基于贝叶斯理论框架的传感器选择算法
2018-10-18郭军军韩崇昭
郭军军 韩崇昭
随着传感器技术和雷达量测技术的飞速发展,传感器的种类和数目变得越来越丰富,因此在目标跟踪场景中,我们可以使用大量的传感器同时对空间目标进行跟踪和检测.近年来,多传感器甚至大规模传感器网络目标跟踪技术得到了越来越广泛的应用[1−3].
使用大规模传感器网络对空间目标进行跟踪时,传感器由于受所处环境的影响,例如,量测空间中可能存在少量杂波干扰、传感器存在系统偏差等.特别是对于大规模传感器网络,几乎不可避免的传感器系统偏差干扰,给传感器网络数据融合带来了很大的影响.因此当外界环境存在量测扰动时,研究传感器网络目标跟踪问题是非常有意义的.
传感器对空间目标进行量测时,传感器自身固有的系统偏差通常是需要考虑的,一般而言,传感器恒定的系统偏差很容易进行估计.目前国内外已经有很多学者提出了许多的恒定系统偏差估计算法,例如,在地心地固(Earth-centered Earth-fixed,ECEF)量测坐标系中,文献[4]根据雷达的量测原理,提出了一种基于最小二乘估计法的传感器系统偏差估计算法;文献[5]提出了一种基于贝叶斯框架下的传感器系统偏差估计和航迹–航迹融合算法;文献[6]提出了一种基于期望最大化的联合传感器系统偏差估计、数据关联和数据融合算法;文献[7]提出了一种基于伪量测的传感器偏差估计和数据融合算法.
然而不幸的是,由于外界环境的扰动,传感器还可能存在偶然出现的未知系统偏差,即为偶发性的系统偏差[8].如果我们不考虑这部分系统偏差,很可能会导致传感器对空间目标的跟踪精度降低.目前我们主要有两种思路来解决这种偶发性的系统偏差问题.1)对这种偶发性的系统偏差进行估计和补偿,例如,文献[9]提出了一种基于广义似然比检验(Generalized likelihood ratio test,GLRT)的系统偏差估计和目标跟踪算法,即同时对这部分未知系统偏差出现的时刻和偏差大小进行估计,然后使用补偿后的量测值进行数据融合.然而偏差估计误差又不可避免地会对目标跟踪精度产生影响;2)从野值点检测和剔除的角度对该问题进行解决.目前广泛采用的野值点检测算法有最小二乘估计法[10]、多项式外推拟合法[11]、差分检测算法[12]等.然而上述野值点检测算法都依赖前几个时刻的历史数据.不同于上述野值点剔除方法,近年来国内外许多学者又提出了很多基于多传感器融合的野值点检测和融合算法,例如,文献[13]提出了两种基于量测残差和基于航迹关联方法的野值点检测和融合算法;文献[14]通过构造各个信源的残差序列来对野值点进行检测并且对量测结果进行修正等.类似于野值点的检测和剔除思想,本文试图用传感器选择的思路来处理该问题,即根据传感器网络获得的全部量测数据,对传感器资源进行合理的管理,仅仅选择不存在偶发性系统偏差的传感器进行数据融合.
传感器选择算法[15−17],作为一种非常有效的传感器网络量测数据处理方法,近年来得到了越来越广泛的应用.传感器选择算法仅仅只选择量测结果中跟踪结果较好的数据进行融合,同时又不需要消耗更多的量测资源.因此不仅能够提高量测资源的使用效率,还能有效提升整个传感器网络的跟踪精度以及目标跟踪的稳定性.
目前国内外许多学者已经提出了很多基于传感器选择的目标跟踪算法.传感器选择算法通常的处理思路为:首先给定一个传感器网络的优化准则,然后根据这个准则进行优化,从而得到传感器网络的选择方案.例如,文献[18]和文献[19]分别使用后验克拉美–罗下界和克拉美–罗下界作为优化准则来实现传感器网络的在线选择和数据融合;文献[20]和文献[21]将传感器选择问题转化为一个组合优化问题,然后使用交叉熵(Cross-entropy)优化准则来实现传感器选择和数据融合;文献[22]和文献[23]使用传感器网络最终估计误差的协方差矩阵的迹作为优化准则来实现传感器网络的选择和信息融合;类似地,文献[24]将状态估计中的置信椭圆的大小作为优化准则来进行传感器选择;为了有效降低传感器网络的数据传输量,文献[25]将大规模传感器网络分解为若干个较小的传感器子网络,然后再基于克拉美–罗下界的优化准则[26]进行传感器选择.通过分割传感器网络,使得传感器网络的数据传输量大大降低.不同于上述所有的传感器选择算法,本文提出了一种全新的基于贝叶斯理论框架下的传感器选择算法,通过极大化基于当前时刻全部信息量的条件概率密度函数的对数似然函数来获得传感器网络的传感器选择方案,属于传感器选择问题的一种全新的求解思路.而且本文提出的传感器选择算法,考虑了量测空间的少量杂波干扰和由于环境干扰引起的量测偏差.因此,本文提出的传感器选择算法可以更加广泛地应用于多传感器目标跟踪场景中.
本文基于贝叶斯(Bayes)框架,提出了一种基于传感器选择的传感器网络目标跟踪算法.具体思路为,1)在Bayes框架下,求解基于当前时刻全部信息量的条件概率密度函数的对数似然函数,并且根据不同的优化目标,推导出传感器选择的目标函数;2)根据优化准则,求出对应的传感器选择方案,并且对传感器网络进行管理;3)对所选择的传感器进行数据融合,获得传感器网络对空间目标的跟踪结果.
1 问题描述
1.1 基本假设以及符号定义
文中的一些基本假设以及用到的符号如下:
1)假设
a)大量离散分布的传感器同时对空间目标进行跟踪,且各个传感器独立进行量测;
b)空间中不同目标之间是相互独立的;
c)由于受外界环境的影响,传感器可能存在偶然出现的未知系统偏差;
d)传感器的量测空间存在少量量测杂波的干扰,某一时刻传感器获得的所有量测值中,对每个目标至多有一个是真实的量测,其余的都是杂波,杂波与真实量测独立,且杂波之间也是相互独立的.
2)符号定义
a)Yts,k:k时刻,传感器s∈{1,···,n}对目标t∈{1,···,m}的有效量测向量的集合;
b)Yks:k时刻,传感器s对空间所有目标的有效量测的集合,且Yks={Yts,k|t=1,···,m};
c)Yk:k时刻,空间所有n个传感器对空间所有m个目标的有效量测集合,且,···,n};
e)Xk:k时刻,空间所有m个目标的状态向量的集合,且.
1.2 目标运动方程和量测方程
不妨假设n个传感器同步地对空间中的m个运动目标进行监测.目标t∈{1,···,m}的运动模型可以描述为

传感器s∈{1,···,n}对空间目标t的量测方程可以表示为

然而,传感器在量测过程中,难免会受到外界环境的干扰,例如:1)少量量测杂波的干扰.量测杂波假设为:传感器量测空间中,杂波数量服从密度为λ的泊松分布,杂波在量测空间中均匀分布,且杂波量测之间相互独立.2)传感器可能存在偶然出现的未知系统偏差.
因此,k时刻,传感器s获得的量测向量的集合可以表示为
2 基于Bayes理论的传感器选择算法
在大规模传感器网络目标跟踪中,本文提出了一种基于Bayes理论的传感器选择算法.
2.1 获取有效量测向量的集合
不妨假设k−1时刻,传感器网络对空间目标t的估计结果为, 类似于概率数据关联(Probability data association,PDA)算法[27],k时刻传感器s对空间目标t的有效量测集合Yts,k为
其中,∈为门限阈值(Gate threshold),且
因此,k时刻,传感器网络对空间所有目标的有效量测集合可以表示为,t∈{1,···,m}}.
2.2 传感器选择的目标函数
不失一般性,不妨假设k−1时刻传感器网络对空间所有目标的跟踪估计结果. 我们定义空间所有目标的状态向量为,同时我们定义lks为传感器s的选择指示函数,lks=1表示k时刻传感器s被选中;反之lks=0表示k时刻传感器s未被选中,即为

因此,k时刻传感器网络的选择指示函数可以表示为Lk={lks|s=1,···,n}.
根据第2.1节,可以很容易求得传感器s对空间目标t的有效量测集Yts,k,同时为了建立Yts,k与空间目标t的关联关系,我们定义Φst,k为有效量测集合Yts,k对空间目标t的关联向量,且

其中,Nts,k为k时刻,传感器s对空间目标t的有效量测值的个数.对于为量测向量对空间目标t的关联变量,且满足
为了保持公式推导过程中的简洁性,定义

其中,Φk表示传感器网络中所有传感器对空间所有目标关联向量的集合.
根据Bayes公式,k时刻,在ρk−1的条件下,基于传感器网络当前全部量测信息的条件概率密度函数p(Xk,Φk,Yk|Lk,ρk−1) 可以表示为
本文假设m个空间目标之间相互独立,且各个传感器之间是独立量测的,因此式(5)等价为
式(6)两边取对数,即
我们定义
如果k时刻,传感器s未被选中,即lks=0,此时;反之,传感器s被选中,即,此时.
因此,可得

根据本文中的假设,可知传感器s对空间目标t的有效量测集合Yts,k中的各个量测值之间是条件独立的,因此可得

因此,式(9)可以等价为
其中,c1,c2都为已知参数.
将式(8),(9)和(12)代入式(7),可得式(13),其中,c3为已知参数.
然后对该对数似然函数(式(13))求条件期望,得到传感器选择的目标函数.
首先,基于全部传感器量测信息Yk,定义目标状态向量的条件期望和条件协方差矩阵分别为

因此,全部量测值Yk条件下,式(13)对空间目标状态向量xk的条件期望,得到当前k时刻传感器选择的目标函数,即

由于式(13)中,Item1项与传感器量测无关,因此求解传感器选择的目标函数时只考虑Item2项,即

求解Item2项的条件期望时,可知
同时可知,k时刻,状态向量xtk近似服从


其中
因此,可得
将式(17)和式(18)代入式(16)中,可得
其中,

因此,Item2项的条件期望为
其中,
通过极小化传感器选择的目标函数求解传感器选择方案Lk,即
其中,nk为k时刻被选择的传感器的数量,且1≤nk≤n.
目标函数的解释:目标函数中,γks表征传感器s的所有量测向量与量测一步预测向量间马氏距离基于关联向量的加权(见式(19)).其中,χst,k(j)为量测残差,当某个传感器量测值存在由于外界扰动而产生的量测偏差时,由该传感器量测值求得的会很大,因此本文提出的传感器选择算法可以检测出传感器是否存在偶然出现的未知系统偏差.通过对所有量测数据进行比较,然后进行传感器选择,抛弃掉那些会对空间目标产生较大跟踪误差的传感器.
当传感器可能存在由于环境的扰动而产生未知系统偏差时,目标函数可以表征传感器对空间目标量测的好坏.通过极小化传感器选择的目标函数,根据本文提出的传感器选择算法,从所有传感器中,选择nk个传感器进行数据融合,得到整个传感器网络对空间目标的跟踪结果.
根据求得的目标函数(20)以及传感器选择的目标(21),本文提出的传感器选择算法可以总结为:
算法1.传感器选择算法
输入.当前k时刻,传感器网络量测值的集合Yks,传感器选择数目nk以及k−1时刻传感器网络对空间目标的估计结果ρk−1.
输出.当前k时刻传感器网络的选择方案Lk.
步骤1.根据式 (20),求得{γks|s=1,···,n};
步骤2.将求得的按从小到大的顺序重新排列,得到;
步骤3.根据式(21)中传感器选择的目标以及nk,从中选择前nk个传感器;
步骤4.得到量测k时刻的传感器选择方案Lk.
2.3 数据融合算法
根据前面提出的传感器选择算法,可以得到k时刻被选择的传感器的集合Θk.然后将所选择的传感器进行数据融合.具体的数据融合过程为:
对于选中的传感器j∈Θk,根据PDA算法,可以求得该传感器对空间目标t的估计结果为,然后将估计结果传送到融合中心进行数据融合.
为了防止目标t共同的先验信息对当前k时刻的数据融合造成干扰,因此定义k时刻,传感器j的增量信息矩阵Γtj,k|k和增量信息向量ρtj,k|k分别为
综上所述,Bayes框架下,基于传感器选择的传感器网络目标跟踪算法可以总结为:
算法2.基于传感器选择的传感器网络目标跟踪算法
输入.空间所有目标的状态初值和协方差矩阵初值.
输出.空间所有目标的估计结果.
Fork=1,···,N
步骤1.对于传感器s,求出量测的一步预测;
步骤2.根据式(3)求出传感器s的有效量测集;
步骤3.对于给定的Yts,k,利用数据关联算法,求出数据关联向量;
步骤4.根据式(20),求出传感器选择的目标函数Jk;
步骤5.根据第2.3节提出的传感器选择算法,求出;
步骤6.根据式(22)和式(23)对选择的传感器进行数据行融合,求得;
步骤7.Ifk<N,k=k+1;ElseBreak;
End For
3 数值仿真
3.1 仿真场景
考虑如下仿真场景:8个离散分布的传感器同步地对量测空间中的目标进行观察,传感器的坐标分别为O1=(0km,0km),O2=(1.5km,1km),O3=(1.2km,1.1km),O4=(2km,2.1km),O5=(1.6km,1.7km),O6=(1.4km,2.1km),O7=(0.42km,1km),O8=(1.2km,1.9km).具体的仿真场景如图1所示.
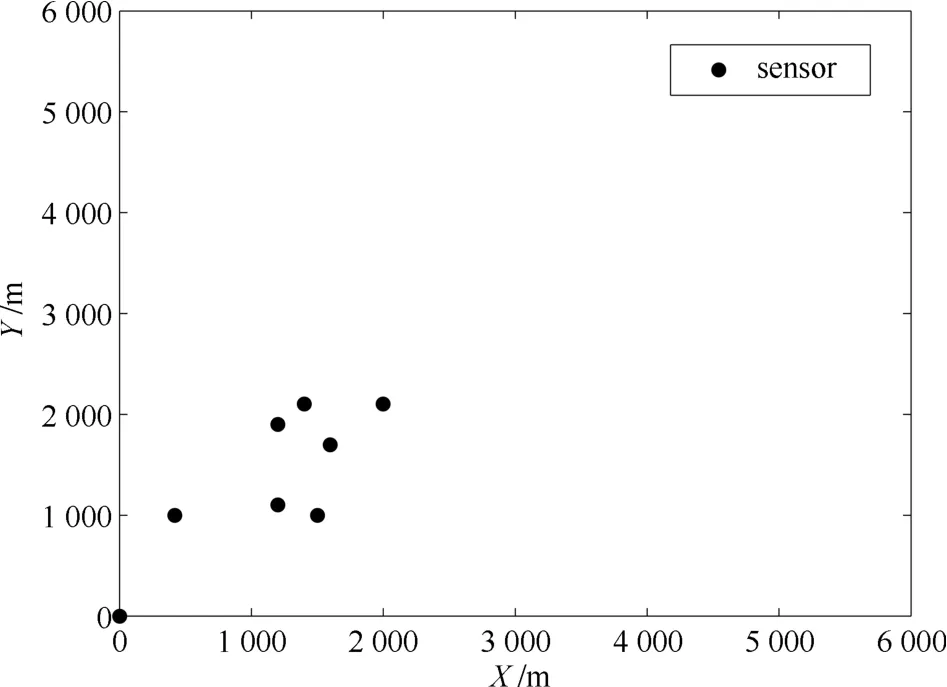
图1 传感器网络仿真场景Fig.1 Geometry of the sensor network
空间目标的运动模型可以描述为

其中,采样间隔T=1s.
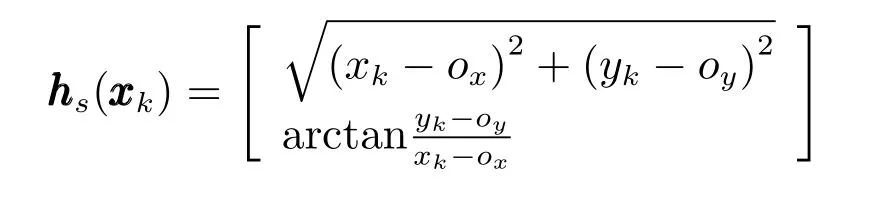
传感器的量测模型可以表示为
其中,量测噪声方差矩阵R=diag{(10m)2,(0.1mrad)2},且量测为零均值的高斯白噪声,量测协方程满足
然而传感器网络在量测过程中,不可避免地要受外界环境的干扰,主要考虑以下几个方面的量测干扰:1)量测空间中存在少量杂波干扰;2)传感器可能存在由于外界环境的扰动而造成的未知系统偏差.因此,本文假设:1)杂波:杂波数目服从密度为λ=0.05的泊松分布,且杂波在量测空间中均匀分布;2)量测偏差:传感器2和传感器4由于外界扰动,存在未知的系统偏差,系统偏差变化情况如图2所示.
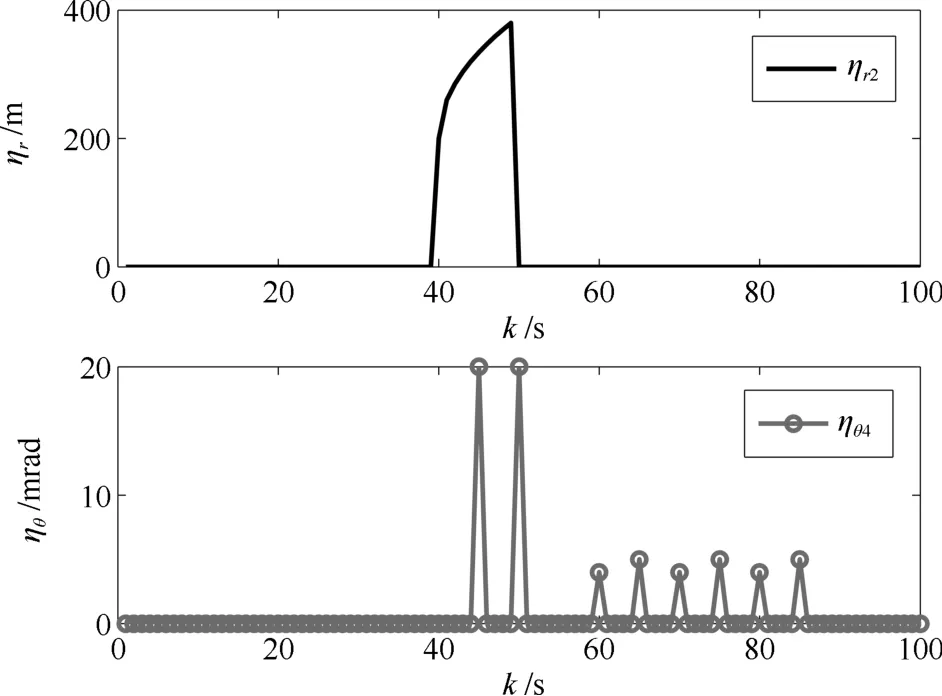
图2 传感器系统偏差跳变变化情况Fig.2 Sensors′bias change via sampling time
本文传感器选择的目标:从8个传感器中选择其中量测效果最好的5个传感器进行数据融合,使得传感器网络对空间目标的跟踪精度最好.
3.2 单目标跟踪

目标状态初值为

协方差矩阵的初值为
为了证明本文所提算法的有效性,将以下6种算法进行对比仿真:
1)文献[10]算法:基于最小二乘法的自适应野值剔除和加权融合算法(Least squares);
2)文献[11]算法:基于多项式外推拟合法的野值剔除和加权融合算法(Polynomial);
3)文献[13]算法:基于量测一步预测向量的野值剔除方法(Residual);
4)文献[9]算法:试图对系统偏差进行估计的目标跟踪算法(Bias registration);
5)本文提出的两种传感器选择算法(Sensor selection);
6)使用全部量测数据的传统目标跟踪算法(Traditional approach).
空间目标的真实轨迹和传感器网络对空间目标的估计轨迹如图3所示.基于100次蒙特卡洛
不妨假设空间目标的真实状态初值为(Monte Carlo,MC)仿真,传感器网络对空间目标位置估计的对数均方根误差(Root mean square error,RMSE)结果随采样时刻的变化曲线如图4所示.仿真结果表明:本文提出的传感器选择算法可以准确地对空间目标进行估计,且跟踪精度优于文献[10]算法、文献[11]算法、文献[9]算法和使用全部量测数据的传统目标跟踪算法.由于上述4种算法对空间目标的跟踪精度明显不如本文所提的算法.因此下面重点定量的对照文献[13]算法和本文算法.
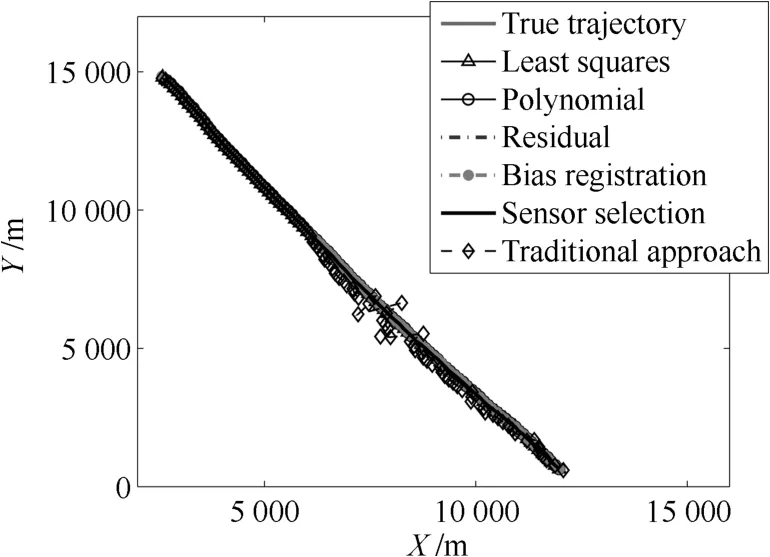
图3 真实轨迹和估计轨迹Fig.3 True trajectory and the estimated trajectories
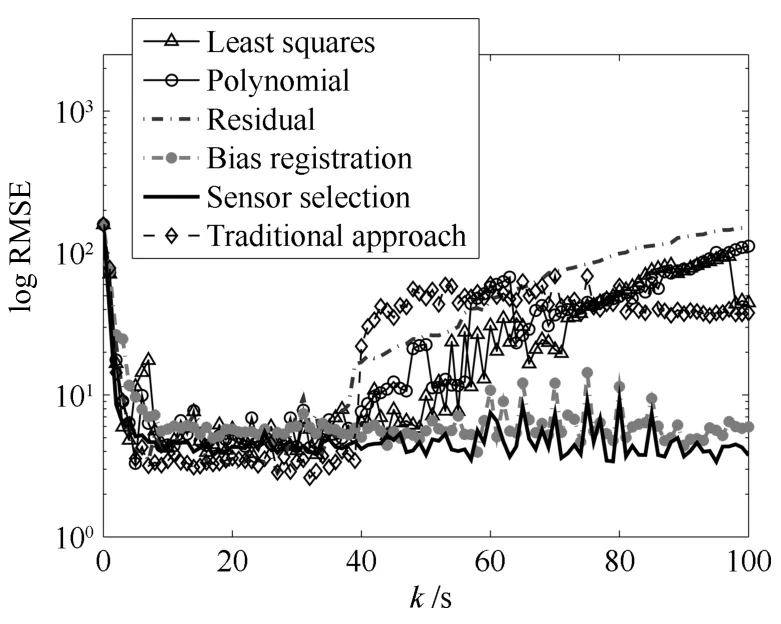
图4 位置估计RMSE结果的对数值随时间的变化曲线Fig.4 The logic RMSE results on target position via sampling time
基于M=1000次MC仿真,我们首先定义传感器的选择概率为
其中,Ns表示1000次MC仿真中,传感器被选择的次数.
本文数值仿真部分,基于1000次MC仿真,近似地用ps表征传感器的选择性能.传感器选择概率ps随传感器未知系统偏差跳变ηr和ηθ的变化情况如图5所示.假设所有传感器在量测过程中的量测噪声协方差矩阵都为R=diag{(10m)2,(0.1mrad)2},λ=0.05.
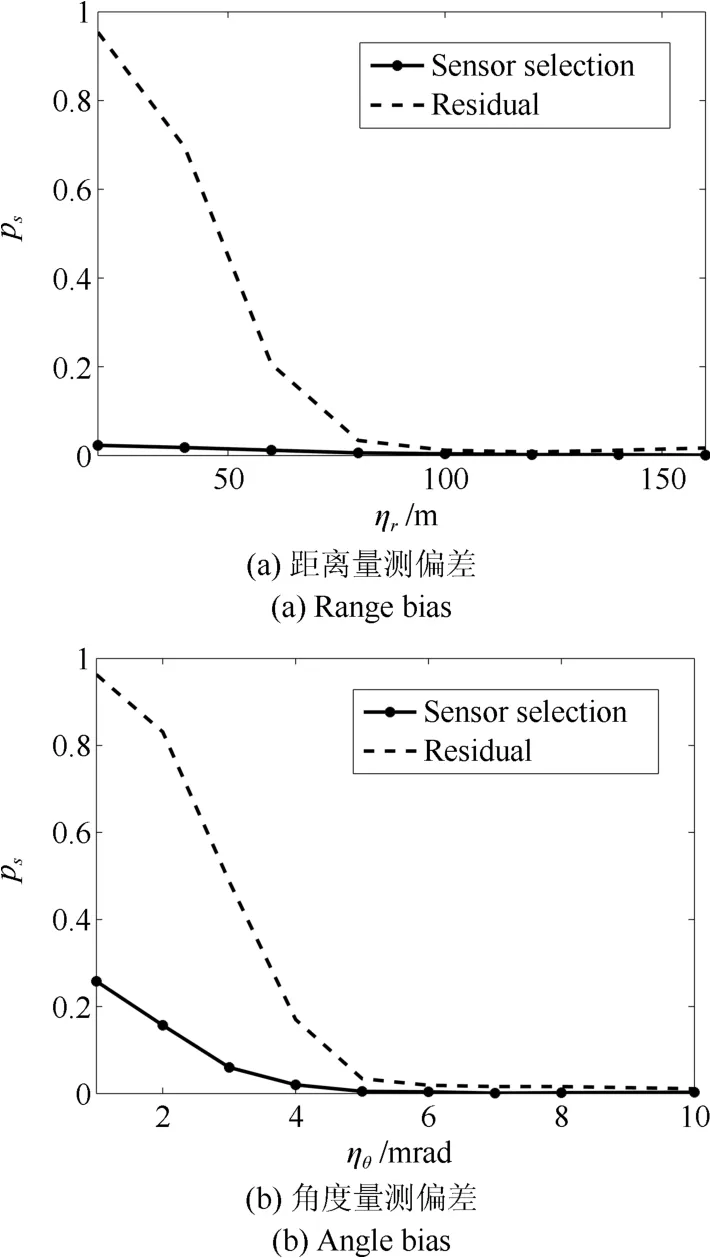
图5 传感器选择概率随系统偏差的变化情况Fig.5 Sensor selection probability via bias change
数值仿真结果表明:当传感器的距离系统偏差跳变ηr<80m 或角度系统偏差跳变ηθ<5mrad时,对照文献[13]算法对系统偏差跳变的检测能力明显不如本文所提算法.因此推断:当传感器存在较小的系统偏差跳变时,文献[13]算法对空间目标的跟踪性能也会弱于本文所提算法;随着传感器系统偏差跳变的增加,两种算法的传感器选择概率ps迅速降低至接近为0.
相应地,文献[13]算法和本文算法对空间目标位置估计的RMSE结果随系统偏差跳变量的变化情况如图6所示.数值仿真结果表明:当传感器系统偏差的跳变量较小时,由于文献[13]算法对系统偏差跳变的检测能力较差,而本文算法对较小的系统偏差跳变依旧具有很好的检测能力,因此本文算法对空间目标位置估计的RMSE结果远远小于文献[13]算法的RMSE结果;当传感器系统偏差的跳变量较大时,两种算法对系统偏差的检测能力基本相同,因此两种算法的RMSE结果较接近.数值仿真结果证明了本文提出的传感器选择算法有很好的鲁棒性.
算法运行时间也是衡量算法性能好坏的一个关键要素.几种对照算法的算法复杂度都相同,都为O(mNsk).所用计算机的硬件配置为Intel(R)Core(TM)i5-4570,3.20GHz;4GB RAM.基于100次蒙特卡洛仿真,运行一次完整的采样过程k=1s,···,100s,对照算法的算法平均运行时间如表1所示.
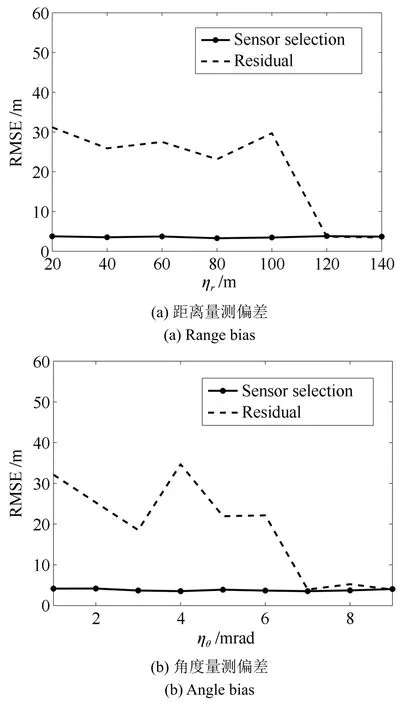
图6 RMSE随量测偏差的变化情况Fig.6 RMSE via bias change magnitude
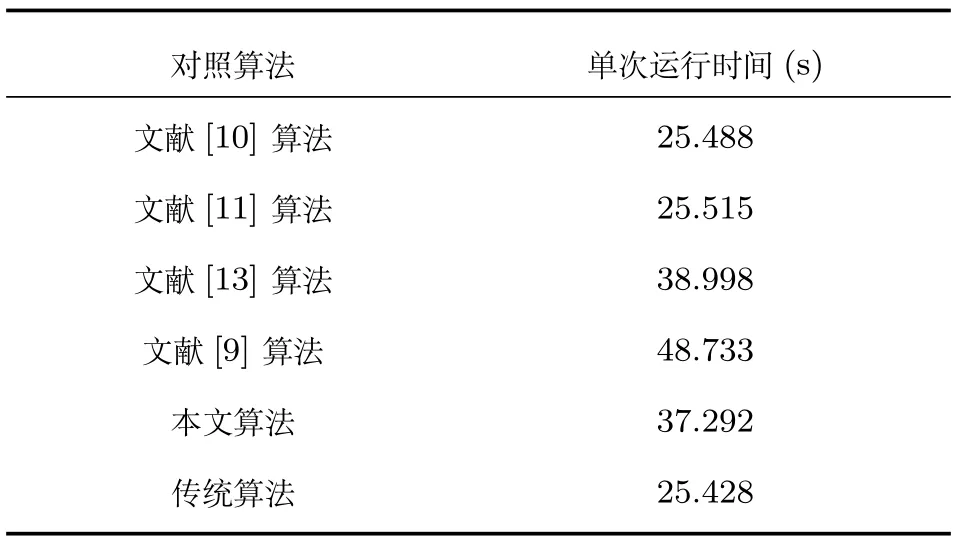
表1 算法单次平均运行时间(基于100次蒙特卡洛仿真)Table 1 One run time of the proposed approaches(100MC runs)
从表1的数值仿真结果可以看出,使用全部量测数据的传统目标跟踪算法由于没有对量测数据进行处理,因此算法运行时间最短,然而该算法的目标跟踪性能也最差;文献[9]算法由于需要对系统偏差跳变进行检测和估计,因此耗时最多;文献[10]算法和文献[11]算法使用简单的野值点剔除算法进行野值点的判断和剔除,时间消耗相对较低,但是目标跟踪精度也较差;本文算法借助多传感器冗余信息处理的思想对传感器网络的量测信息统一进行处理及传感器选择,而文献[13]算法则采用3σ准则对各个传感器的量测野值点分别独立的进行判断,因此本文所提算法的运行时间要略低于文献[13]算法.
3.3 多目标跟踪场景
由8个传感器组成的传感器网路对量测空间中两个目标进行观测,仿真场景如第3.1节所示.空间目标的真实状态初值分别为

传感器网络对空间两个目标跟踪的初始状态分别为

初始的协方差矩阵都为P0=10000I4.仿真结果如图7和图8所示.
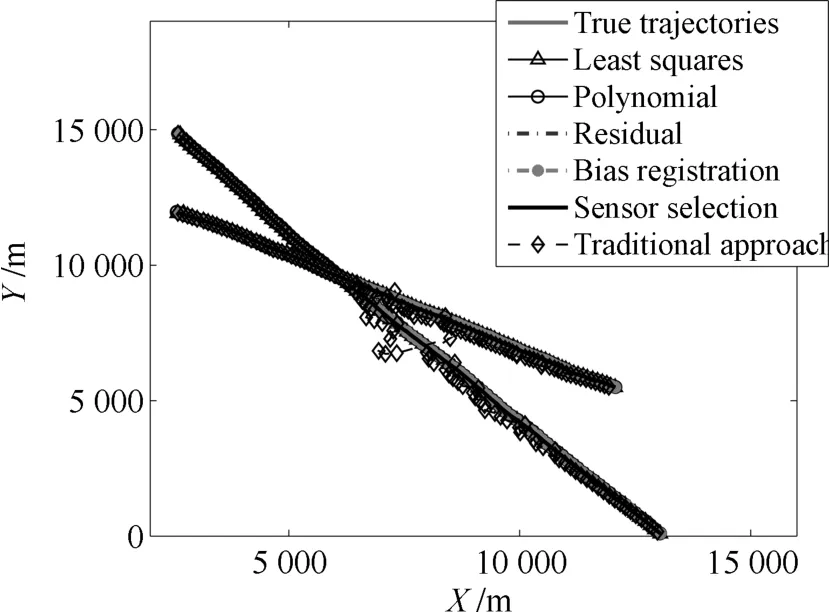
图7 真实轨迹和估计轨迹Fig.7 True trajectories and the estimated trajectories
空间目标的真实轨迹及传感器网络对空间目标的估计轨迹如图7所示,传感器网络对空间目标位置估计的对数RMSE结果随采样时刻的变化情况如图8所示.数值仿真结果表明:本文所提算法可以准确地对空间目标进行跟踪和估计,且跟踪结果明显优于其他几种对照算法,说明了本文提出的传感器选择算法的有效性.
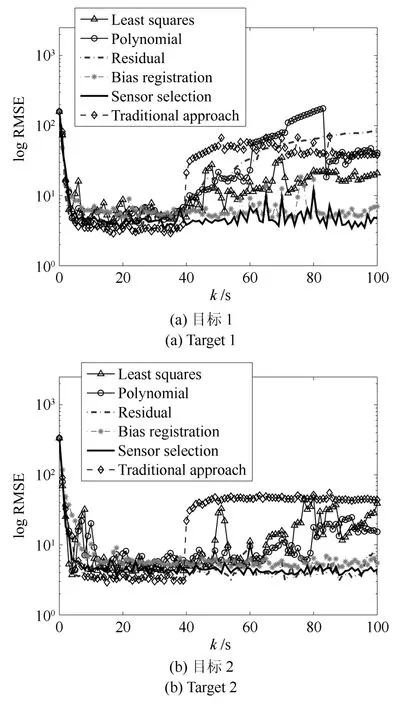
图8 空间目标状态位置估计的RMSE结果Fig.8 RMSE results on target position estimation
4 结论
传感器选择算法作为一种非常有效的传感器网络目标跟踪算法,近年来受到了越来越广泛的应用.本文提出了一种全新的基于贝叶斯理论的传感器选择算法来解决传感器网络目标跟踪问题.
本文的创新点可以总结为:1)本文试图用传感器选择的思路来解决可能带偶然未知系统偏差(即偏差跳变)的大规模传感器网络空间目标跟踪问题;2)本文提出了一种全新的基于贝叶斯框架的传感器选择算法来解决传感器网络目标跟踪问题;3)考虑了实际跟踪场景中的各种干扰因素,如少量杂波量测的干扰,环境干扰引起的未知偏差等;4)基于蒙特卡洛仿真讨论了不同的量测偏差对传感器选择以及目标跟踪精度的影响;5)对单目标和多目标跟踪场景分别进行仿真研究,并与传统的目标跟踪算法进行对比,证明了所提算法的有效性.
众所周知,基于随机有限集理论的方法是处理多传感器多目标跟踪问题的一个重要方法,我们将在下一步对基于随机有限集理论的传感器选择问题进行深入研究.
