基于无人机的大比例尺带状地形图快速建模技术研究
2018-10-20杜阳阳段晓峰陈锦生
杜阳阳,段晓峰,韩 峰,陈锦生
(1.兰州交通大学土木工程学院,兰州 730070;2.兰州交通大学测绘与地理信息学院,兰州 730070)
铁路灾害出现概率虽小,但一旦发生造成的社会影响极大,故而应充分做好各项铁路灾害应急预案。从线路工程角度,科学有效的预案制定首先取决于现场地形地貌资料的实时准确掌握,因而快速获取大比例尺带状图成为亟待解决的问题。
铁路应急测绘的具体任务是为铁路系统突发的自然灾害、事故灾难等突发公共事件高效有序地提供地图、基础地理信息数据、公共地理信息服务平台等测绘成果。传统的铁路应急勘测手段包括工程测量、遥感、物探、原位测试等。其中,遥感适用于大面域测绘,应急机动性不足;其他手段的作业条件危险,可达性低,信息传递不稳定。无人机航测技术具有成本低,数据处理快,影像分辨率高,现势性强等优点。在2016年丽水山体滑坡灾害中,通过开展应急预案设置、航摄作业及数据处理3个方面的技术研究,将无人机航测技术应用于应急测绘,并论证了其及时性、有效性和安全性。
本文基于无人机的数据特点,将无人机引入铁路灾害应急勘测,核心解决大比例尺带状地形数据获取及快速建模问题。
1 无人机大比例尺带状图施测方法研究
1.1 实验区概况
为保证实验数据客观有效,减少不必要的无人机视觉误差、仪器误差、环境误差、气候误差及精度损失,选取兰州市某新建公路作为研究对象,实验区平面如图1所示,该区域全长1 km,有效测量宽度38 m,海拔高度约为1 510 m,地势较为平坦,坡度变化小,地面遮蔽物少,利于无人机成像。

图1 实验区详图(单位:m)
1.2 无人机航摄系统构成
航测无人机的核心指标:续航时间、起降方式、飞行高度、飞行速度、抗风雨能力、遥测距离、载重能力、云台型号以及结构特点等。目前国内外测绘无人机主流机型及其参数如表1所示。
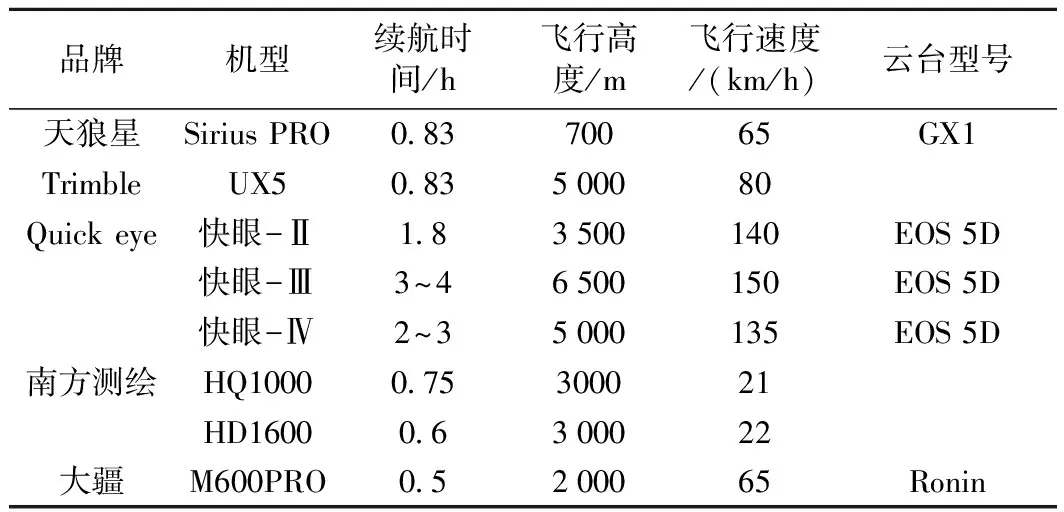
表1 目前测绘无人机的主流机型
本文所选取的是大疆MAVIC PRO型无人机,它体积小,易携带,起降方便,飞行平稳,遥测距离长,拥有一定的抗风雨能力,能够满足无人机应急测绘要求,具体参数见表2。
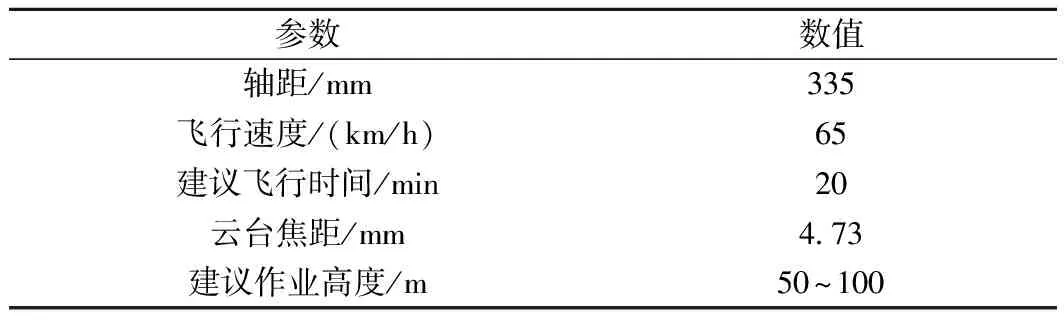
表2 大疆MAVIC无人机核心参数
1.3 施测方案设计
1.3.1 计算及设置航高
先根据正射影像图(B类)的成图比例确定影像地面分辨率(GSD),成图比例尺与影响地面分辨率的关系见表3。
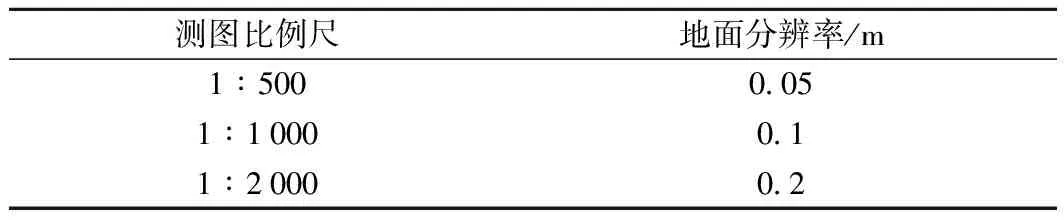
表3 测图比例尺与地面分辨率对照
根据以下公式计算航高
(1)
式中,H为航高;GSD为地面分辨率;α为像元大小。
本实验中航高设置为50 m,地面分辨率为0.045 m,满足1∶500数字正射影像图(B类)要求。
1.3.2 航带设置
为了航测成图的需要,考虑到航线网、区域网的构成及模型之间的连接,要求相邻的3张航摄片应有公共重叠部分。航摄中,要保持适当的航向重叠和旁向重叠。一般要求,航向重叠度为60%~65%,旁向重叠度为30%~35%。在地面站使用Atizure软件进行航带设计,本实验中航向重叠度为80%,旁向重叠度为60%,软件中航带设计如图2所示。

图2 航带设计
将规划好的航线导入飞行控制系统,地面控制子系统通过预设航向控制无人机飞行,正射摄影相机系统按照预设的航向和叠度进行拍摄。本实验共得像片262张,利用飞控数据和导航数据来检查航线的弯曲度、同一航线上的高度差等参数,经检查均满足无人机外业测量规范,具体航摄参数见表4。

表4 航摄参数
1.3.3 地面控制点的布设
布设控制点是为内业成图和解算精度提供一定数量的符合规范要求、精度较高的控制点。控制点和检测点均采用平高点,并通过采用不同方案确定控制点和检测点来实现成图精度的调整。根据带状地形图的特点,沿着带状地形图的两侧边缘加密布点,中心线处适当减少控制点的数目,边缘控制点的平均间距65 m,中心处的平均距离140 m。地面控制点采用1 m×1 m的棋盘格控制点靶标,共计37个,控制点的布设如图3所示。
1.3.4 基于CORS系统测量控制点
本次实验中运用的单基站CORS系统,是由一个连续运营的参考站及一个RTK组成。试验中参考站一直处于运行状态,通过登录服务器,使用GMS数据链,通过CDMA网络把标准实时差分数据发送给移动站,再由移动设备通过实时差分数据进行测量。
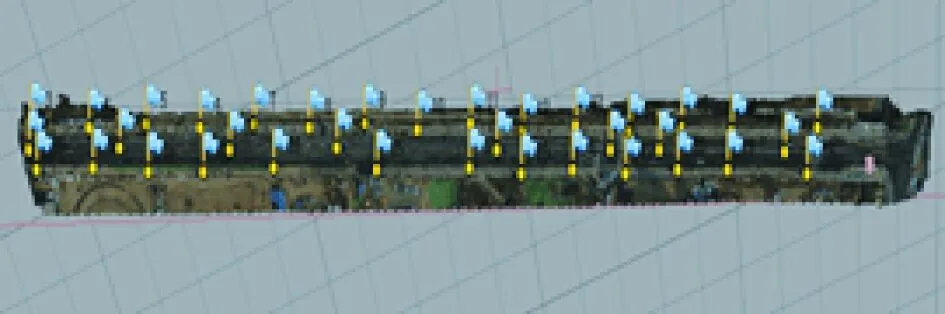
图3 控制点布设
本实验平高点的测量基于兰州交通大学已建的CORS参考站,采用南方GNSS银河Ⅰ型接收机(移动网络模式)测量。实现于WGS-84坐标系统下的经纬度、高程的获取,测量精度约为2 cm,并通过SOUTH卫星导航X3型手簿实现数据的记录与导出。图4和图5分别展示了棋盘式靶标以及外业测量控制点。
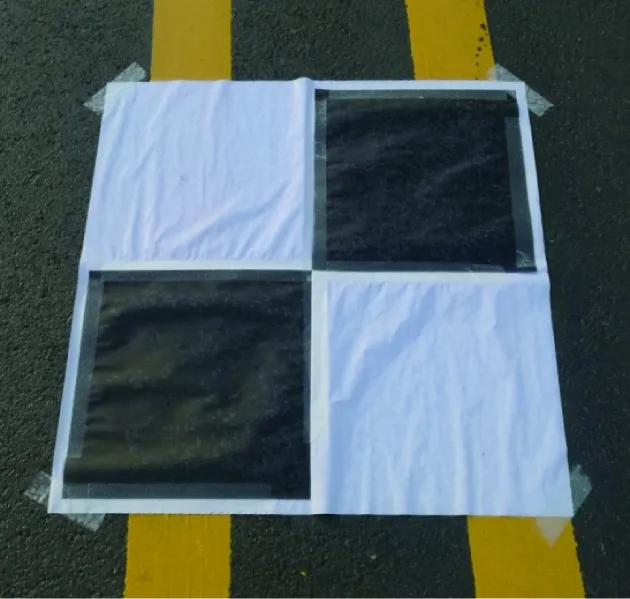
图4 棋盘式靶标

图5 GPS测量控制点坐标
2 大比例尺带状图快速建模方法研究
基于获取的251张航摄像片,使用Agisoft Photoscan软件进行大比例尺带状图快速建模方法研究,包括数据预处理和高精度DEM、DOM的生成。
2.1 无人机航摄数据预处理
内业数据预流程见图6。
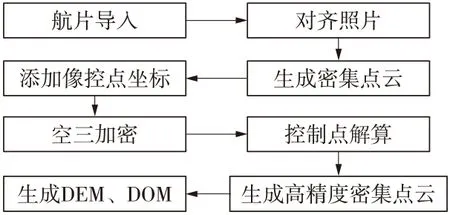
图6 内业数据预流程
2.1.1 航片导入
添加航片,软件自动识别并排列航片的空间位置(经纬度,高程,坐标系),如图7所示。
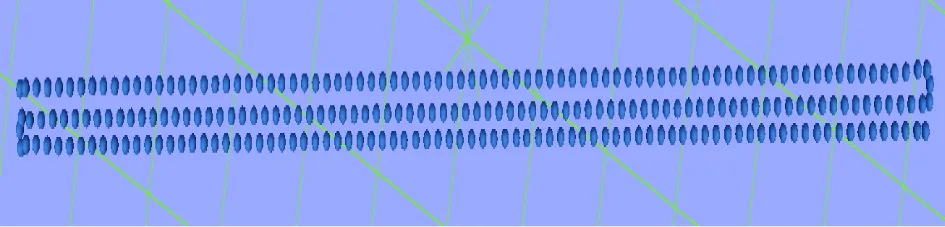
图7 航片导入
2.1.2 对齐照片
“对齐照片”后,软件会自动识别航片的相对位置和像片的偏转角,如图8所示。
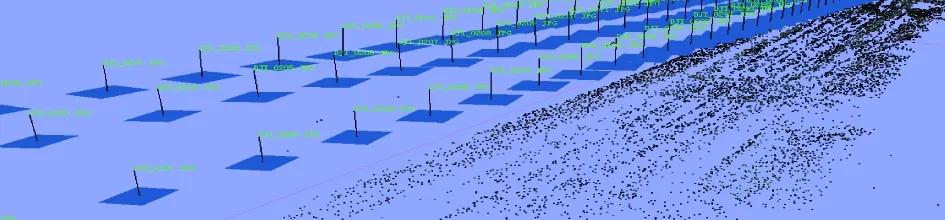
图8 像片对齐
2.1.3 建立密集点云
“建立密集点云”时需选择成图精度,精度越高点云密度越高,但预处理时相片共计251张,数据较大,因此选择中等精度,共得密集点云数28 407 664个。预处理后的密集点云如图9所示。

图9 实验区密集点云
2.2 高精度DEM、DOM的生成
2.2.1 添加像控点坐标
在密集点云中找到外业布设的控制点图形,并在该点创建标记点,后在该标记点所对应的像片中调整标记点与控制点重合。完成添加标记点后,需要赋予其绝对坐标值,密集点云的坐标系统应和控制点的坐标系统一致,均采用WGS-84坐标。图10和图11展示了控制点坐标的添加流程。

图10 点云中添加标记点24

图11 像片中点24
2.2.2高精度密集点云的生成;以及DEM、DOM的生成与导出
添加控制点坐标后,需对像片再次进行空三加密及控制点坐标的解算,生成新的密集点云,利用地面控制点的绝对坐标,实现对无人机相对坐标系统的绝对化转换,得到具有绝对坐标系统的密集点云。
利用Agisoft Photoscan软件生成DEM,再对航片进行拼接后,得到具有高精度的DOM。
2.3 内业数据具体化处理
通过上述方法处理后图形有区域留白,因此要进行像片加密。实验当天对该区域进行了两次航摄(条件基本相同),利用第二次航摄的航片对该区域进行补充,共计航片262张,生成的密集点云数29 504 553个。图12和图13分别展示了相同区域的内业通用化处理结果和具体化处理成果。

图12 通用处理结果

图13 具体化处理结果
3 建模结果分析
3.1 处理成果
经过航测内业数据处理,完成了对试验区实景三维模型(高程放大50倍)、正射影像、DEM以及等高线的生成,将结果导入ArcGIS软件中,成图效果如图14、图15所示。

图14 带状模型实景三维模型

图15 带状模型正射影像
3.2 精度评定
在测区内一共布置了37个控制点和检测点,全部是平高点。后期处理时,有一个控制点无法进行标定故而放弃。在进行成果输出时,本实验最初分别挑选了6个、11个控制点,但由于图形的畸变较大,无法满足规范的要求。具体见图16,在11个控制点时路面仍出现明显的偏转。

图16 11个控制点下的正射影像
增加至14个控制点时得到了基于《低空数字航空摄影测量内业规范》的1∶500的数字正射影像图(B类)及基于《基础地理信息数字成果1∶500、1∶1 000、1∶2 000数字高程模型规范》的1∶2 000数字高程模型。
控制点和检测点的空间布设如图17所示,其中红点为绝对控制点,黄色为检测点。

图17 控制点及检查点布设
3.2.1 数字正射影像图精度分析
基于试验区内的22个地面检测点的于WGS-84坐标系统下的实际测量值与同名点的图测值进行比较,计算同名点的平面位置误差,再通过中误差评定对DOM平面精确度进行判定。表5给出了检测点实测值与图测值的经纬度坐标以及误差,并制作精度分布图如图18所示。
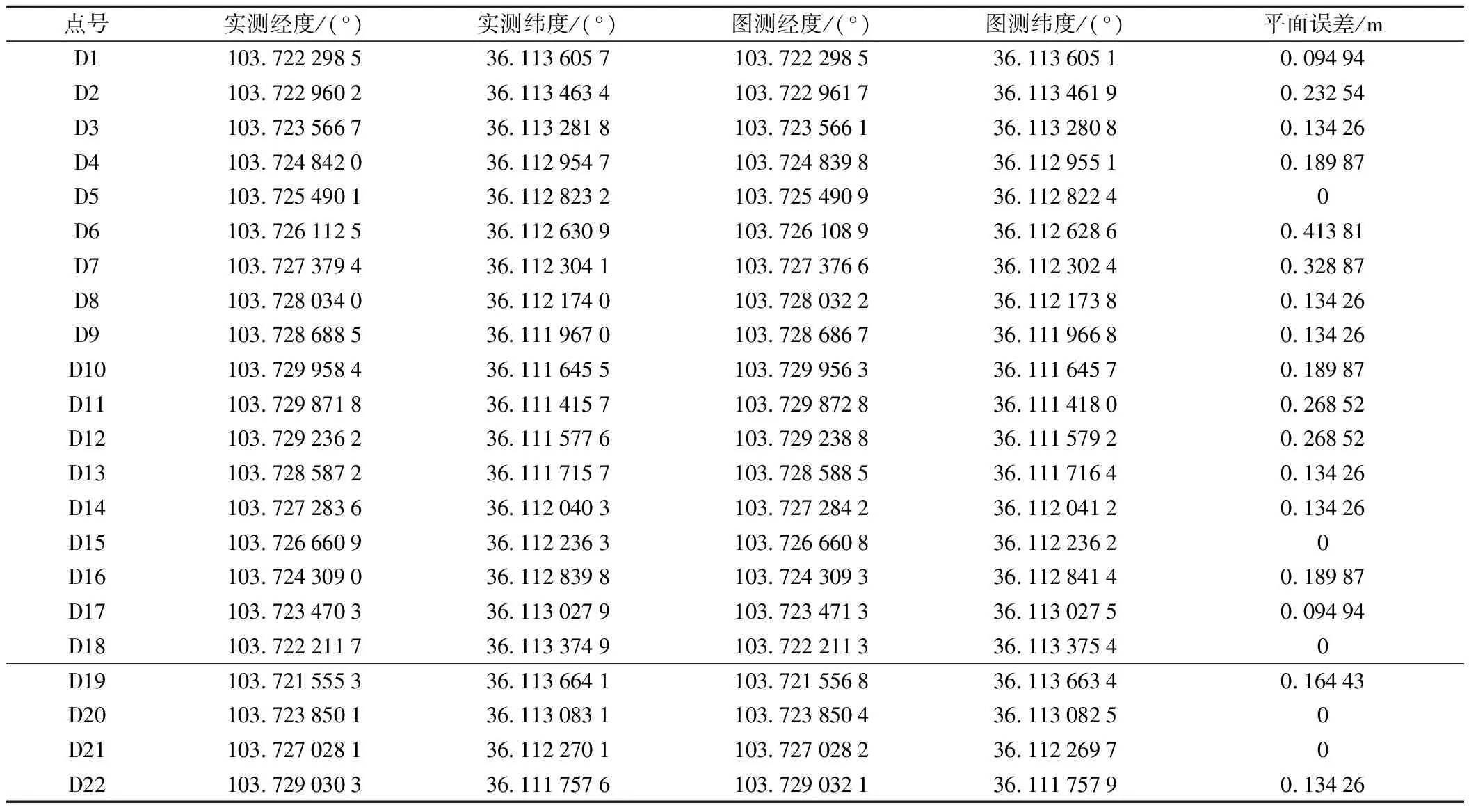
表5 DOM检查点精度评测
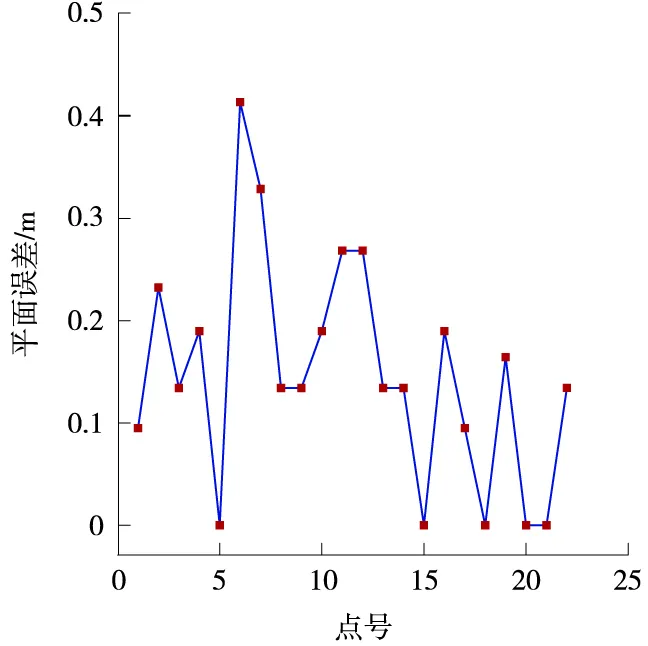
图18 实验区平面检查点精度分布
经过对比分析平面的精度分布,其误差范围普遍分布于0~0.2 m。其中误差较大的为点6、点7误差分别达到0.42 m和0.33 m,分析原因如下:在这两点处存在着遮蔽物对于内业控制点的选取存在干扰,造成测图点位置偏差,最终造成误差较大。
根据公式(2)计算平面位置中误差
(2)
计算结果MS=0.183 m<0.2 m,故可得到在平地条件下的1∶500正射影像图(B类)。
3.2.2 数字高程模型精度分析
基于实验区内的22个地面检测点的高程实际测量值与同名点的图测值进行比较,计算同名点的高程误差,通过中误差对高程精确度进行评定。
表6给出了检测点实测值与图测值的高程值以及误差,并制作精度分布图如图19所示。
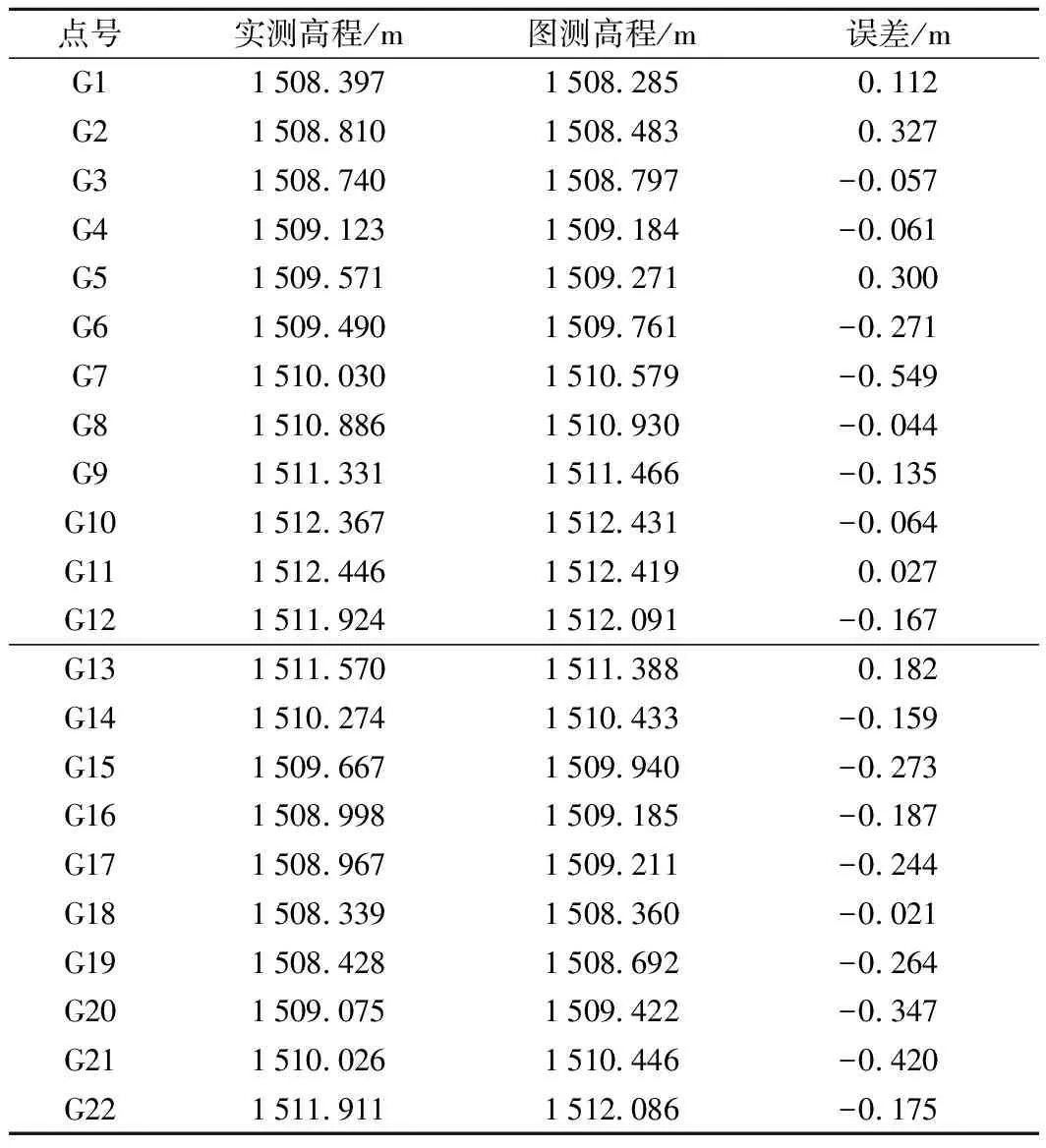
表6 DEM高程精度评测
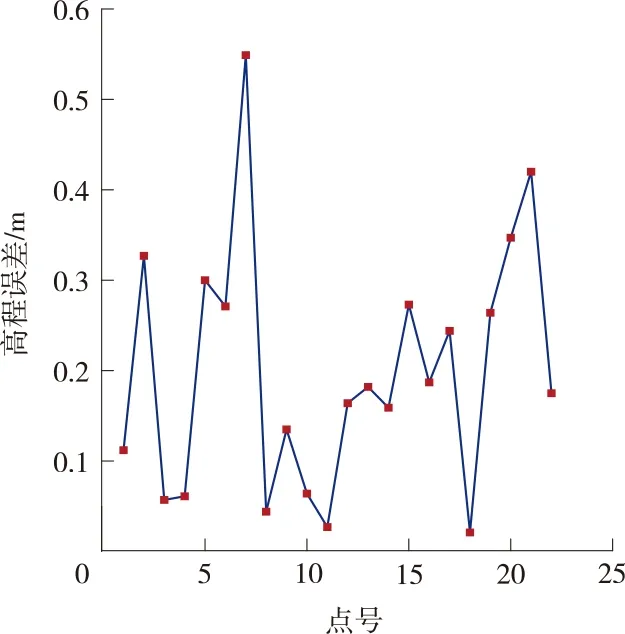
图19 实验区平面检查点精度分布
经过对比高程的精度分布,其误差范围普遍分布于0.1~0.3 m。其中误差较大的分别为点7、点21,误差达到0.549 m及0.402 m,现就点21进行说明,点21在无人机航测时处于阴影中,在进行图片校正时出现误差,导致成图精度低,故而高程影响较大。
根据公式(3)计算高程中误差
(3)
计算结果MS=0.24 m<0.4 m,满足在平地条件下,一级1∶2 000的数字高程模型。
4 结论
通过对“短、平、直”带状区域进行无人机航测实验,完成了大比例尺带状地形图的建模研究,论证了无人机在铁路与公路应急测绘中的可行性,取得的初步成果如下。
(1)外业中,在试验区采用边角加密布点法,并选择像控点的不同组合为地面控制点。
在14个控制点时得到了满足规范的DEM、DOM。外业使用CORS技术测量控制点,可更快速、高效地获取控制点的坐标。
(2)采用通用的内业处理流程对航片进行具体化处理,得到没有留白的密集点云。对内业生成的图测点与实测点进行处理,评估得到了符合标准的1∶500的DOM和1∶2 000的DEM,并对偏差较大的点进行了分析。
无人机能够在灾害环境中完成勘测任务,同时实现了利用无人机在短时间内得到大比例尺带状地形图,为应用无人机技术在铁路应急勘测提供了新方法。
