一种结合LED可见光通信技术的室内定位系统研究
2018-10-19洪启宸
洪启宸
一、引言
现在是高速信息化的时代,位置信息对人有很重要意义。在户外,用来定位的绝大部分应用是GPS,或利用无线基站进行定位,现在这些技术已经很成熟了。然而在室内这些技术却不再适用,因为室内这些方式都难以搜索到信号。然而对高精度室内定位的需求却越来越受到人们的重视,在商业活动、抢险救灾灯等都有此类需要。比如当我们在地下停车库中,我们需要快速明了地看到自己所处的位置,和出入口所在位置,从而以最短路径到达目的地,节约时间;当我们在大商场中购物,我们常常无法快速找到自己要购买的商品,但我们有了室内定位系统,我们就可以快速找到目标商品的位置,从而更便捷地购物;当发生煤矿坍塌等意外时,如果有室内定位系统,通过矿内发出的位置信号,我们可以快速准确的得到被困人员的位置信息,救援人员可以直接根据信息展开救援,极大程度缩短救援时间,提高被困者的生还率①。
目前来说GPS在室外可以满足人们的需要,然而在室内却不适用,我们室内定位需要精确、实时、方便,而现在我们有些技术可以应用于室内,甚至也有已经形成的产品,比如红外线定位,这种技术可以达到高精度,但是安装复杂成本很高,对于工况环境要求极高的隧道来说,红外线定位基本是不可能的②;超声定位也可以进行高精度定位,但依然免不了收发装置的重安装③;WiFi定位对办公室很普及,但由于信号不稳定,精度很低,一般只有米级同时还有较长的时间相应④。
我们不妨换一种新的思路,那就是利用随处可见的LED灯来进行定位,我们可以把光通信的技术引用到定位中,这样就避免了重新布置装置,既方便安装也节省成本。而可见光通信技术是一种成熟技术⑤,其先利用可见光通信技术传递信息,再利用图像处理计算几何坐标,从而实现高精度定位,可以实现精确实时方便的目标。基于可见光通信技术,原理是在普通LED灯上增加信息发送模块,对LED灯闪烁频率进行控制,将LED灯自身的坐标位置信息调制到光信号上,将编号信息编码为0、1的信号,向接收设备发送,而接收设备上有精密光电传感器,能把LED灯特定的闪烁频率转化为强弱电信号,解调出发射端传送的特定定位信息。在接受端上还有摄像头,可以拍摄LED灯的分布情况,通过几何算法计算出接收端相对于LED灯的相对位置信息,结合之前得
从而更便捷地购物;当发生煤矿坍塌等意外时,如果有室内定位系统,通过矿内发出的位置信号,我们可以快速准确的得到被困人员的位置信息,救援人员可以直接根据信息展开救援,极大程度缩短救援时间,提高被困者的生还率①。
目前来说GPS在室外可以满足人们的需要,然而在室内却不适用,我们室内定位需要精确、实时、方便,而现在我们有些技术可以应用于室内,甚至也有已经形成的产品,比如红外线定位,这种技术可以达到高精度,但是安装复杂成本很高,对于工况环境要求极高的隧道来说,红外线定位基本是不可能的②;超声定位也可以进行高精度定位,但依然免不了收发装置的重安装③;WiFi定位对办公室很普及,但由于信号不稳定,精度很低,一般只有米级同时还有较长的时间相应④。
我们不妨换一种新的思路,那就是利用随处可见的LED灯来进行定位,我们可以把光通信的技术引用到定位中,这样就避免了重新布置装置,既方便安装也节省成本。而可见光通信技术是一种成熟技术⑤,其先利用可见光通信技术传递信息,再利用图像处理计算几何坐标,从而实现高精度定位,可以实现精确实时方便的目标。基于可见光通信技术,原理是在普通LED灯上增加信息发送模块,对LED灯闪烁频率进行控制,将LED灯自身的坐标位置信息调制到光信号上,将编号信息编码为0、1的信号,向接收设备发送,而接收设备上有精密光电传感器,能把LED灯特定的闪烁频率转化为强弱电信号,解调出发射端传送的特定定位信息。在接受端上还有摄像头,可以拍摄LED灯的分布情况,通过几何算法计算出接收端相对于LED灯的相对位置信息,结合之前得到的每个LED灯的固有位置,计算出接受位置的精确位置信息。通过可见光定位,不仅继承了可见光通信的优点,而且对电磁波比较敏感的地方,如加油站矿井都可应用,所以本篇文章通过研究,提出了一种基于可见光通信技术的室内定位系统,并且经过一定的实验,证明是可行,且准确便捷的。摄像头通过拍摄LED灯的位置,电子罗盘调整获取摄像头倾斜角度,统一处理所得信息得到装置位置。
二、系统设计方案
可见光定位需要利用两方面的技术:可见光通信技术和摄像图像处理技术⑥。利用可见光通信技术,在设备上加装精密的光电传感器,调制屋顶的LED灯,通过“0”“1”信息调制等方式将LED灯的参考位置做信源编码,“0”用灯亮来表示,“1”用灯灭来表示,将LED灯编码后的参考位置信息通过亮灭亮灭来发出信息,闪烁的频率应在10的16次方以上,从而使人眼察觉不到LED灯的闪烁。设备上的光电传感器接收到LED灯的闪烁,并将光信号转换为电信号,接收端进行滤波的解调放大,获得LED灯的参考位置坐标信息,然后将电信号传输到中央处理器中。在设备上加装一个摄像头模块,通过摄像图像处理技术,识别摄像头拍摄的图像中LED灯的位置,计算摄像头相对于LED灯的位置,结合光电传感器接受到的LED灯参考位置,从而得到待测点位置信息。如图1:定位装置上的光电传感器接收LED灯发出的位置信息,

图2 系统算法流程图
为了防止摄像头倾斜拍摄屋顶,得到不准确的信息,可以利用电子罗盘获取角度信息,结合电子罗盘得到的角度信息、光电传感器得到的参考位置信息和摄像头得到的相对位置信息,计算出设备所在的绝对位置信息。根据原理,我们可以利用单摄像头模块获取LED灯相对于待测点的距离信息。该模块的基本原理为在光电二极管旁安装一个普通摄像头,摄像头可以实时捕捉LED灯的图像信息,并将采集到的图像信息传送至处理器中对图像进行分析处理,图像处理需要利用图像滤波,图像识别,图像分割等技术。如图2:一方面LED灯发出含有参考位置信息的光信号,并被光电出感器接收,转化为电信号传入中央处理器,另一方面摄像头拍摄LED灯的图像,并识别图像中LED灯的位置,再通过电子罗盘获取的摄像头倾斜角度,计算出LED灯相对位置,并将信息传入中央处理器,中央处理器通过所得信息比对得到装置的绝对位置信息。

图1 定位系统设计架构图
三、定位算法的数学建模
1.定位坐标计算LED登记录自身的位置信息来自于地理坐标系,二摄像头计算得到的相对于LED灯的位置信息参考的是自身坐标系,当我们对图像上LED中心坐标进行识别和提取坐标信息后,可以通过空间几何原理和坐标系转换获得待测点相对于LED灯的位置信息。我们假设,地理坐标系为(u, v, w),摄像头坐标系为(x, y, z)。而前面通过可见光通信模块,我们已经获得了LED灯的绝对位置坐标(uL, vL, wL)。我们可以设待测点的绝对位置坐标为(0, 0, 0),这也是摄像头中心的位置坐标(图3)。

图3 室内定位坐标图
同理,在摄像头坐标系(x, y, z)中,我们设LED的坐标为(uL, vL, wL)。通过采集到的图像信息,利用图像处理算法,我们可以提取出图像上LED灯的中心,得到LED像的坐标为(xl, yl, zl)。通过相似三角形的简单推导,我们可以得到如下关系式:

在公式中,是摄像头的焦距,公式整理如下:
当我们已知zL和 f,并通过识别图像可得到坐标(xl, yl, zl)。我们可以得到LED灯在坐标系(x, y, z)中的坐标(xL, yL, zL),并很容易求得,即为在二维平面上,LED灯相对于摄像头中心(即在坐标系(x, y, z)中的坐标为(0, 0, 0))的相对位置信息。反之,即为待测点相对于LED灯的相对位置信息,其中坐标(xL, yL, zL)仅为在摄像头坐标系下成立,而在所有坐标系中都成立。
2.利用电子罗盘校正绝对方位
根据原理,我们还需要获取参考位置LED灯相对于待测点的绝对方位信息,该信息是通过电子罗盘模块的引入完成的。从原理上来看,因为LED灯相对于待测点的相对位置坐标(xL, yL, zL)是在摄像头坐标系(x, y, z)下成立的,为了转换成地理坐标系(u, v, w),需要一个绝对方位信息,将相对位置坐标(xL, yL, zL)转换成地理坐标下。如图4所示。

图4 电子罗盘坐标图
其中,为x轴与方位北的夹角,即将坐标系(x, y, z)逆时针旋转θ角度,利用坐标旋转矩阵,可以得到如下的坐标转换公式⑦:

所以由已知的(xL, yL, zL)可以求得在地理坐标系(u, v, w)下的相对位置坐标。
3.利用倾角传感器进行倾角修正
前面设计的室内精确定位系统要求接收端需要水平与地面,尤其是摄像头,因为如果有过大的倾角,图像上的相对位置就会发生很大变化,会使得定位结果完全失真。但我们考虑实际应用中,如果定位终端为手持设备,则无法保证完全的水平于地面,可能会有些许的倾角。为了更好的适用于实际需求,完善用户体验,我们还可以引入倾角传感器,利用倾角传感器采集到倾角数据,对定位的结果进行修正,消除因为倾角造成的定位误差。
倾角修正的基本原理是:我们设俯仰角为α,侧倾角为β。我们可以视为将(x, y, z)坐标系先绕x轴逆时针旋转α角度,再绕y轴逆时针旋转β角度,将两者的旋转矩阵相乘可以得到倾角补偿矩阵Rg⑧:

将我们之前得到的(xL, yL, zL)坐标与Rg矩阵相乘,就可以得到修正后的坐标,之后的定位算法不变,则可以实现对定位的结果进行倾角补偿。

图5 在不同信噪比下沿确定运行轨迹的定位计算
以上内容从理论上阐述了本文设计的室内可见光定位系统的基本原理以及推导了具体的定位所需算法。利用可见光通信技术可以获取参考位置信息,即为参考位置LED灯的绝对位置(uL, vL, wL),接着是通过摄像头模块获取参考位置LED与待测点的距离信息和通过电子罗盘模块获取参考位置LED与待测点的相对方位信息。当有了二者的距离信息和相对方位信息,就可以获取参考位置相对于待测点的相对位置坐标。结合参考位置的绝对位置坐标和相对于参考位置的相对位置坐标,我们就可以很容易的实现待测点的绝对位置坐标,实现了完整的高精度精确室内定位功能。
最后,考虑到实际应用中的倾斜问题,摄像头的倾斜对定位结果有很大的影响,所以对定位结果做倾角补偿是必不可少的。本章也阐述了倾角补偿的基本原理,提出了修正矩阵,在定位算法中引入该修正矩阵就可以实现倾角补偿功能。
四、仿真与验证
信息。假设摄像头在空间中运动的曲线方程已知,也就是说我们通过几何关系可以知道运动曲线上每个点的绝对位置信息,在仿真中设定不同的信噪比,仿真不同信噪比情况下通过算法计算得到的测量点的位置信息与实际位置点之间的误差,其计算结果如图5所示。
从图5中可以看出,在地信噪比时,计算点与实际预设点位置之间的误差较大,测量点离散分布在螺旋线周围,而随着信噪比的升高,通过协同定位的方法可以较准确地计算出测量点的位置信息,与真实坐标相差不大,也就是在图中表示的测量点计算得到的坐标基本接近于螺旋线在空间中的真实轨迹。需要注意的是,真实实验中摄像头、电子罗盘和倾角传感器三者需要保证相对位置绝对不变,协同工作,才能保证定位结果的精确性和可靠性。假设有N个定位参考点,其位置矢量的坐标为根据参考点的位置,通过定位算法可以得到相应的N个计算点,其位置矢量的坐标为,计算点和参考点之间求欧氏距离,可以得到全空间定位时的最小均方误差(RMSE),其计算公式如下:

1.定位误差分析
在LED可见光协同定位的过程中,倾角传感器必须保证摄像头与电子罗盘处于同一平面上,并且在移动过程中,电子罗盘相对摄像头不能有倾斜或者偏移,否则,角度的倾斜或者偏移会大大影响定位结果的精确性。因此,在仿真实验中,我们首先假设倾角传感器和电子罗盘都有绝对的精度,定位过程中可以给摄像头坐标提供可靠的倾斜角和偏转角参考。
当已知通过摄像头获取到的参考LED与待测点的距离信息,并且知道通过电子罗盘获取到的参考LED与待测点的相对方位信息,之后通过倾角传感器进行补偿。在仿真中我们假设摄像头沿螺旋形上升,在上升过程中通过接收LED传来的自身方位信息,并且利用文中的定位和校正算法不断计算自身的位置
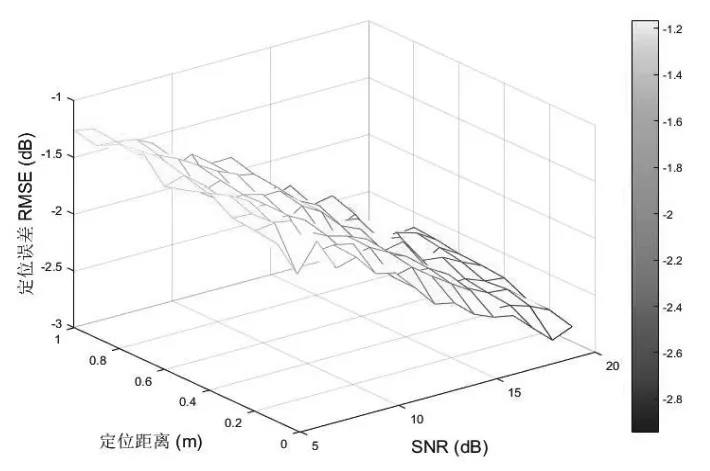
图6 定位误差仿真计算
从仿真实验中可以发现,在信噪比较好的情况下,定位算法的精度上可以满足室内定位的基本需求,误差在厘米级别。从结果我们可以看出,当距离LED灯中心距离小于1m时,其误差在1cm以内。但当距离大于1m时,误差会逐渐变大。综合整体的误差表现来看,在1m内的定位误差基本不超过1cm,完全符合室内的定位需求。
2.算法局限性改进方法
室内精确定位系统可能存在以下几个问题,针对具体问题本文也给出了相应的解决方案。
(1)摄像头图像问题
由于摄像头采集的图像问题,可能会导致LED中心提取不准,图像中LED灯由于镜头和灯光的问题,容易产生花生班和大光晕的现象。究其原因,一方面是灯光前的灯罩导致了光的衍射和折射现象导致的,另一方面也可能是LED光太强,导致摄像头对光过饱和导致的。
对于这个问题,可以采取在摄像头上加上减光片,减少灯光射入摄像头的亮度,也可以减弱因为衍射或反射进入摄像头的噪声光斑。从而大大改善了图像采集LED图像的质量,提高了定位结果的精确性和稳定性。
(2)多灯定位时的问题
考虑到实际应用的场景,将该系统还可以推广到多灯定位的情况,实现两灯之间的定位网络的完美衔接。我们考虑当该系统需要运用于部分实际场合,要求全方位全范围的精确定位,不能有定位盲区。这就要求该算法在多灯之间切换时能做到完美衔接。但目前本文中并没有考虑同时接收多个灯发来的信息,所以我们需要设计新的算法,使得不丢失中心LED坐标的情况下直至成功接收到新的LED坐标。设计的解决方案需要让摄像头的视角足够广,可以同时容纳至少两个灯的图像,再通过图像跟踪算法和自适应算法,跟踪识别先前旧的LED灯作为中心LED。直至接收到新的LED发来的坐标信息,再将中心LED灯坐标更新,同时摄像头默认新的LED灯为中心LED灯。这样就可以实现两个灯之间的完美衔接,做到无盲区的定位功能,这也是基于本文出发未来的研究方向。
五、结论
在本文当中,我们提出了利用LED阵列和图像传感器进行室内定位的算法。白LED被用作光发送端,并且至少有三个空间上相互隔开的不共线的LED灯发出已知的位置信息。处于待测位置的图像传感器接收并解调通过镜片的光信号。然后运用几何关系计算出未知的位置。本文还对算法中的数学关系式进行深入的探讨。还分析解释了一系列的仿真结果来理解和展示不同的系统参数对定位精度上的影响。仿真结果显示,通过使用这个算法,定位精度可以减小至几厘米范围以内。该技术还因为不需要进行角度测量从而使得设备更加简单。但目前该技术仍然处于起步阶段,许多技术细节并不成熟,所以并未得到很好的应用和推广。这也意味着室内可见光定位技术仍然具有很大的改进和发展空间。
引文
①李志鹏.室内协同定位技术的研究与应用[D].北京邮电大学,2017.
②李立新,李建法.开放空间长阵列红外线扫描定位系统的研究[J].工矿自动化,2009,35(06):71-74.
③肖金红,刘智,杨阳,刘丹.基于CDMA-TDOA的室内超声波定位系统[J].吉林大学学报(信息科学版),2012,30(02):213-217.
④黄华晋,秦建息.基于三角定位算法的WiFi室内定位系统设计[J].广西科学院学报,2016,32(01):59-61.
⑤陈特,刘璐,胡薇薇.可见光通信的研究[J].中兴通讯技术,2013,19(01):49-52.
⑥川端优,中野贵司,夏秋和弘,泷本贵博,山崎信夫,本田大辅,玉井幸夫.图像处理方法和图像处理装置[P].日本:CN107341771A,2017-11-10.
⑦葛海浪,佘勃,陶迁.基于MEMS传感器的高精度电子罗盘研究[J].机电工程,2016,33(03):276-279.
⑧张小平,赵文耀.一种运用倾角传感器的阵形修正算法[J].声学技术,2011,30(04):321-324.
