机器视觉在核电站蒸发器涡流检测中的应用
2018-10-19,,,
,, ,
(中广核检测技术有限公司, 苏州 215000)
1 背景
1.1 设计目的
核电站系统中蒸汽发生器传热管承担着热量交换的关键作用,运行中由于机械或者化学机理会导致传热管降质,因此需要对其进行涡流检测。在蒸汽发生器传热管涡流检测过程中,涡流探头定位器在管板上进行移动、定位,将其上安装的探头定位至待检测的传热管管孔,然后通过相应的推送设备将涡流探头输送到传热管内部实施检测。因此,在整个检查过程中,涡流探头定位器的定位准确度非常重要,其可靠性必须得到保证。
为保证涡流探头定位器定位的准确度,必须每隔一段时间进行探头定位器的位置核对。采用的传统手段是在蒸汽发生器水室内放置高清广角云台摄像头,通过光纤网络将图像实时传送到岛外的视频处理设备上,采集人员用人眼观察显示器上的图像,核对探头定位器的当前位置与控制软件中显示的位置是否一致。该方法不仅耗时长、效率低,需要采集人员有一定的经验,并且一旦出现位置不一致的情况,从上次位置确认开始采集的数据均要作废,耽误检查时间窗口,极大地影响了检测效率和检测结果的可靠性。基于以上原因,笔者采用基于机器视觉的识别定位技术,开发了一套独立于当前涡流检测设备的辅助定位系统,实时监控探头定位器的位置,确保传热管涡流检测过程更加稳定、可靠、高效。
1.2 机器视觉简介
机器视觉是通过光学装置和非接触的传感器自动地接收和处理一个真实物体的图像,以获得所需信息的技术。其原理是采用CCD(Charge Coupled Device)或CMOS(Complementary Metal Oxide Semiconductor)相机或者其他图像拍摄装置将目标图像转换成模拟信号;然后将模拟信号转变成数字信号后传送给专用的图像处理系统;再根据亮度信息、像素位置信息等进行各种处理和运算,从而识别目标的特征;最后根据设定的阈值和其他条件得到判断结果,再控制执行模块进行相应的处理。
图像处理主要基于数字图像处理技术,对输入的图像进行几何变换、灰度变换、图像增强、边缘提取以及图像的分割、测量和识别等。
2 设计方案
2.1 整体思路
所设计的系统采用机器视觉识别技术,实时对蒸汽发生器管板孔位图像进行处理、识别。视觉相机安装在探头定位器上,采集到的图像数据通过网络传送到外环廊位置的电控箱内,然后通过光纤将图像数据传送到视觉图像处理电脑上;通过上位机软件对图像进行识别、处理,得到当前的管板号与位置信息,随后与采集电脑上的位置进行对比,以识别当前定位器是否处在正确的位置。
2.2 设计过程
2.2.1 图像捕捉及光照
正如人眼对物体的观察一样,要想看清楚物体,一双好的眼睛和一个好的光照环境缺一不可。机器视觉识别同样如此,如何确保定位器在蒸汽发生器水室内部作高速运动的情况下能对图像进行完整捕捉是视觉识别系统的一个关键技术要点。因此,研发人员在设计过程中选取了一种既体积小巧又具有非常高帧率的工业级相机(其稳定运行时帧率能达到100帧以上),能很好地在设备运动的过程中实现对图像的高速捕捉。
另外,由于蒸汽发生器内部为密闭空间,光照条件较差。为了获得足够的光照调节,研发人员在相机的前端添加了一组光照系统,以对待测区与背景区作明显的区分,达到增强待测目标边缘清晰度以及消除阴影和抵消噪光等要求。通过多次的试验及测试,最终选取了一种环形LED光源作为照明系统,该光源能很好地突出显示被测物体边缘和高度的变化,是边缘检测的理想选择。
2.2.2 控制系统
在整个系统中,控制单元主要需要实现两个功能:一是要能对前端光源进行远程调节,以满足不同环境下对光照条件的不同要求;二是要能将前端相机捕捉到的视频图像传输到专用计算机上,以作进一步的图像处理。
2.2.3 图像处理系统
针对设备的技术要求和使用需求,在图像处理软件算法的设计上,主要从以下思路入手。
(1) 通过软件对画面明暗的识别,结合轮廓识别来区分传热管和管板的边界。
(2) 软件快速捕捉画面,并快速比较前后两帧画面的变化,如果前后两帧画面没有变化,管号也不会发生变化;如果前后两帧的画面发生变化,则软件会识别出发生变化的传热管,并且认为两帧画面上离得最近的传热管为同一根传热管,具有同样的行列号。通过管子的行列号、其圆心在图像坐标系的坐标、管板坐标系以及图像坐标系的相对关系,计算出当前图像中的管板坐标系旋转的角度和平移的距离,进而推导出当前管板坐标系相对图像坐标系的关系。
(3) 结合对应的管板,设定好传热管固有的行列号的排布规则,并叠加到图像中。
(4) 在视觉相机获取图像以及图像远距离传输的过程中,图像信号常被噪声污染。噪声是引起图像质量、测量精度和对象识别准确度降低的一个重要原因。因此需要采用一定的图像滤波手段,用于提高图像数据中的信噪比,进行噪声抑制,减轻后续图像处理的压力。此系统采用图像中值滤波算法,能够在去除脉冲噪声、椒盐噪声的同时保留图像边缘细节。
(5) 边缘检测技术是图像处理中的一项重要技术,边缘检测的主要目的是实现图像的边缘识别,从而对目标图像进行精确定位。系统的边缘检测采用Canny算子[1],Canny算子具有较好的信噪比、高边缘定位性能和在噪声环境下较好的检测效果,适用于不同工况环境下的边缘检测。传统的Canny边缘检测方法用高斯滤波可能会存在使图像过度平滑以及对椒盐噪声和脉冲噪声敏感等问题,改用中值滤波后上述缺点有所改善,提高了图像质量。
(6) 蒸汽发生器管板的管孔轮廓为圆形,故系统采用对圆形目标识别非常有效的图像识别算法——Hough梯度法[2]。Hough梯度法首先需要对图像进行边缘检测,对边缘图像中的每一个边缘点,计算其局部梯度,利用得到的梯度,由斜率指定直线上的点作为圆心在累加器中累加;然后,将累加器中大于给定阈值并且大于其所有近邻的点选出来,作为候选圆心。最后依据圆心距、最大最小半径等限定条件筛选出所有的圆心。某原始图像及其经过各方法处理后得到的图像如图1所示。
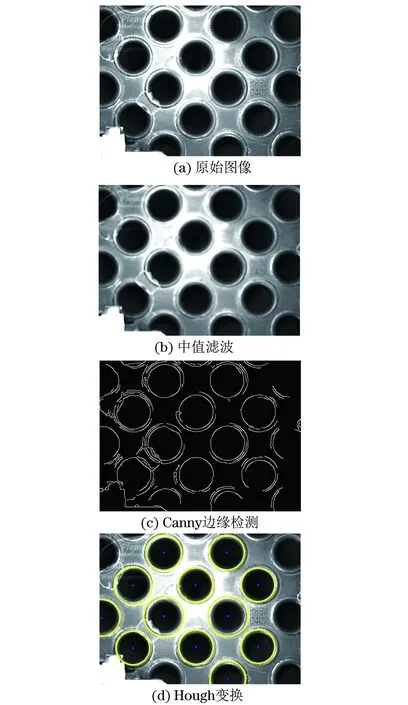
图1 某原始图像及其经各方法处理后的图像
(7) 为了实现定位器在运动过程中的位置识别,要求算法必须执行速度快,保证抓取相邻两帧图像的间隔时间足够短,而爬行器在此期间只进行了微小运动。
(8) 系统可能会用于不同机组类型(CPR或EPR)的蒸汽发生器的不同端(冷端或者热端)的涡流检测中。故针对冷、热端行列号定义不同的问题,在软件上进行了整合,以满足现场的实际需求。同样也对不同的机组类型进行了整合,实现了对CPR堆型管板正方形排布和EPR堆型管板三角形排布的兼容使用和算法优化。
2.3 系统组成
结合以上的设计方案,最终设计完成的系统主要由以下几大功能模块组成:相机单元,附带照明系统(见图2),控制箱单元(见图3),软件单元(见图4)。

图2 相机单元

图3 控制箱单元

图4 软件单元
3 系统测试及结果
3.1 性能测试
该系统在实际使用前,在实验室模拟体上进行了一系列的严格测试,以保证现场实际使用时的稳定性和可靠性。测试项目包括:光源测试、识别能力测试、整体稳定性测试。其具体测试内容如下:
(1) 光源测试:在手动控制及软件控制两种模式下,随机调节光源的亮度,测试并记录光源的稳定性;
(2) 识别能力测试:将定位器安装在蒸汽发生器管板模拟体上,使用采集电脑随机控制探头定位器运动,测试过程中观察蒸汽发生器管板模拟体上探头定位器的实际位置,与机器视觉识别定位软件上显示的行列号是否一致;
(3) 整体稳定性测试:将定位器安装在蒸汽发生器管板模拟体上,连接系统各部件(光源、相机、电控箱以及电脑),进行整体稳定性测试。测试过程重点关注系统硬件以及软件的稳定性和可靠性。
经过对各系统模块以及整体稳定性的测试,结果表明,该系统稳定性和可靠性均满足相关技术要求,其性能能够满足现场的应用要求。
3.2 实际应用效果
在宁德核电站3号机组N302大修蒸汽发生器传热管的涡流检测中,该系统首次应用于实际检测。从实际使用情况来看,该设备性能良好,准确性、可靠性以及稳定性均满足技术规范要求,在连续5 d的工作中,圆满完成了管板爬行器的机器视觉定位工作。
4 结语
视觉定位系统采用动态识别算法,独立于涡流检测的控制系统,视觉定位系统和设备控制系统的位置信息可以互相验证。其远程可调光源和高性能工业相机为该系统提供了坚实的硬件基础;软件算法稳定高效,满足大于100帧·s-1的实时处理要求。经过实验室以及现场测试、使用,视觉定位系统全程运行稳定,操作简便,可靠性高。在使用过程中,能辅助采集人员进行定位,增加了额外的位置信息,使得蒸汽发生器传热管涡流检测工作更加便捷、可靠。一系列的测试证明,该系统能满足现场使用要求,可胜任涡流探头定位器的辅助定位工作。
