单自由度磁轴承系统的自适应滑模控制的研究
2018-10-19安徽理工大学电气与信息工程学院张玉全张林青戴海祥
安徽理工大学电气与信息工程学院 张玉全 张林青 唐 磊 戴海祥
1.引言
磁轴承有无摩擦、无磨损、无须润滑、无污染、低能耗等优点①。磁悬浮轴承系统是典型的非仿射(控制输入不以线性比例方式通过控制增益进入并影响系统的动态特性)不确定非线性系统,且易受到外界干扰的影响。滑模变结构控制是一种非线性控制,且具有不连续性。该控制方法可以强行迫使系统按照预定的“滑动模态”运动②。
自适应滑模变结构控制是自适应与滑模变结构控制的结合,是针对时变不确定系统控制问题的一种控制方法③。针对具有参数未知变化和不确定干扰系统的变结构控制,F.J.Lin等④设计了一种带有积分项的“滑动模面”,并采用了自适应滑模控制,实现了不确定系统的自适应变结构控制。
2.磁轴承系统数学模型构建
单自由度磁悬浮控制系统数学模型是轴向磁力轴承的基础,在特定条件下也是径向磁力轴承控制的基础。
转子所受的合力F为:

式中:
N:电磁线圈匝数;
δ0:平衡气隙,mm;
μ0:真空磁导率,H/m;
S:单磁极的磁面积,mm2;
I0:电磁线圈偏磁电流,A。
对式(3)进行泰勒级数展开,在平衡点(x=0,Ic=0)处的展开式,忽略展开式的高阶量,可简化为:

式(4)是转子在平衡点附近的力学方程,只是为了方便计算和理解进行了线性的简化。主要注意的是在实际的运行系统中,Kx、Ki并非一定是常数。
3.系统设计及仿真结果
由于磁轴承系统的系统参数和外加干扰的不确定性,故将单自由度磁轴承系统简化为:

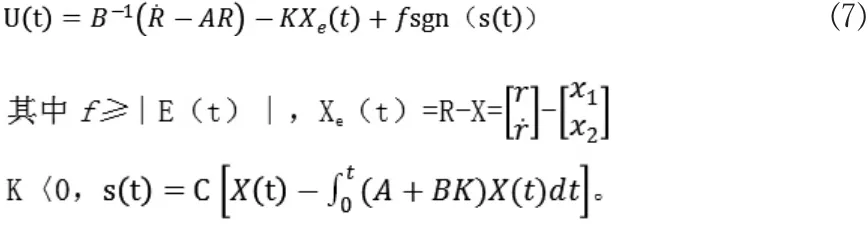
将积分型切换函数设计为:

式6中C为正常数构成的矩阵,K为状态反馈增益矩阵。当系统状态处在滑模面时,即:


图1 单自由度磁力轴承结构简图
此时,可达到理想的控制效果。
滑模控制器设计为:
当磁悬浮系统出现参数变化和外界扰动时,转子会偏离原来的平衡位置,为了能使磁轴承回到最初位置上或平衡位置,需要控制电磁铁所通过的电流,进而去控制转子受到的力,所以增加一个控制电流,此时作用在转子上的电磁力设为F1和F2。

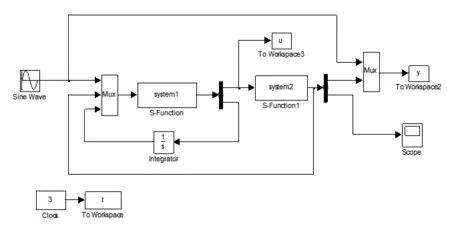
图2 Simulink主程序图
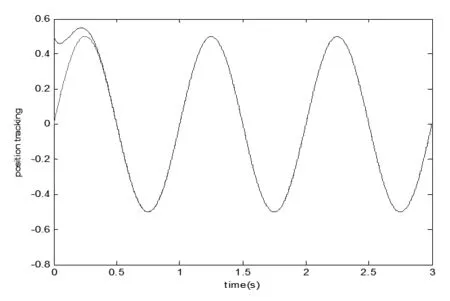
图3 位置跟踪
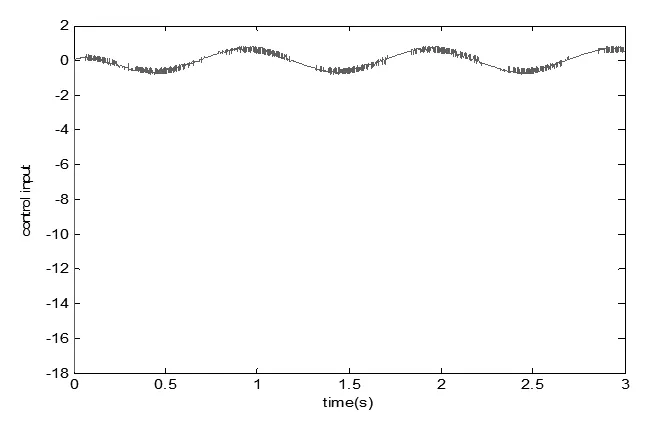
图4 控制输入信号
取系统初始状态[0.5 0],C=[3 1],K=[-100-10],,位置指令取r=0.5sin(2t),采用控制律式(7),仿真结果如图3和图4所示。
4.结果分析
本文是基于单自由度磁轴承系统的模型进行了研究,将滑模控制和自适应控制的思想结合,应用到控制磁轴承转子控制器中。本文研究的控制方法,从理论分析和仿真结果来看,都可达到单自由度磁轴承系统的运行要求,而且不依赖被控对象的精确数学模型,当外界干扰或者参数变化时,都可快速的达到稳定。增加系统了鲁棒性,减小了一定的稳定误差,而且减小了常规滑模控制器的固有抖振。
引文
①胡业发,周祖德,江征风.磁力轴承的基础理论与应用[M].北京:机械工业出版社,2006.
②刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
③刘金琨.智能控制[M].北京:电子工业出版社,2005.
④Lin F J,Chiu S L,Shyu K K.Novel sliding model controller for synchronous motor drive.IEEE Transanctions on Aerospace and Electronic Systems,1998.34(2):532-542.
