基于AMEsim的公铁两用牵引车液压系统的仿真与改进
2018-10-31刘默耘吴斌方李萍张杨严明霞熊新
刘默耘,吴斌方,李萍,张杨, 2,严明霞,熊新
基于AMEsim的公铁两用牵引车液压系统的仿真与改进
刘默耘1,吴斌方1,李萍1,张杨1, 2,严明霞1,熊新3
(1. 湖北工业大学 机械工程学院,湖北 武汉 430068; 2. 南京大学 计算机科学与技术系,江苏 南京 210023; 3. 湖北时瑞达重型工程机械有限公司,湖北 襄阳 441116)
基于我国对外贸易的增长和大陆桥多式联运的发展,传统的单功能公路、铁路牵引车已经难以满足铁路系统高效维护的需求。提出一种改进的公铁两用牵引车液压系统,在原有的研究基础上通过添加叠加式双向缓冲阀,进一步提升系统稳定性;引入行走轮可升降功能,使得牵引车能够适应各种路况。利用AMEsim对改进前后的液压系统进行仿真。研究结果表明:改进后的液压系统较原系统波动性更小,稳定性更高,运作执行时间更符合实际要求,且左右两轮在下降以及上升过程中在同一时刻位移差分别不超过1.1 mm和1.4 mm,同步性较强。故改进后的公铁两用牵引车液压系统应用范围更广,稳定性高,液压工作时间适宜,两侧轮同步性好,能更好地应用于实际工程。
公铁两用牵引车;液压系统;AMEsim;仿真
近年来我国铁路领域飞速发展,铁路系统面临的压力与日俱增。为提升系统维护效率,普遍采用牵引设备在铁轨上进行调车作业或车辆的运行牵引等工作[1]。公铁两用牵引车作为一种新型的牵引设备,因其特有的结构和使用方式,具有较高的应用价值[2−3]。公铁两用牵引车工作状态的转换主要由液压系统对用于铁轨行驶的导向轮进行升降来完成。目前,我国对于公铁两用牵引车液压系统的研究主要还停留在设计原理图后直接开发样机的传统阶段。张德进[4]完成了对液压系统的整体设计,但仅仅停留在原理的实现上。侯广慧[5]利用其设计的液压系统开发出了样机,但因前期未通过仿真软件进行仿真,设计周期长,容错率低,且该设备在公路上因底盘高度恒定而无法适应各种类型的道路。AMEsim作为一款多学科领域复杂系统建模仿真平台,能够很好地对机器设备的液压系统进行仿真模拟,有利于缩短设计周期,提升系统稳定性,得到了学者们的广泛关注。TAO[6]和WANG[7]均利用AMEsim对飞机的液压系统进行了设计优化。屈国庆等[8]利用AMEsim模拟研究了高速列车车内气压变化。段小龙等[9]利用AMEsim模拟仿真钢轨打磨车恒压加载系统,以此探索如何降低打磨力波动率。据此,本文利用AMEsim仿真软件对设计的公铁两用车液压系统进行仿真,在已有的研究基础上进一步改进液压系统,并提出行走轮升降的功能,使设备具有基本的功能外,还能有效适应于各种路况的行驶,稳定性和实用性更强。
1 公铁两用车液压原理
公铁两用牵引车的机械结构如图1所示[10]。公铁两用牵引车主要由车体、行走系统、驱动转向系统、控制系统、液压系统、遥控系统和电源等部分构成。其液压系统原理图[11]如图2所示。
液压系统执行公路和铁路2种行走模式的转换,主要承担导向轮升降和行走轮转向的工作,遥控系统和控制系统处理电信号,实现电磁阀的切换。在公路上行驶时,后导向轮左油缸2,后导向轮右油缸3,前导向轮左油缸4,前导向轮右油缸5都处于初始悬空状态,同时翻转油缸16可以通过所连的电磁阀状态的变换控制行走轮的转向。切换至铁路行驶模式时,行走轮先回到初始位置,然后液压缸2~5均推动导向轮下降,完成铁路牵引工作后,各导向轮再通过液压系统上升至初始位置。

图1 公铁两用牵引车机械结构图
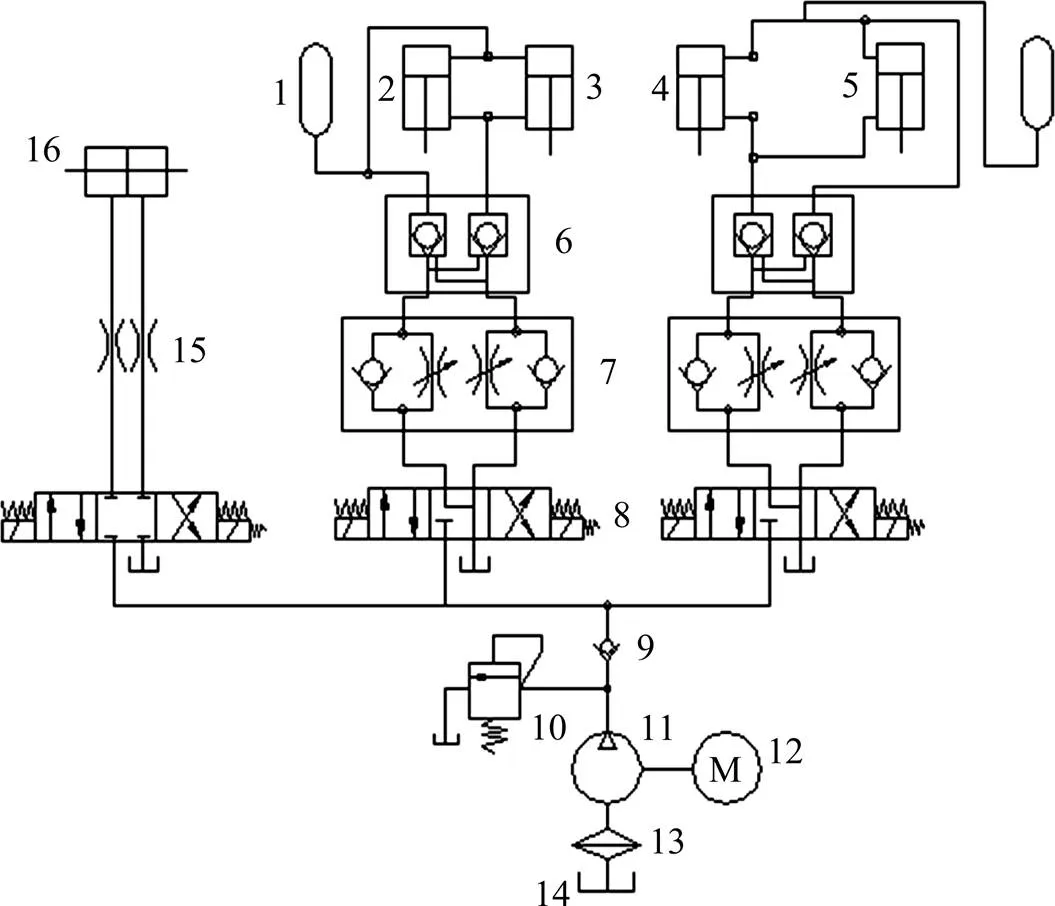
1—蓄能器;2—后左导向轮油缸;3—后右导向轮油缸; 4—前左导向轮油缸;5—前右导向轮油缸; 6—叠加式单向阀; 7—叠加式节流阀;8—电磁换向阀; 9—单向阀;10—溢流阀;11—齿轮油泵;12—电机; 13—滤油器;14—油缸;15—节流阀;16—翻转油缸
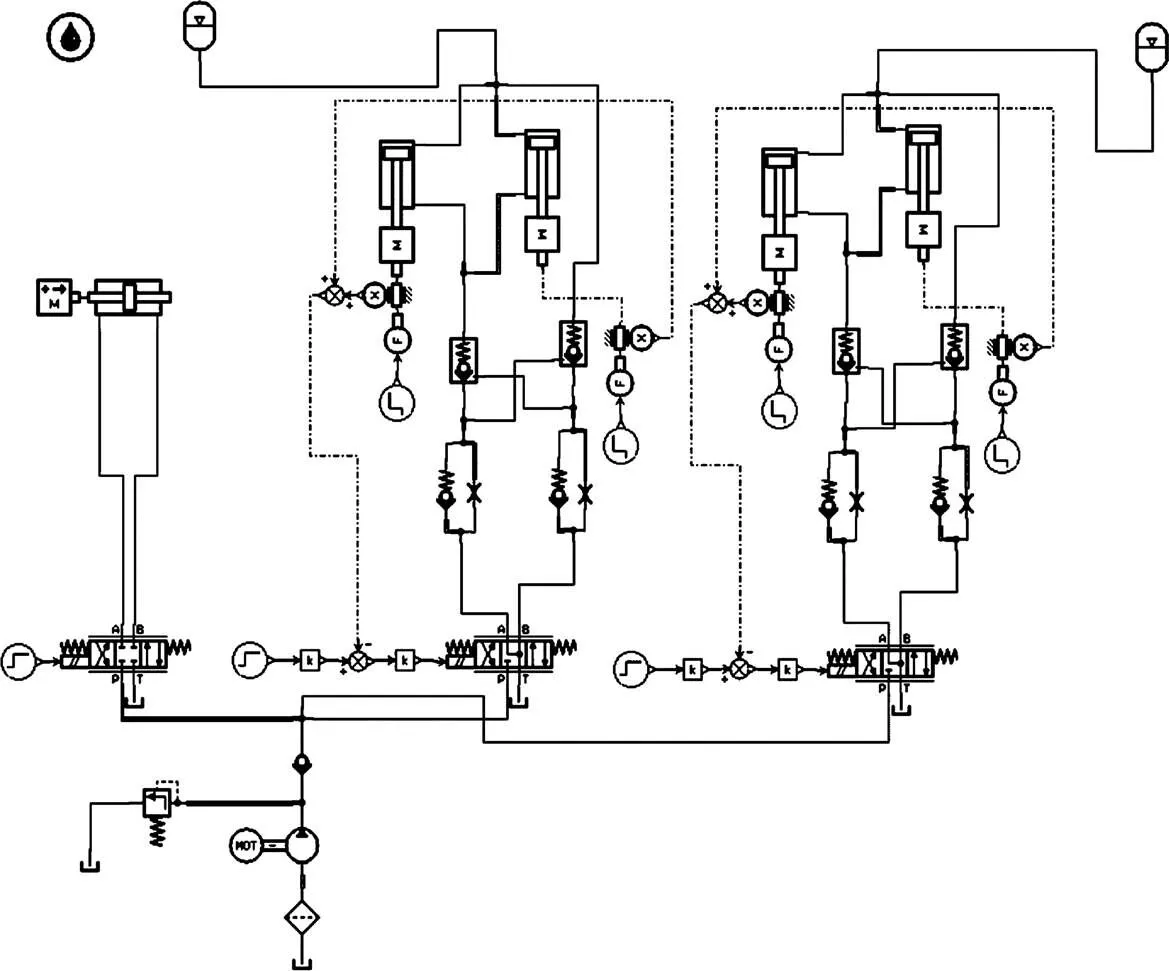
图3 AMEsim仿真模型图
2 液压系统仿真模型建立与分析
2.1 仿真模型与参数设定
根据图2所示的原理图,建立AMEsim仿真模型[12−13],如图3所示。液压系统的元器件参数设 定[14]如表1所示,主要包括信号源,泵体,电机,液压缸,三位四通阀和管道等元器件。其中,泵体,液压缸和三位四通阀均含有2个参数需要设置。
而UD00指行走轮与导向轮液压缸信号源,STEP0-3指翻转油缸信号源,这2个信号源根据实际需要人为输入,输入正值信号模拟拨动开关使导向轮下降,输入负值信号模拟拨动开关使导向轮上升,对于翻转油箱特别有输入0信号使行走轮回归到原位[15]。
表1 液压系统主要参数设置
Table 1 Main parameter setting of hydraulic system

元件子模型参数设置 单向阀CV000-1流量压力梯度5 L/min/bar 泵体PU001-1流量10 mL/r 转速1 500 r/min 电机PM000-1转速1 500 r/min 液压缸HJ000-1活塞直径40 mm 活塞杆直径20 mm
2.2 仿真分析
根据表1的参数设置和液压缸的行程,将仿真时间设置为15 s,同时考虑到导向轮升降的速率,将时间间隔设置为0.1 s,启动一次仿真。其中,三位四通阀输入阶跃信号,模拟控制系统瞬时改变导向轮升降的实际情况,仿真下降过程时设置阶跃信号为1,仿真上升过程时设置阶跃信号为-1。得到导向轮下降和上升过程中位移随时间的图像,如图4和图5所示。
由图4可以看到,虽然左右2缸同步性较好,但是在下降过程中,曲线在3 s时产生震荡,说明系统稳定性不佳,还有待提高。另外,由图5可以看出,导向轮上升过程仅用约5 s,速度较快。但是,实际牵引工作中并不需要快速地执行动作,并且执行速度越快对装置的零部件损耗也会越大[16]。

图4 下降时左右导向轮位移
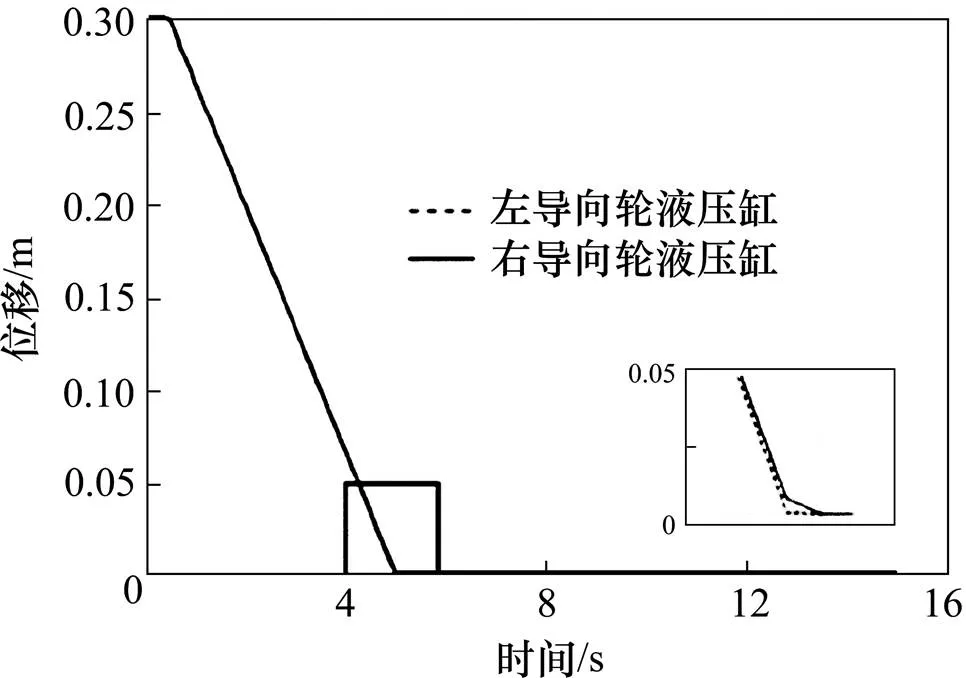
图5 上升时左右导向轮位移
因此,该模型的仿真结果虽能达到实际工作要求,但稳定性等方面仍有待提高。此外,该原理图下的行走轮高度固定,在公路工作状态下无法应对各种路况,当底盘相对路面较低时,则可能因外力损坏设备,所以使用场合上具有一定的局限性。
3 液压方案的改进及结果分析
3.1 液压方案的改进
针对原模型出现的问题,本文提出了改进方案,图6为改进后的液压仿真模型图。对于行走轮高度不可调的缺陷,单独为其增加了液压回路,使其与导向轮一样也能够进行升降运动。此时,牵引车在公路行驶状态下也能够通过升降行走轮来应对各种高度的路面,进一步拓宽了牵引车的应用场合。
此外,改进方案在各轮液压缸部分增加了叠加式双向缓冲阀,以降低机构瞬时运动产生的冲击,有助于提高牵引车的稳定性。
3.2 状态稳定性与工作时间改进分析
3.2.1 导向轮升降状态分析
通过AMEsim软件对改进后的模型图进行液压仿真,根据表1所示,人为设定各元器件的相应参数。其中,三位四通阀输入阶跃信号,模拟控制系统瞬时改变导向轮升降的实际情况,仿真下降过程时设置阶跃信号为1,仿真上升过程时设置阶跃信号为−1。

图6 改进后仿真模型图
此外,结合2.2节所述,设置仿真时间为15 s,间隔为0.1 s,启动一次仿真功能,得到左右导向轮下降和上升过程中位移随时间变化的图像。
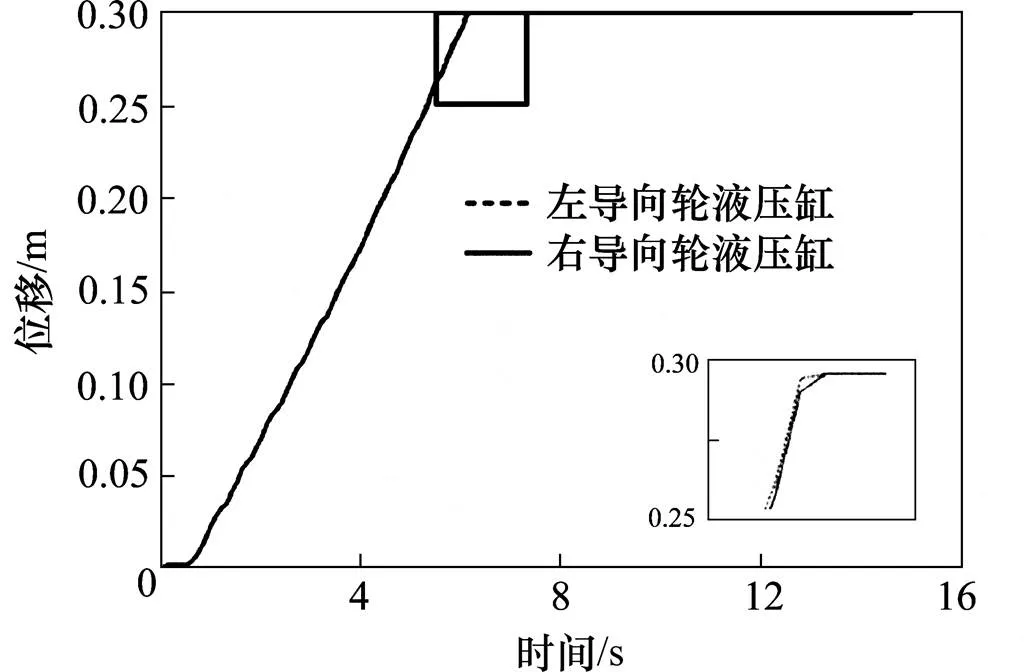
图7 改进后下降时左右导向轮位移
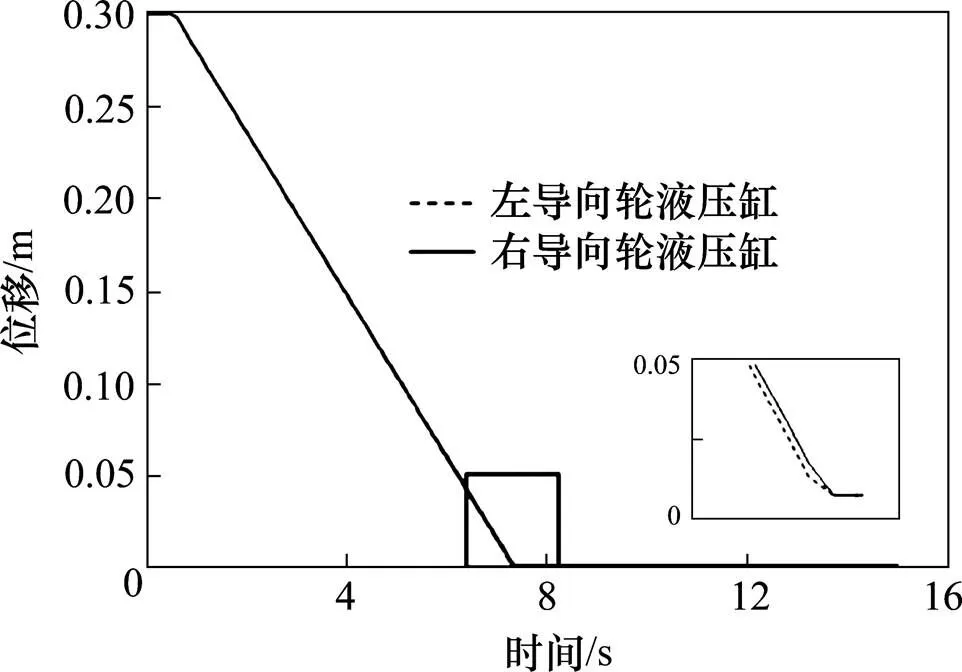
图8 改进后上升时左右导向轮位移
由图4和图7可以看出,曲线震荡明显减少,系统稳定性得到了显著性增强,而其良好的同步性也得到了保持。如图8所示,上升过程的动作执行时间增加到了7.2 s左右。此时设备运转更加平稳,也提高了零部件的使用寿命。
3.2.2 行走轮升降状态分析
通过AMEsim软件进行液压仿真,三位四通阀输入阶跃信号,模拟控制系统瞬时改变行走轮升降的实际情况,仿真下降过程时设置阶跃信号为1,仿真上升过程时设置阶跃信号为−1。设置仿真时间为15 s,间隔为0.1 s,启动一次仿真,得到行走轮下降和上升过程中位移随时间的图像,如图9和图10所示。
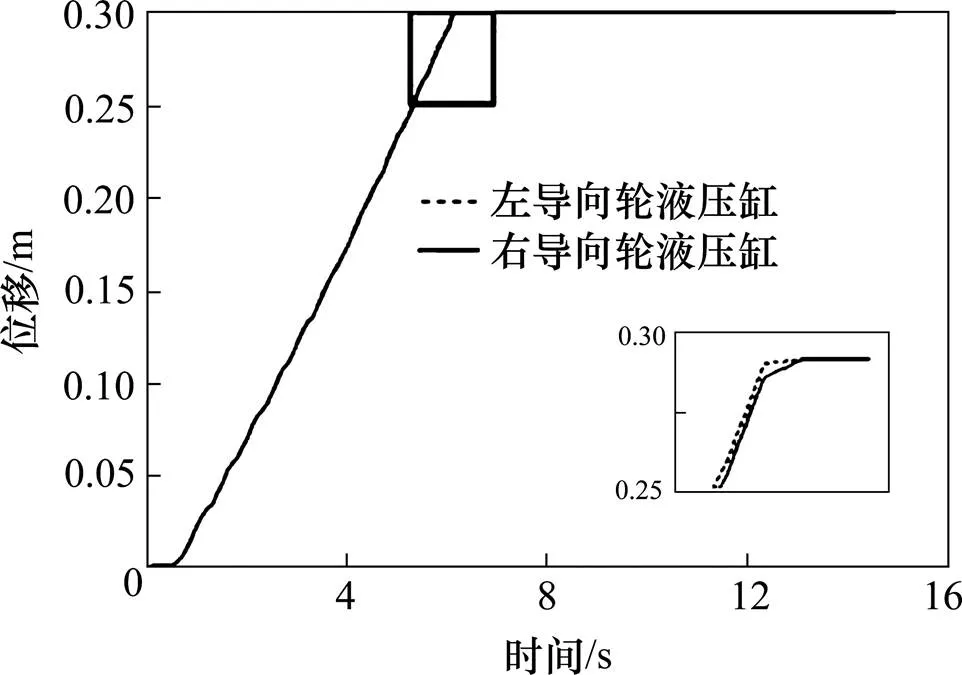
图9 改进后下降过程中左右行走轮位移
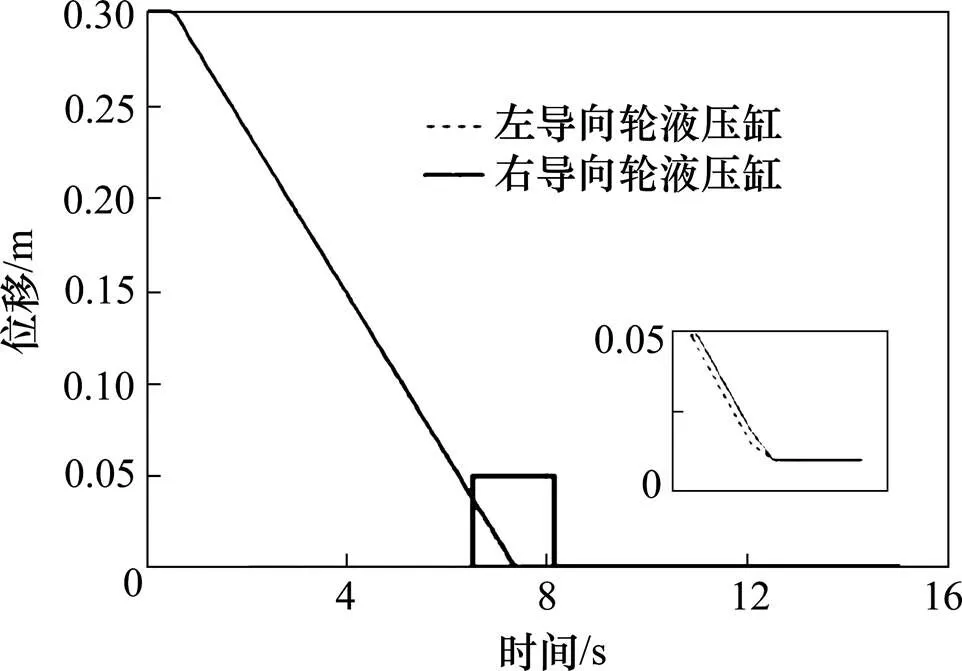
图10 改进后上升过程中左右行走轮位移
从AMEsim导出的仿真图可以看出,本文所增加的行走轮升降系统,在输入不同信号使其处于上升以及下降工作状态时,行走轮都能稳定的完成工作行程,且左右两轮同步性高,具备一定的实用 基础[17]。
3.3 工作状态下导向轮左右缸位移差分析
通过AMEsim得出改进方案下升降2种状态时左右导向轮液压缸在同一时刻位移差随时间变化的曲线,如图11和图12。
从图11和图12可以看出,在同一时刻,导向轮下降过程中位移差最大值不超过1.1 mm,上升过程中位移差最大值不超过1.4 mm。因此,改进后液压系统左右轮液压缸具有较高的同步性,能满足实际工作需求。
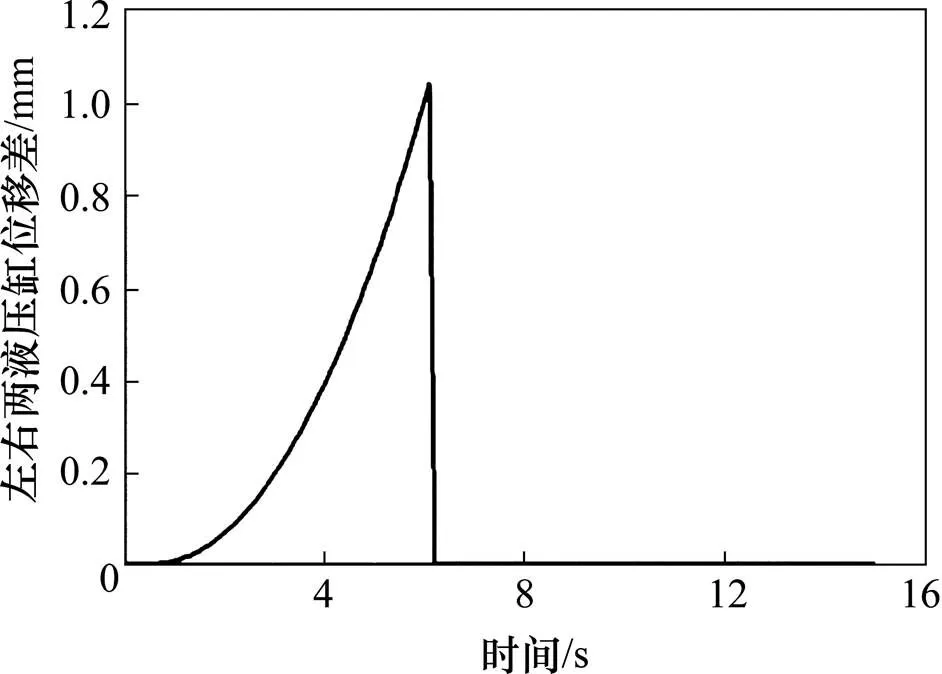
图11 改进后下降时左右位移差

图12 改进后上升时左右位移差
4 结论
1) 在公铁两用牵引车液压系统中添加叠加式双向缓冲阀,使导向轮下降时系统更加稳定,减少设备磨损。上升的时间由5 s延缓到7.2 s,有效解决了导向轮上升时速度略快的问题。
2) 为公铁两用牵引车的行走轮添加升降液压回路,在不影响原有液压系统的情况下,使其在公路行驶状态下将能根据路面情况自由调节行走轮高度,提高了牵引车的适应性和实用性。
3) AMEsim仿真位移差图像显示导向轮下降、上升过程左右两轮的最大位移差分别不超过1.1 mm和1.4 mm,设备系统同步性较高。后续研究将探索如何通过机械结构和液压回路简化液压系统,提高牵引车工作效率。
[1] 季晓丹. 公铁两用车的发展历程和趋势[J]. 铁道机车与动车, 2015(3): 1−5. JI Xiaodan.Development history and trend of rail-road vehicle[J].Diesel Locomotives, 2015(3): 1−5.
[2] 张茂松, 李芾, 杨阳. 公铁两用车的发展与运用前景[J]. 国外铁道车辆, 2017, 54(1): 1−6. ZHANG Maosong, LI Fu, YANG Yang. Development and application prospect of road-rail vehicles[J].Foreign Rolling Stock, 2017, 54(1): 1−6.
[3] 刘庆方, 夏萌梁. 基于装载机开发的公铁两用牵引车方案设计[J]. 煤矿机械, 2017(6): 23−24. LIU Qinfang, XIA Mengliang. Scheme design of railway and rail tractor based on loader development[J]. Coal Mine Machinery, 2017(6): 23−24.
[4] 张德进. 公路铁路两用牵引车液压系统的设计[J]. 起重运输机械, 2012(5): 59−60. ZHANG Dejin. The design of hydraulic system of road-railway tractor[J]. Lifting the Transport Machinery, 2012(5): 59−60.
[5] 侯广慧. GQ045型公铁两用牵引车液压传动及控制设计[J]. 液压与气动, 2014(4): 25−27. HOU Guanghui. Hydraulic transmission and control design for GQ045 road-railway tractor[J]. Chinese Hydraulics & Pneumatics, 2014(4): 25−27.
[6] TAO L. Design analysis and optimization for the civil aircraft hydraulic supply system based on AMESim[C]// IEEE International Conference on Aircraft Utility Systems, 2016: 890−894.
[7] WANG H, SHANG Y, JIA J H, et al. Simulation and analysis for users flow requirements of aircraft hydraulic system based on AMESim[C]// IEEE International Conference on Aircraft Utility Systems, 2016: 814−819.
[8] 屈国庆, 陈春俊, 闫中奎. 气压模拟系统大数据迭代学习控制算法研究[J]. 铁道科学与工程学报, 2016, 13(10): 1886−1890. QU Guoqin, CHEN Chunjun, YAN Zhongkui. Research of big data iterative learning control algorithm for air pressure simulation system[J].Journal of Railway Science and Engineering, 2016, 13(10): 1886−1890.
[9] 段小龙, 胡军科, 方健康, 等. 钢轨打磨车打磨力波动抑制方法研究[J]. 铁道科学与工程学报, 2014, 11(2): 125−130. DUAN Xiaolong, HU Junke, FANG Jiankang, et al.Research on grinding force fluctuation suppression methods of rail grinding train[J].Journal of Railway Science and Engineering, 2014, 11(2): 125−130.
[10] 赵大兴, 赵国栋, 许万, 等. 基于CANopen协议的公铁两用牵引车运动控制实现[J]. 制造业自动化, 2015, 37(23): 135−138. ZHAO Daxing, ZHAO Guodong, XU Wan, et al. Motion control implementation of electric road/rail tractor based on CANopen protocol[J]. Manufacturing Automation, 2015, 37(23): 135−138.
[11] 李立顺, 孟祥德, 李红勋. 一种新型公铁两用牵引车液压系统的设计[J]. 起重运输机械, 2015(8): 26−30. LI Lishun, MENG Xiangde, LI Hongxun. A new type design of hydraulic system for road-railway tractor[J]. Lifting the Transport Machinery, 2015(8): 26−30.
[12] 余佑官, 龚国芳, 胡国良. AMESim仿真技术及其在液压系统中的应用[J]. 液压气动与密封, 2005(3): 28−31. YU Youguan, GONG Guofang, HU Guoliang. Simulation technique of AMESim and its application in hydraulic system[J]. Hydraulics Pneumatics & Seals, 2005(3): 28−31.
[13] 张宪宇, 陈小虎, 何庆飞, 等. 基于AMESim液压元件设计库的液压系统建模与仿真研究[J]. 机床与液压, 2012, 40(13): 172−174. ZHANG Xianyu, CHEN Xiaohu, HE Qinfei, et al. Modeling and simulation research of hydraulic system based on hydraulic component design library of AMESim[J]. Machine Tool & Hydraulics, 2012, 40(13): 172−174.
[14] CAO W, LI D, CHEN Z, et al. Research on model and simulation of hydraulic lifting system of the wave power generating platform based on AMESim[C]// International Industrial Informatics and Computer Engineering Conference, 2015: 340−344.
[15] LIU Y, LIU L. Stability control and simulation analysis of automobile hydraulic system ESP[C]// International Conference on Advanced Materials and Computer Science, 2016: 1015−1020.
[16] ZHAO X X, ZHANG S S, KE W, et al. Research on operating parameters matching and efficiency optimization for hydraulic system based on AMESim[J]. Applied Mechanics & Materials, 2015(779): 192−198.
[17] MA J, WANG W, WU Q. Characteristic analysis of seal type hydraulic dumper based on AMESim[C]// International Symposium on Advances in Electrical, Electronics and Computer Engineering, 2016: 56−59.
(编辑 蒋学东)
Simulation and improvement of hydraulic system of road-railway tractor based on AMEsim
LIU Moyun1, WU Binfang1, LI Ping1, ZHANG Yang1, 2, YAN Mingxia1, XIONG Xin3
(1. School of Mechanical Engineering, Hubei University of Technology, Wuhan 430068, China; 2. Department of Computer Science, Nanjing University, Nanjing 210023, China; 3. Hubei Srida Heavy-duty Engineering Machinery Co., Ltd, Xiangyang 441116, China)
With the growth of China’s foreign trade and the development of continental bridge multimodal transport, the traditional single-function highway, railway tractor has been gradually no longer meet the demand of high efficiency maintenance of railway system. In this paper, an improved hydraulic system of the road-railway tractor is proposed. On the basis of the previous research, the system stability is further improved by adding a superimposed bidirectional buffer valve, and this paper put forward the function that walking wheel can be lifted, which makes the tractor can adapt to all roads. Simulation software AMEsim is used to simulate the improved and former hydraulic system, and the experimental results show that the improved hydraulic system is less dynamic and more stable than the original system, and the operation time is more in line with the actual requirements. The displacement difference between the left and right wheel is less than 1.1 mm and 1.4 mm at the same time. Therefore, the improved road-railway tractor hydraulic system has a wider range of applications, with high stability and suitable hydraulic working time, both sides of the wheel synchronization are good as well, making the tractor be better applied to the actual project.
road-railway tractor; hydraulic system; AMEsim; simulation
10.19713/j.cnki.43−1423/u.2018.10.029
TH137
A
1672 − 7029(2018)10 − 2670 − 07
2017−08−31
湖北省科技支撑计划资助项目(2014BAA06);大学生创新创业训练资助项目(201710500038)
吴斌方(1961−),男,湖北武汉人,副教授,从事机电产品研发的研究;E−mail:wubinfang521@163.com
