高支模坍塌安全监测模型研究
2018-10-30宋世军芦继忠苏以琨
宋世军,芦继忠,牛 山,苏以琨
(1.山东建筑大学 机电工程学院,济南 250101; 2.广西建工集团第五建筑工程有限责任公司,广西 柳州 545000;3.南宁市思索科贸有限公司,南宁 530000)
根据相关规范及文献,高大模板支撑体系(以下简称高支模)是指其搭设高度超过8 m、支撑跨度超过18 m、施工总载荷大于15 kN/ m2、集中线载荷大于20 kN/ m的模板支撑系统[1-3].
随着中国城镇建设及经济的飞速发展,高层建筑、高铁、高架桥等在日益刷新城市和整个中国的面貌,在这些高层建筑的建设过程中,需要搭设大量的高支模支架.从高支模的定义中我们不难发现,高支模具有高度高、跨度大、受力比较复杂等特性,在现场搭设高支模或进行混凝土浇筑过程中很容易发生坍塌事故.而一旦发生高支模坍塌事故,不仅延误了工程的进展,更为严重的是会造成重大的人员伤亡,给国家和社会带来巨大的经济损失.因此,研究一种高支模坍塌前的预警和报警方法,在当前的形势下显得尤为重要.
通过搜索相关文献,在高支模的安全监测方面有不少学者进行了不同方面的研究[4-7].王雪艳等[8]建立了基于AHP和模糊综合评判法的高支模体系风险评估模型,但该方法需要由评估专家根据上层次单因素对下层次因素做出权重评判,虽然提出了一种加权平均的方法,以减少评估专家个人因素对判断的影响,但在实际的操作过程中,仍然需要根据专家人员的变化来适时地进行调整,操作性复杂.潘业峰等[9]研究了大跨度超高模板支撑系统的应力检测,提出了一种检测高支模体系中立杆和横杆应力的方法,实现高支模的安全监测,但该方法布点非常麻烦.此外由于高支模体系中所用材料的不同,因此,根据应力数据判断高支模是否安全没有统一的判断标准.
基于以上现状,通过对高支模工程事故的统计分析,以立杆侧向位移监测为主要信息,基于支撑体系的稳定性计算,本文构造了高支模工程远程坍塌监测算法.通过实验验证,达到了预期效果.对高大模板支撑体系安全管理技术进行探索,对提高高支模安全施工技术水平具有重要意义.
1 高支模坍塌特征提取
高支模支撑体系受载过程中存在姿态变换,当达到坍塌临界点时存在整体失稳现象,所以在坍塌临界点之前力学模型是变化的.对坍塌临界点之前阶段的详细分析存在很多困难.
和其他建筑结构一样,高大模板支撑体系的极限状态分为承载能力极限状态和正常使用极限状态两大类.前者对应结构、构件达到最大承载能力、出现不适于继续承载的变形,包括倾覆、强度破坏、疲劳破坏、丧失稳定、结构变为机动体系或出现过度的塑性变形.后者对应于结构、构件达到正常使用或耐久性能的某项规定限值,包括出现影响正常使用、外观的变形、振动和局部破坏等.
强度破坏是指构件的某一截面或连接件因应力超过材料强度而导致的破坏.有孔洞的钢构件在削弱截面拉断,属于一般的强度破坏.高大模板支撑体系还有一种特殊情况,即在特定条件下出现低应力状态的脆性断裂,材质低劣、构造不合理和低温等因素都会促成这种断裂.钢构件因材料强度高而截面小,且组成构件又较薄,使失稳成为承载能力极限状态的重要方面.压应力是使构件失稳的原因,失稳在高大模板支撑体系中具有普遍性.
对于某一高支模支撑体系,均匀布置m个监测点,对任意一个监测点及其相邻的最多8个监测点,设计一个坍塌特征模型.
对于监测点的立杆,其侧向位移计算可以简化成如图1所示的轴心受压的杆,不考虑其伸出端变形,则其挠曲线微分方程为
(1)
式中:M为截面弯矩;EI为杆的抗弯刚度.
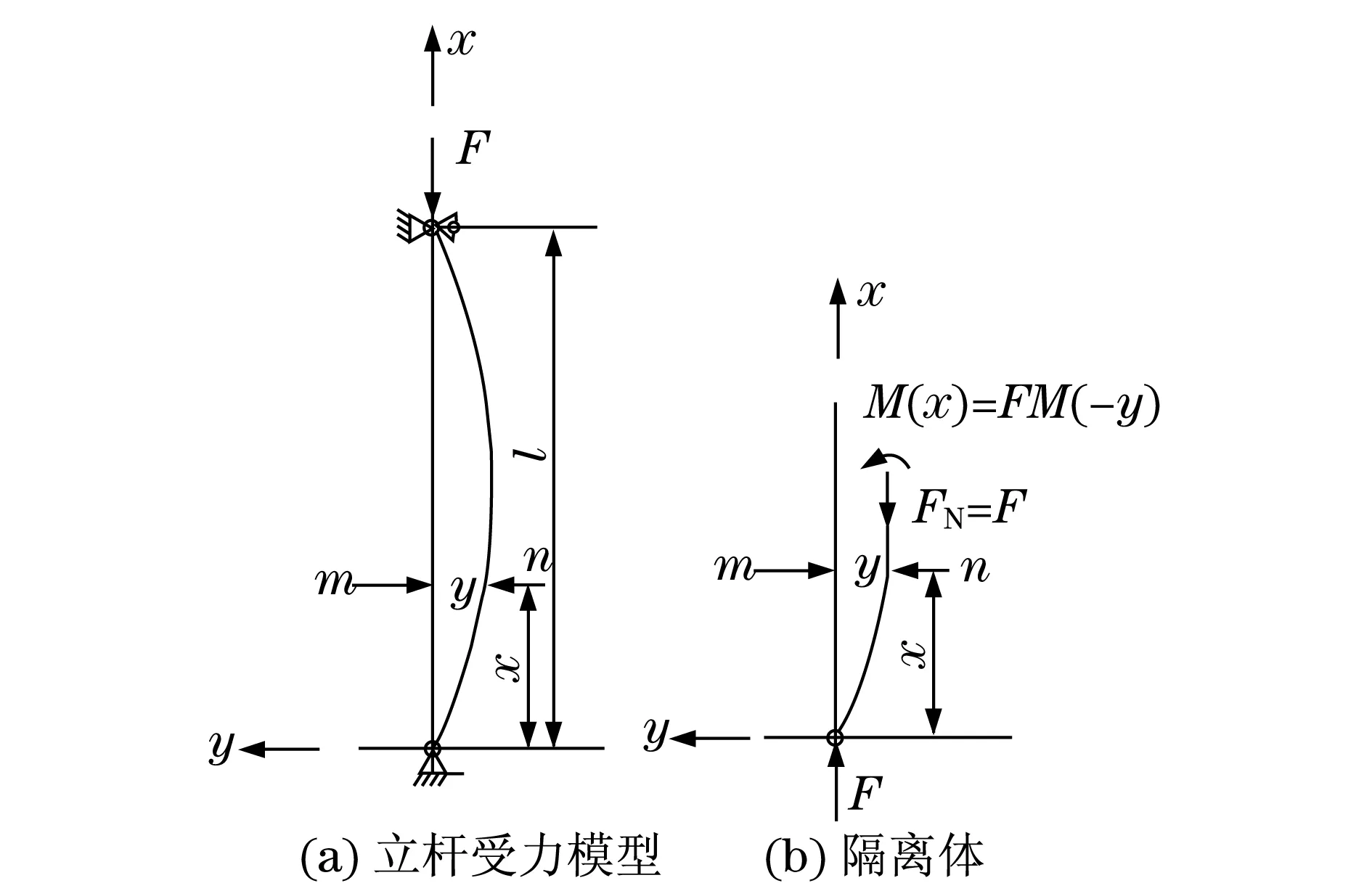
图1 模型Fig.1 Model
y向的最大挠度与轴向力F之间的理论关系如图2所示.在临界力处会出现一个奇异点.
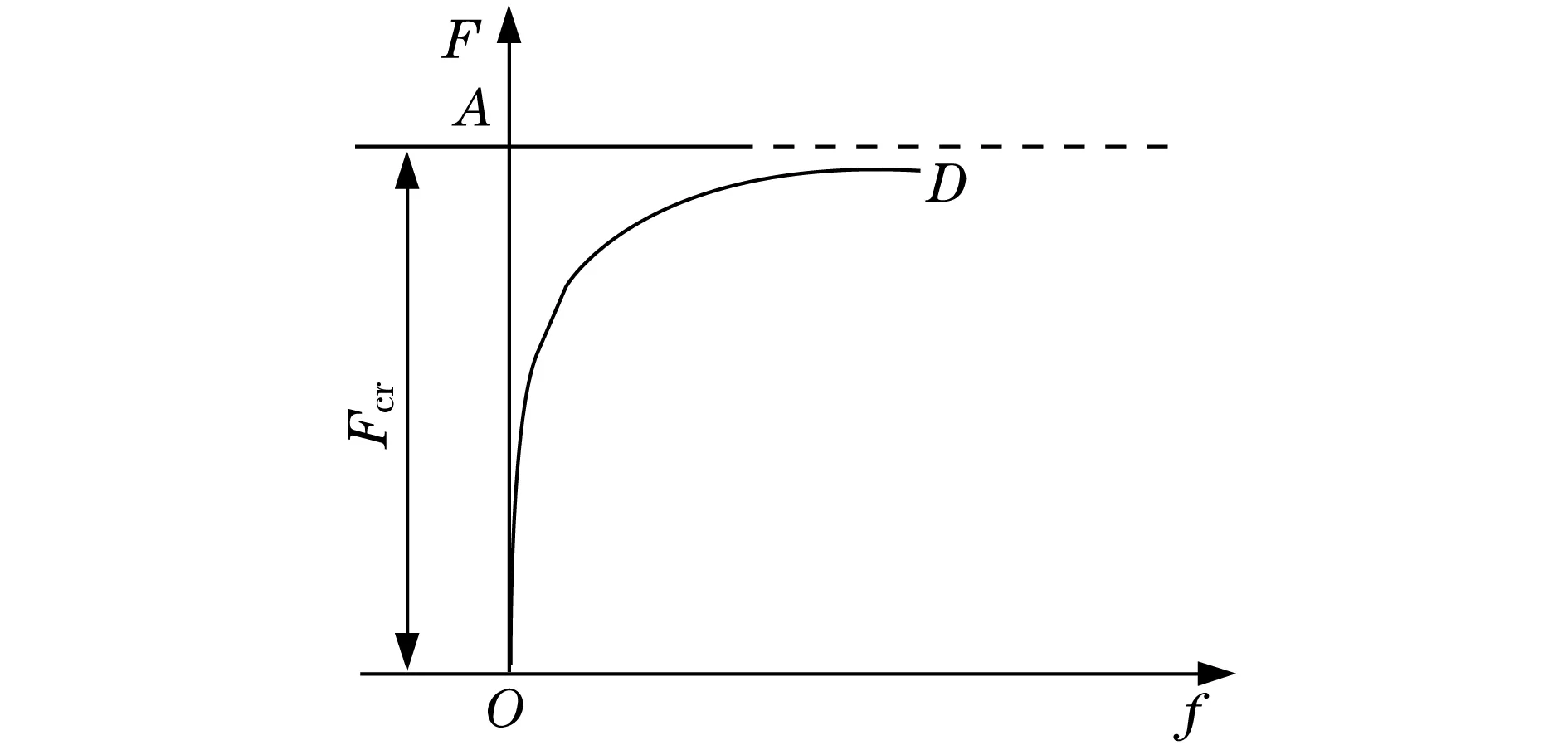
图2 最大挠度f与轴向压力之间的关系[10]Fig.2 The relationship between maximum deflection f
(2)
(3)
式中:F为立杆承受的压力;e为偏心距;l为高支模步距.
临界力为
(4)
所有的坍塌都表现为变形,不失一般性,本文用一个向量组作为坍塌特征量,相关定义如下:
向量模参数确定,初始位置作为位移原点(x1,y1),当前位置作为位移点(x2,y2),连接位移原点与位移点的向量作为特征向量,其向量模作为特征参数之一.安全阈值的确定为1层横杆连接失效时由式(3)得出的挠度,安全人员撤离报警阈值设为3层横杆连接失效时由式(3)得出的挠度.e值根据施工技术和脚手架加工精度决定,其向量模为
(5)
式中:k1为距离调整系数;k2为与施工工艺、脚手架材料、活载荷等因素有关的安全系数;[M]为报警阈值(简称报警值).
向量模的精度按实际工程结构允许变形的1/3~1/5确定.向量组判断准则,每个监测点产生一个特征向量A,其周围的相邻监测点产生的特征向量为Bi={b1,b2,…,bn}.
向量组定义为
(6)
式中:
rma=ra-Ra<[r]
rmBi=rBi-RBi<[r]
R为立杆位移原点对应的监测时间单元内的信息分布离散半径;r为位移点对应的监测时间单元内的信息分布离散半径;rm对应信息分布离散半径变化量;[r]为安全阈值.
高支模坍塌报警特征定义为:对于任一监测点,当向量组中有1/2以上的特征向量方向相同,且其向量模大于等于报警值时,判定被监测的高支模支撑体系处于坍塌危险状态,需要采取保护措施.
2 高支模坍塌报警算法
对于某一需要进行坍塌安全监测的高大模板支撑系统,均匀布置m个监测点,每个监测点根据式(6)构造其向量组,形成了tf1,tf2,…,tfm.
坍塌报警算法步骤如下:
步骤1未浇筑混凝土时,记录一段时间内倾角传感器监测到的位移坐标,分析位移坐标图得出这些坐标点的最小外接圆,记录最小外接圆半径为R,分别求出这些坐标点的横坐标和纵坐标的平均值,记作O(x1,y1).
步骤2判断O(x1,y1)是否满足施工安全规范要求(0.3%).否,给出整改信息,返回步骤1;是,进行下一步.
步骤3浇筑混凝土时,记录一段时间内倾角传感器监测到的位移坐标,记录这些坐标点的最小外接圆半径为r,平均值为O(x2,y2).
步骤4按式(6)构造向量组,按式(5)求向量组的各个向量模,并编制各个向量的方位码.
步骤5遍历所有监测点,根据式(5)设定各个监测点的向量模报警标志.
步骤6对于任一向量组tfi,i=1,2,…,m.
步骤7当组内处于报警状态的监测点数目大于等于2且小于m/2时,发出预警信号.
步骤8当组内处于报警状态的监测点数目大于等于m/2的方位码一致,或者监测点向量模大于安全人员撤离报警阈值时,发出坍塌报警信号.
根据报警算法进行高支模坍塌安全监测.
3 实验验证
为验证高支模坍塌监测模型的有效性,设计了一个验证实验,实验模架的纵横步距如图3所示,一个纵向3×1 500 mm,横向1×1 600 mm,步距2 500 mm,高度8 m的钢管脚手架平台,施加12 t载荷,通过构造缺陷寻找坍塌监测特征.
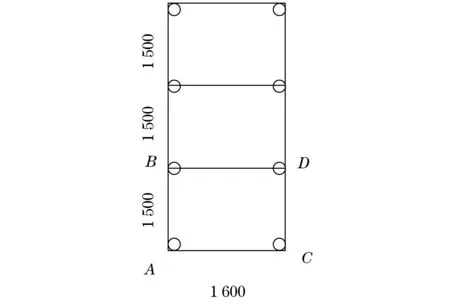
图3 钢管脚手架平台示意图Fig.3 Sketch map of steel pipe scaffold platform
4 有限元模型分析
对该实验对象建立有限元模型如图4所示,进行有限元分析,当载荷集中在某一点的过程中,相关监测点的位移如图5所示.
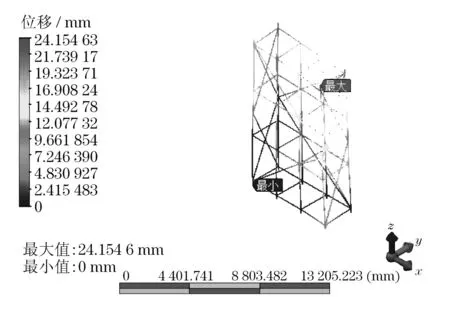
图4 建立的有限元模型Fig.4 Building the finite element model

图5 监测点的有限元分析结果Fig.5 The finite element analysis results of
可以看出,出现坍塌的立杆(A点)其向量模已经达到180 mm,最远处立杆(E点)此时向量模达到20 mm.
实验过程中,在每一个立杆上安装刚度仪测量侧向位移及倾角,施加载荷8.5 t,放置在平台上10 min,设备记录数据.从外观看,架体变形很大,架体发出变形时吱吱的响声,杆件变形很严重,而且随着时间的推移架体仍在继续变形,卸荷载后有较大的永久变形.经讨论,一致认为架体已失稳,处于坍塌状态.实测数据如图6所示.

图6 实测数据分析结果Fig.6 Analysis results of measured data
证明当出现某立杆失稳时,距离失稳立杆4.7 m的立杆位移达到毫米级,是可测的.
在坍塌临界状态时的数据如表1所示.
实验中,临界状态表中各点的数值均大于许用值,这表明本文的坍塌安全特征模型能有效识别坍塌临界状态.

表1 坍塌临界状态Tab.1 The critical state of collapsing
5 结语
本文基于立杆的失稳分析,统计了多个高支模坍塌事故特征,确定了以高支模立杆顶端位移特征为坍塌特征的监测方案.通过建立由多立杆侧向位移矢量及其轨迹分布距离构成的向量组高支模坍塌安全报警模型,设计相应的报警算法,实现了高支模坍塌预警实时监测.经实验验证该监测模型能标识高支模坍塌过程,在坍塌临界点具有明显的突变,对于监测高支模坍塌预警是可行有效的.对高大模板工程中模板支撑体系安全实时坍塌监控具有重要意义.
