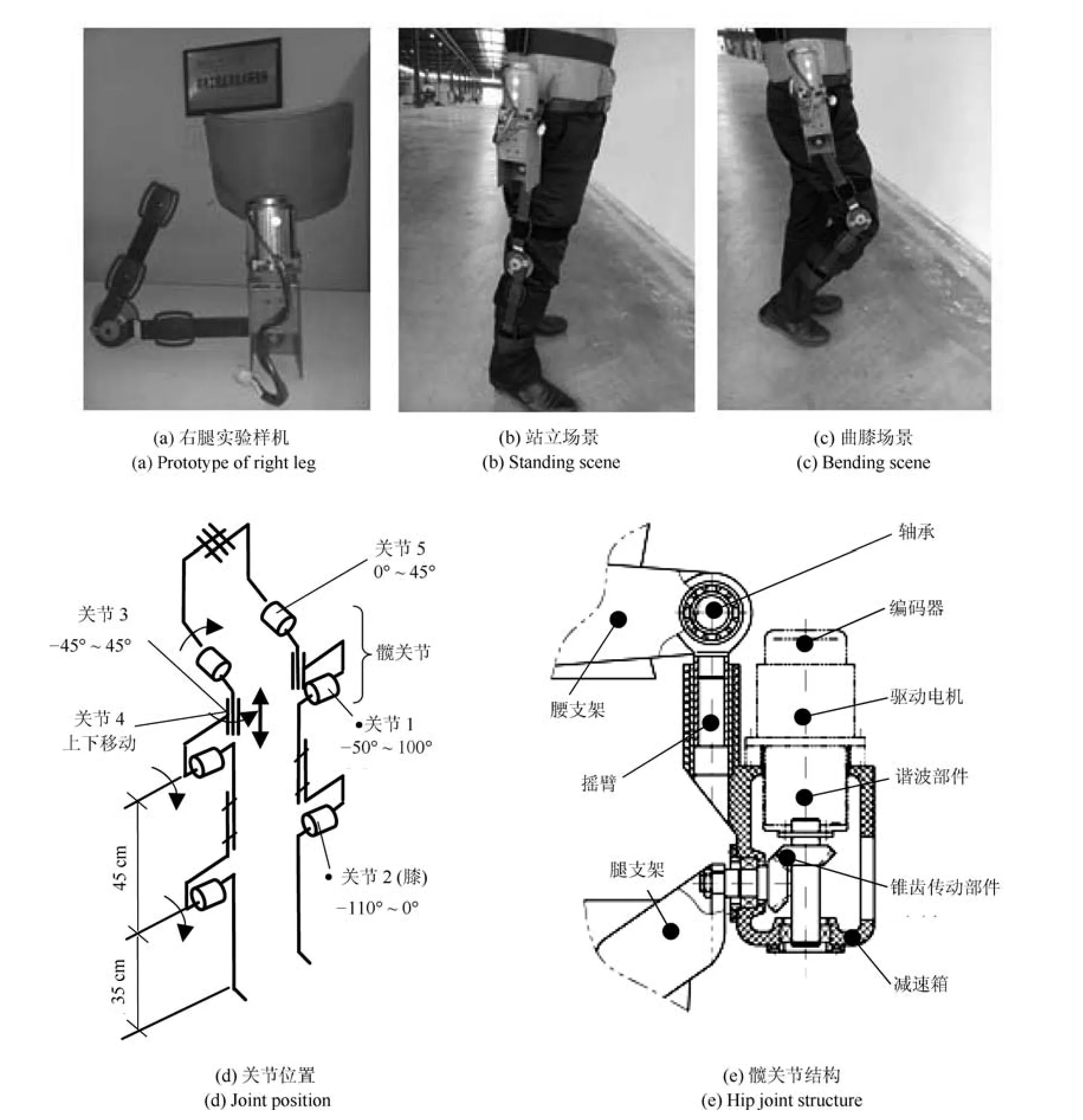
图7 实验平台Fig.7 Experimental platform
2)实验方法
在进行康复机器人主动训练实验时,将上述设计的康复机器人通过绷带绑在人大腿和小腿上,并根据穿戴人的腿长短进行位置调整.
不失一般性,这里以髋关节为例来验证第1节所提出的矢量场逐次逼近的柔顺交互控制方法在康复机器人辅助训练中的有效性.如图8所示,康复机器人辅助训练时所产生的关节扭矩被应变片检测出来,经信号放大器放大和A/D模数转换后传于计算机,然后经重力补偿(在第2.2节详述)后得到由于相互作用而产生的关节扭矩信号,并将其作为输入信号输入到矢量场逐次逼近系统,从而输出关节的期望位移(角度).机器人髋关节的实际转角位移由编码器进行检测,所检测数据经插于计算机里的计数器板卡传入计算机.而后,利用关节的期望位移和实际转角位移数据,通过PD控制计算后,计算机输出脉冲控制命令经D/A数模转换后来驱动电机转动,以实现实际转角位移与期望位移的跟随.
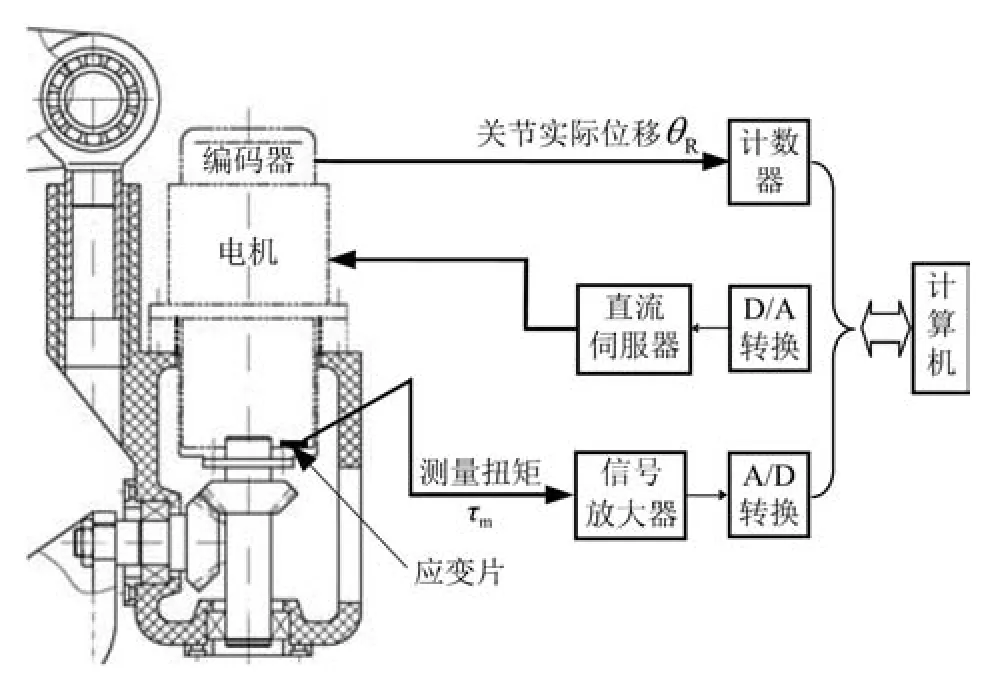
图8 控制系统硬件框图Fig.8 Hardware block diagram of control system
2.2 扭矩检测及分析
1)扭矩检测
为尽量减小康复机器人的体积和重量,各关节皆采用扭矩嵌入式检测的谐波部件[24]作为减速装置,该技术已在机器人关节中得以应用,被检测扭矩的线性精度可达±0.5%FS.
该谐波部件的扭矩检测原理如下:如图9所示,在谐波部件柔轮横隔壁的长轴上布置S1和S2一对应变片,短轴上布置S3和S4另一对应变片,每对应变片与半径方向呈45◦布置.这样,法向应力可以通过惠斯通电桥相互抵消而只检测到有用的剪切应力信号.各应变片所产生的信号如式(8)所示:
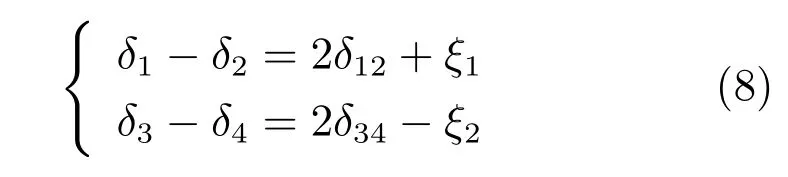
式中,δ1、δ2、δ3和δ4分别表示 S1、S2、S3和 S4应变片所产生的应变;δ12、δ34表示扭矩所产生的信号;ξ1=ξ2=Asin(2sϕ)为谐波函数所定义的调制信号;A为振幅;ϕ为旋转角度;s为齿轮配合系数,其表达式为s=(1−1/R),R为谐波齿轮减速比.
由式(8)可知,两对应变片在长轴和短轴方向上所产生的+ξ1和−ξ2信号是两个振幅相同但相位相反的信号,它们可以相互抵消,从而只检测到扭矩所产生的信号,然后将其通过放大器放大可得到关节的扭矩τm.
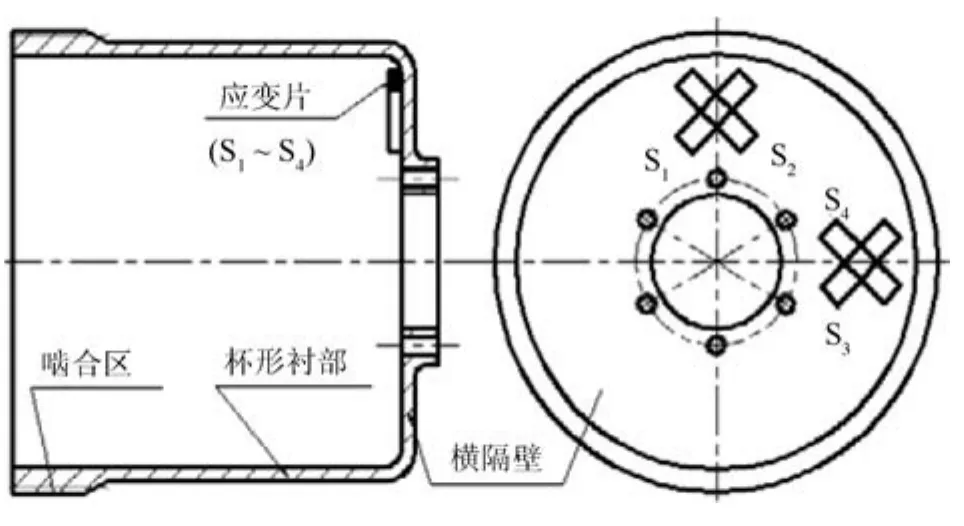
图9 控制系统硬件框图Fig.9 Hardware block diagram of control system
2)扭矩分析
由于在实际应用中传感器所检测到的机器人关节总扭矩包括重力矩、惯性矩、哥氏/离心力矩和人–机相互作用力矩等4成分,而矢量场逐次逼近系统的输入信号只需要人–机相互作用力矩,所以有必要把其他成分从总扭矩中分离出去.
对于重力矩,它的分离可采用重力补偿等方法来处理,而惯性矩和哥氏/离心力矩较难处理,但利用快速傅里叶变换(Fast Fourier transformation,FFT)对关节扭矩信号中各成分进行如图10所示的频谱分析后发现:哥氏和离心力矩相当小,对运动的同步影响较小;惯性扭矩主要包括5Hz以上的较高频率成分,而在辅助训练时,这些高频成分对产生运动同步的频率段(一般在0.2Hz~3.0Hz范围内)亦不会造成大的影响.
以上扭矩成分解析结果表明:当康复机器人进行训练时,传感器所检测的关节扭矩只需直接减去相关重力矩就可作为矢量场逐次逼近系统的输入.
3)重力补偿
式中,mk表示连杆k的质量;g为在基坐标系中的重力加速度向量;0Tk为第k坐标系相对于基坐标系的齐次变换矩阵;qi表示机器人第i关节的角度;kpk为连杆k的质心距离.
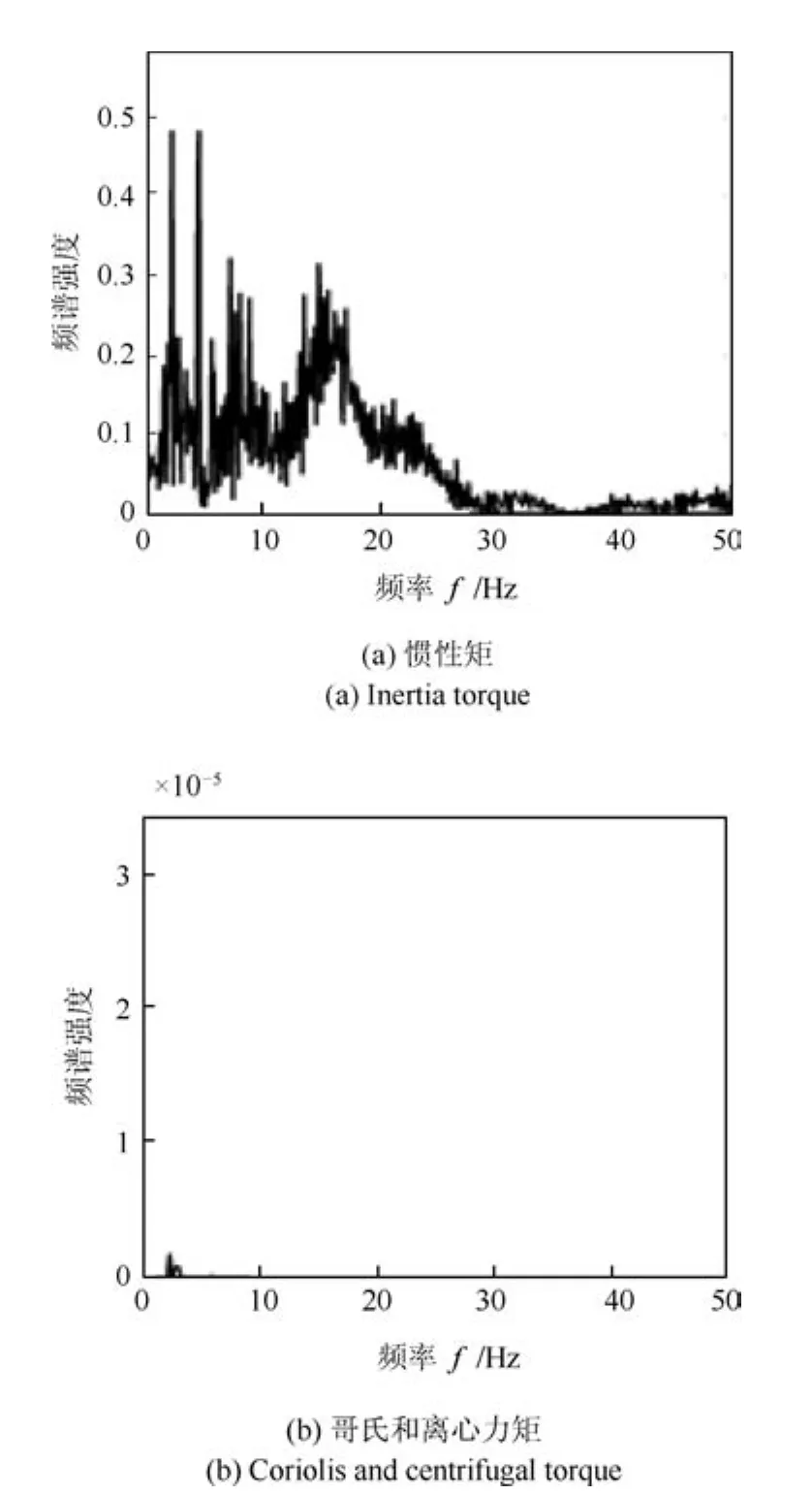
图10 关节扭矩的FFT分析Fig.10 FFT analysis for joint torques
从式(9)可知,要计算机器人腿髋关节和膝关节重力矩,必须事先知道它们各自的mkkpk参数值,而采用常规的计测方法难以获得该参数的较准确值,有必要对其进行参数识别.这里采用最小二乘法对该参数进行不解体实验辨识,其方法如下:
对于图7所示的下肢康复机器人髋关节1和膝关节2,由传感器检测的关节实际扭矩样本τ m(q)可用式(10)表示如下:
式中,n表示实验中各关节实际扭矩测量的样本次数,为髋关节1的第k次测量扭矩样本数据,为膝关节2的第k次测量扭矩样本数据.
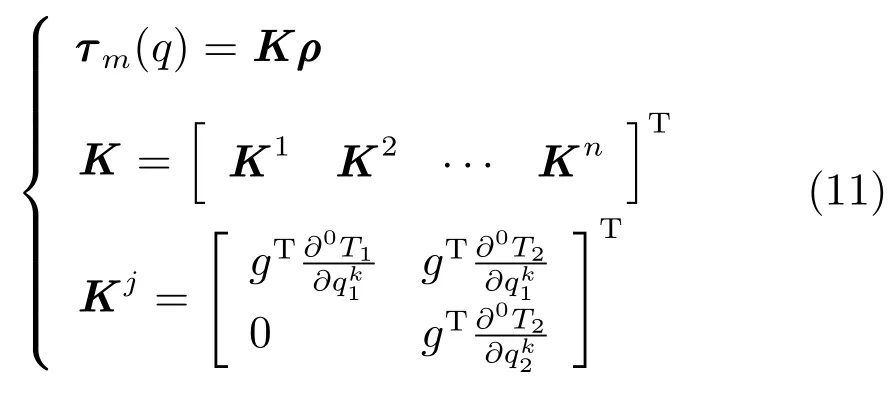

在按上述方法进行的参数识别实验中,从垂直位置到水平位置选取机器人腿的60个不同姿态,即取式(11)中n=60.对于每个姿态,在机器人处于静止状态下对各关节扭矩和角度值进行实测.这样,可得各关节连杆的参数mkkpk如表1所示.
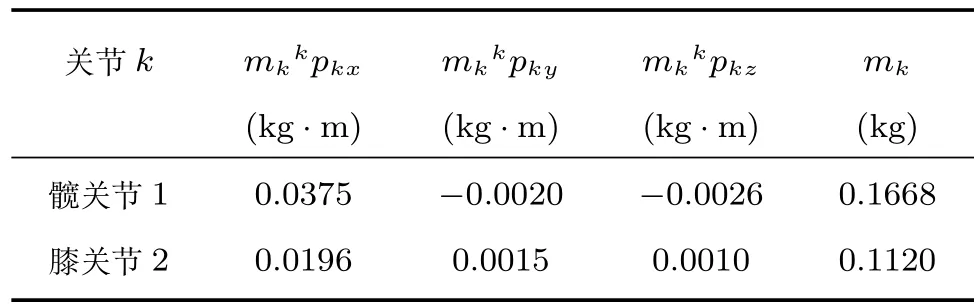
表1 参数辨识结果Table 1 Result of parameter identification
根据表1中得到的髋关节1和膝关节2连杆的参数值,可以由式(9)计算各关节重力项.图11表示了机器人大腿和小腿转动角速度在8rad/s低匀速情况下的髋关节1和膝关节2的扭矩实测值与计算值的比较.从图11中可以看出,进行参数识别后的关节重力矩计算值和实测值基本上是一致的.这说明,采用基于最小二乘法的不解体参数辨识方法来获得机器人各关节较准确的mkkpk参数值是可行的.
2.3 实验结果与分析
图12展示了康复机器人主动训练中当遗忘因子λ=0.2且同步阈值µ均为1.0时的人–机髋关节1处于摆动步态期的交互情况.在此参数情况下机器人关节的位移输出和人–机相互作用扭矩分别如子图12(a)、12(b)所示.机器人关节位移输出与人–机相互作用力矩的相位回归图∆ϕn+1=f(∆ϕn)如子图12(c)所示,从该子图可以看出,机器人关节位移与人–机相互作用力矩的相位基本上一致,即相位差大约在0rad附近,这时机器人与人的运动取得了同步,机器人与人交互积极.(相位回归图涵义:∆ϕn+1或∆ϕn分别表示两个输出之间在第n+1或第n个振动时的相位差,n=1,2,···;当 ∆ϕn+1= ∆ϕn时,表示两个输出的相位差保持一定值不变,说明频率一致;反之,则频率不一致).
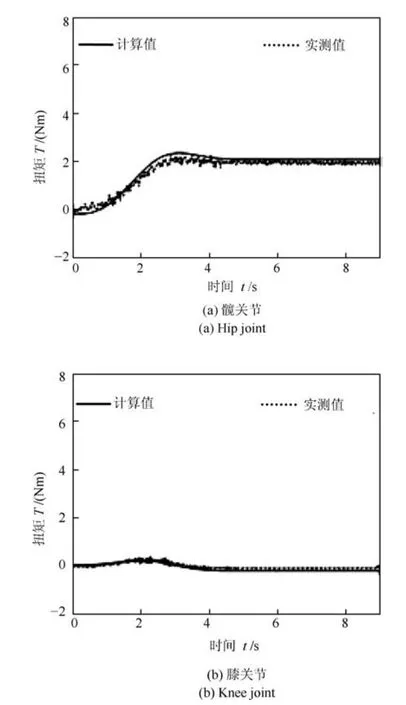
图11 重力矩计算值和实测值Fig.11 Measured and calculated values for gravity torque
图13展示了当遗忘因子λ=0.8且同步阈值µ均为1.0时的人–机髋关节1处于摆动步态期的交互情况.在此参数情况下机器人关节的位移输出和人–机相互作用力矩分别如子图13(a)和13(b)所示;机器人关节位移输出与人–机相互作用力矩的相位回归图∆ϕn+1=f(∆ϕn)如子图13(c)所示,从该子图可以看出,这时机器人与人的运动亦取得了同步,但机器人关节位移相对于人–机相互作用力矩的相位来说存在一定的相位差,大约滞后1.56rad.这说明人的运动较机器人运动超前,处于被拖动的状态,康复机器人与人交互较消极.
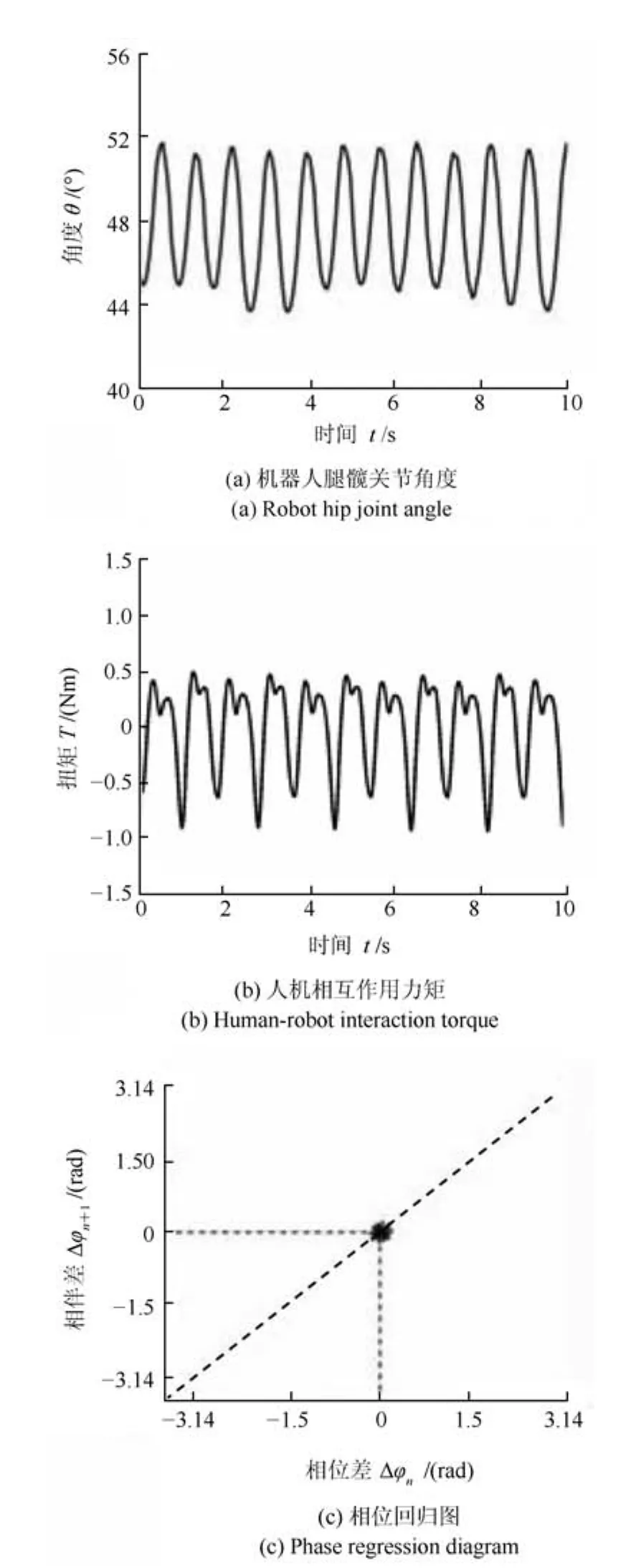
图12 λ=0.2时人机交互结果Fig.12 Result of interaction withλ=0.2
另外,从图14可以看到,当λ值取0.1、0.2、0.3、0.5和0.8时,机器人腿髋关节1的驱动扭矩平均值分别为0.59Nm、1.23Nm、1.52Nm、2.48Nm和3.89Nm.从这些实验数据可知,机器人腿髋关节1的驱动扭矩随着λ值的增大而增大,亦即康复机器人主动训练过程中提供给人的训练辅助力在逐渐增大.
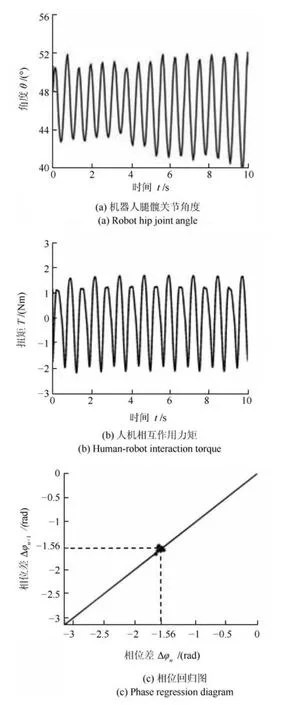
图13 λ=0.8时人机交互结果Fig.13 Result of interaction withλ=0.8
以上分析表明,当λ取值较小时,康复机器人与人运动在频率、相位上皆取得同步,关节辅助扭矩较小,柔顺交互性积极,人感觉较轻松,而当λ取值较大时,机器人仅在频率上与人运动取得同步,而相位滞后人的运动,关节关节辅助力矩较大,人有被拖动感觉,柔顺交互较消极.
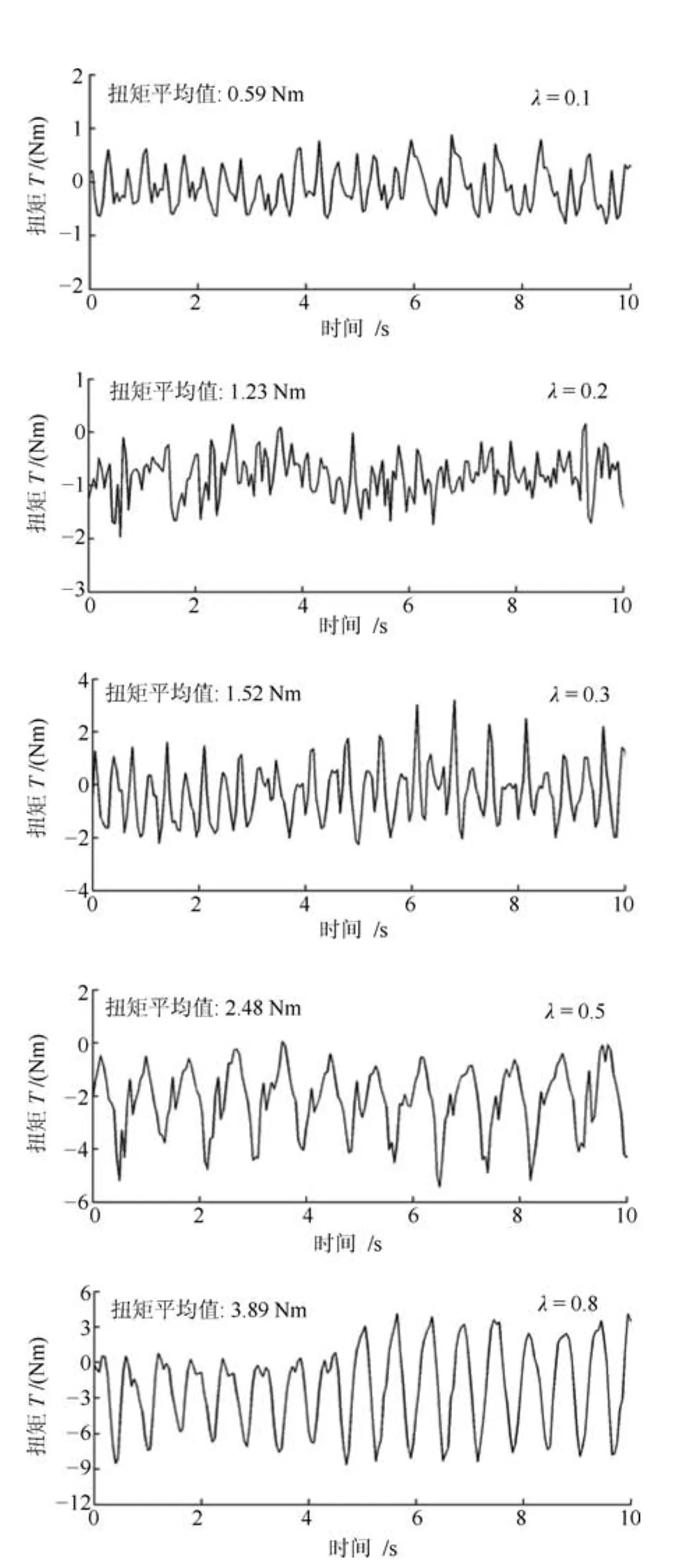
图14 λ变化时辅助扭矩结果Fig.14 Result of auxiliary torque with modifiedλvalue
3 结论
提出了一种矢量场逐次逼近的康复机器人柔顺交互控制方法,其矢量场逐次逼近系统具备自振动特性和输入输出同步特性,能通过识别力信号来获得患者的运动意图.同时,利用自行设计的新型下肢康复机器人作为实验研究平台,对该控制方法的有效性进了验证.实结果表明,在康复机器人主动训练过程中,所提出的控制方法能使机器人和人之间的运动在频率和相位上取得同步,并可通过调节矢量场逐次逼近系统的遗忘因子λ值的大小来调节机器人关节的辅助扭矩,改善训练的柔顺性.
另外,利用FFT频谱分析对机器人关节扭矩的组成成分进行了分析,并通过基于最小二乘法的参数辨识方法有效地实施了重力补偿,为康复机器人柔顺实时控制的实现开辟了另一有效途径.
