基于量化依赖Lyapunov函数的有界丢包网络控制系统的保成本控制
2018-10-18唐晓铭杨爽虞继敏屈洪春
唐晓铭 杨爽 虞继敏 屈洪春
网络控制系统(Networked control systems,NCSs)是一种空间分布式系统,其控制回路中的传感器、控制器、执行器由有限带宽的通信网络相连接[1−3].与传统的控制系统相比,NCSs具有可靠性高、易于维护和扩展、能实现信息资源共享以及远程控制等优点[4−6].但网络特有的属性例如数据丢包、网络时滞等问题也给控制系统带来了不可忽视的负面影响.其中数据丢包是造成系统性能恶化甚至破坏系统稳定性的主要因素.很多学者研究了具有丢包的NCS的稳定性分析和控制器设计问题并得到了很有意义的结论[7−12],其中文献[7]运用随机丢包模型研究了NCS的H∞控制问题.文献[8]研究了具有马尔科夫丢包的量化系统的预测控制综合问题.文献[9]研究了具有丢包和多包传输的NCS的稳定性问题.文献[10]研究了有界丢包网络环境下的多包不确定系统的鲁棒预测控制问题.然而文献[7−10]仅考虑了丢包存在于传感器与控制器之间即单边丢包的情况,由于丢包往往同时存在于传感器与控制器、控制器与执行器之间,即双边丢包,因此文献[7−10]的结果有一定局限性.文献[11]考虑任意有界丢包过程,解决了具有输入约束和状态约束的模型预测控制综合问题.文献[12]考虑有界丢包和马尔科夫丢包两种情况,分析了系统的状态反馈镇定问题.
近年来,由于有限精度算法在数字计算机中的应用,大量学者开始研究量化反馈控制问题[13−22].在众多研究成果中,主要采用了静态量化[23−27]和动态量化[28−32]两种量化方法.由于后者能动态调整量化水平而增加吸引域,因此在处理系统稳定性问题上更具有优势.然而,由于缺乏统一的研究方法导致其在控制性能问题上仍具有局限性.文献[23]基于模态依赖的对数量化器,提出了马尔科夫非线性系统的量化动态输出反馈控制器设计方法.文献[24]研究了单输入单输出线性时不变系统的量化反馈镇定问题,证明了对数量化器对于二次型稳定系统的必要性.文献[25]综合研究了关于带有对数量化器的单输入单输出系统和多输入多输出系统的状态反馈和输出反馈镇定问题,文中量化误差被处理为区间不确定性,由此将量化反馈控制问题转化为鲁棒控制问题.在文献[25]的基础上,文献[26]提出了量化依赖Lyapunov函数方法,用以处理单输入和多输入量化反馈系统的镇定问题和H∞控制问题.
本文考虑双边丢包的情况,给出了单输入和多输入两种情况下的量化反馈网络系统的保成本控制器设计方法.在分别分析双边丢包过程的基础上,建立了带有对数量化器的NCS数学模型,进而将具有丢包和量化的NCS的镇定问题转化为镇定一系列系统的鲁棒控制问题.基于线性矩阵不等式(Linear matrix inequality,LMI)技术,得到了保成本控制器的设计方法.本文最典型的特点是运用量化依赖Lyapunov函数得到了相较于文献[25]中二次型Lyapunov函数方法保守性更弱的结果.
注1.本文中,I表示相应维数的单位阵,Rn表示n维欧氏空间(R即R1).对于向量x, u和矩阵,有.在对称矩阵中,用星号∗表示对称部分.
1 问题阐述
假设被控对象为如下线性离散时不变系统:

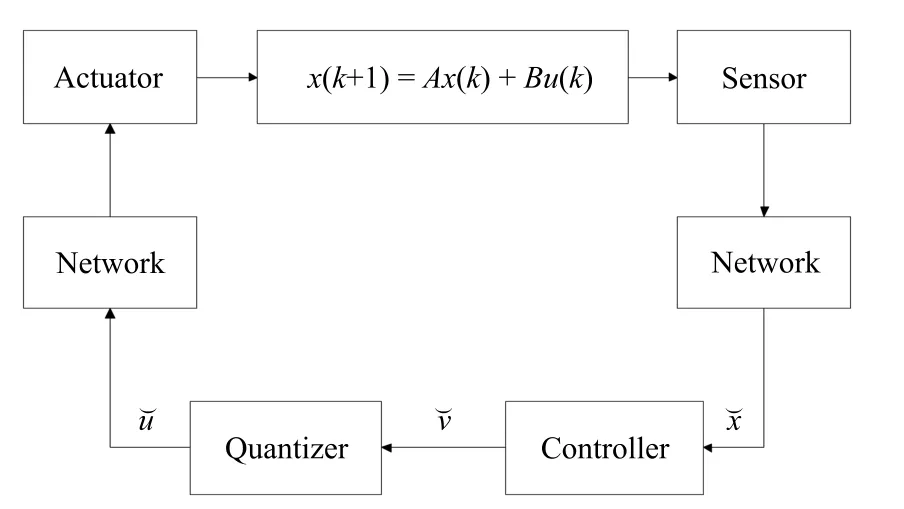
图1 NCS结构图Fig.1 The structure of NCS
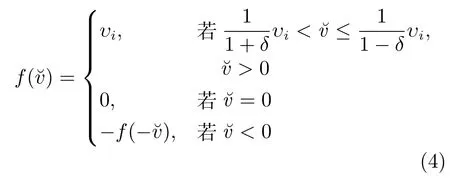
量化水平集为
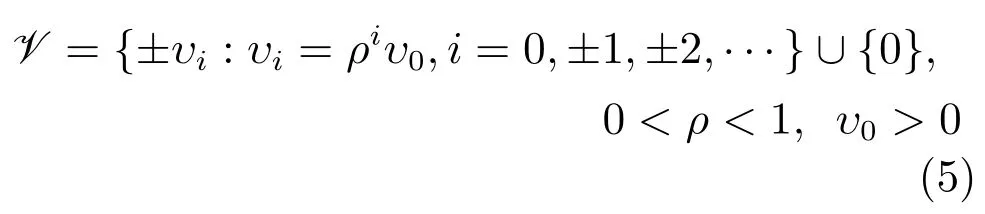
其中,ρ表示量化器密度.δ=(1−ρ)/(1+ρ).假设ρ已知,则δ已知,并且满足0<δ<1.定义量化误差为

其中,∆(k)∈[−δ,δ].
定义1[4].令表示从传感器到控制器成功传输数据的时间点序列,令表示从控制器到执行器成功传输数据的时间点序列,都是序列的子序列.令为数据从传感器到控制器的丢包上界,为数据从控制器到执行器的丢包上界.有界丢包过程定义为,其中,分别从中任意取值.
只有部分成功传输的数据能影响闭环系统,因此引入排序因子ord{·}来定义这部分数据.对于任意整数序列,排序因子在不增加或减少任何元素的情况下,对原有整数序列按从小到大的顺序进行排序,将得到的序列称为有序序列.令,其中,对于两个不相等的正整数a,b,如果出现ia=jb的情况,则在中jb位于ia之前.因此有序序列存在且唯一,使,有序序列σ为实际影响闭环系统的时间序列.
引理1[11].对于定义1中的丢包过程,有µr−,其中,.
上式可以等价为如下模型:
取如下扩展状态变量:

则系统(7)可改写为如下的等价模型:

如果t=1,
2 主要结果
2.1 单输入情况
本文采用量化依赖Lyapunov函数方法设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性.构造如下形式的Lyapunov函数:

其中,P(∆(µr))时变且依赖于量化误差∆(µr),有如下形式:

其中,P1和P2正定.保成本性能指标为
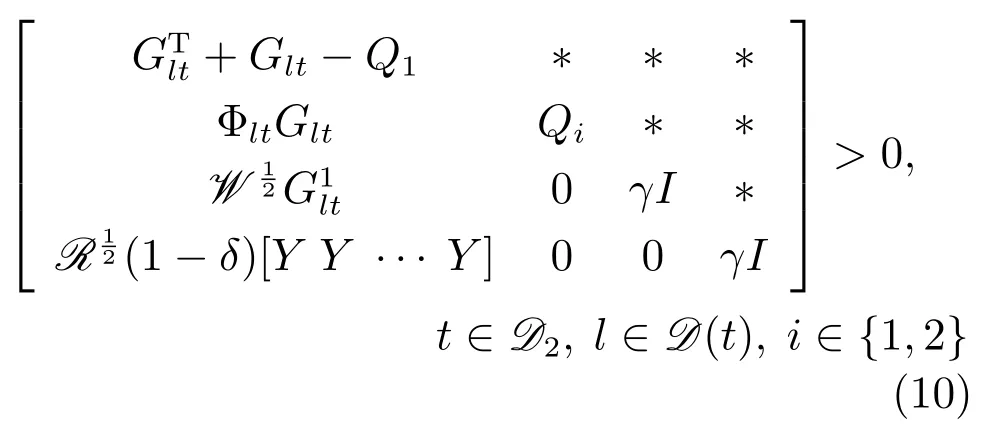
定理1.考虑如图1中的离散时间系统及对数量化器(4),如果存在矩阵Q1>0,Q2>0,Y,Glt和γ满足如下LMIs:


2.2 多输入情况
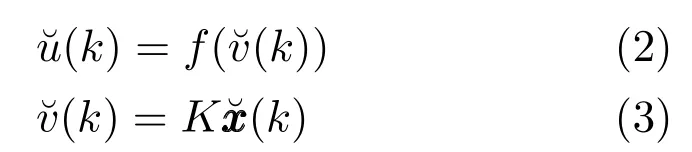
以上考虑的是单输入的情形,接下来将量化依赖Lyapunov函数方法拓展到多输入的情况.同样考虑线性离散时不变系统(1),其中系统输入u(k)∈Rm,量化反馈为
其中,fi(·)是量化器输入v(k)的第i行对应的量化器.同样假设fi(·)为式(4)中的对数量化器,则

其中,Λi(k)∈[−δi,δi].可得系统闭环模型为
通过研究发现,式(31)中的Λ(k)可表示为
其中,Λ(j)是对角矩阵,只包含元素−δi或δi,2m种−δi或δi的组合得到所有的Λ(j).因此系统闭环模型(32)可转化为
针对多输入情况,设计保成本控制器及分析具有双边丢包量化反馈系统的稳定性,有如下定理:
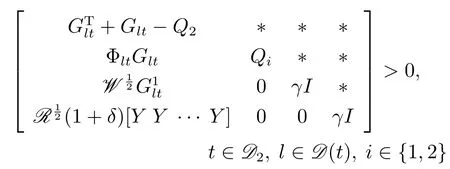
定理2.考虑如图1中的离散时间系统及对数量化器fi(·),如果存在矩阵Qi>0,Qj>0,Y,Glt和γ满足如下LMIs:
其中,ϕ={1,2,···,2m}.那么,存在保成本控制器(28)使闭环系统(32)渐近稳定,且量化状态反馈控制器为

证明.构造形如式(9)的Lyapunov函数
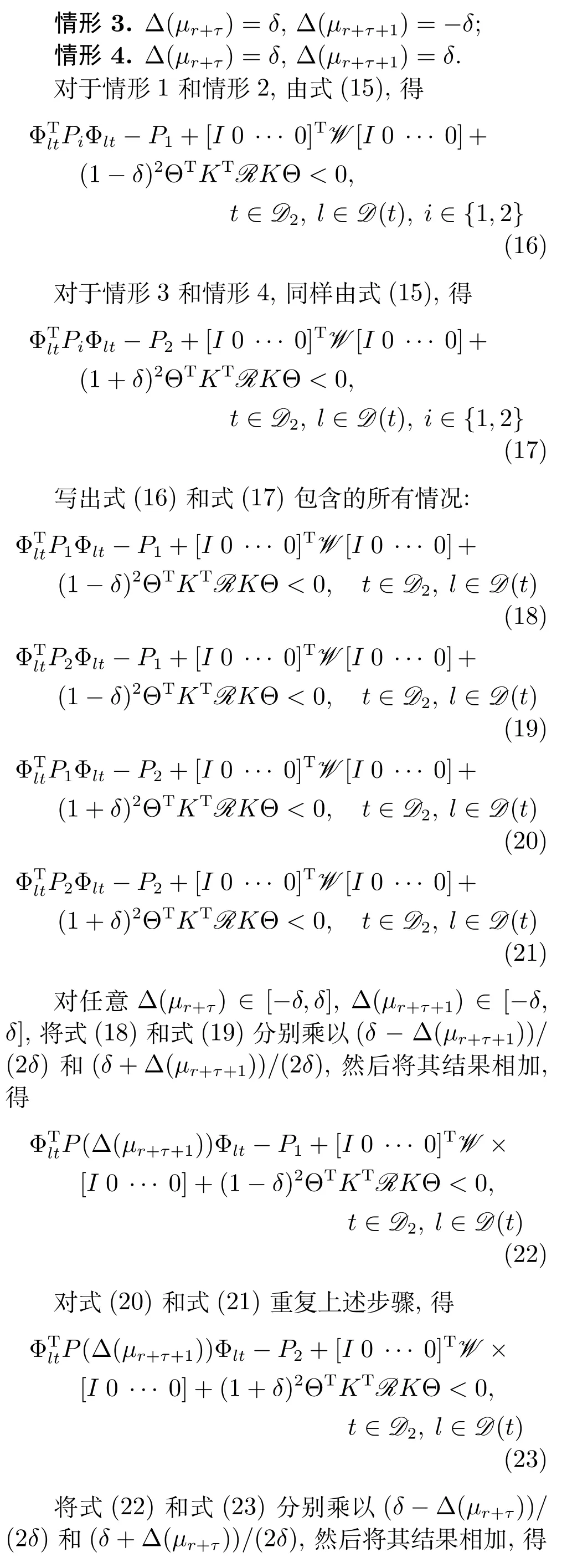
其中,矩阵Pi>0,重复定理1的证明过程,可得
由此,对于任意 Λ(µr+τ)和Λ(µr+τ+1),有
注2.本文所谓保守性更弱的结论主要是针对文献[25]采用的二次型Lyapunov函数而言,即对整个量化误差区间δ]取固定的Lyapunov矩阵P.而本文采用了新的量化依赖Lyapunov函数,,Lyapunov 矩阵依赖于量化误差,即P(∆(µr))=(δ−∆(µr))P1/(2δ)+(δ+ ∆(µr))P2/(2δ),在定理1和定理2中,若取Q1=Q2=P,则本文的结论可退化为文献[25]的结论.由此可知,本文的方法保守性更弱.
3 仿真例子
为验证定理1,考虑如下单输入线性离散时不变系统:

初始状态为x(0)=[0.01 0]T,两个通道丢包上界为d1=d2=3.
为验证定理2,考虑如下多输入线性离散时不变系统:

同样,取初始状态为x(0)=[0.01 0]T,两个通道丢包上界为d1=d2=3.
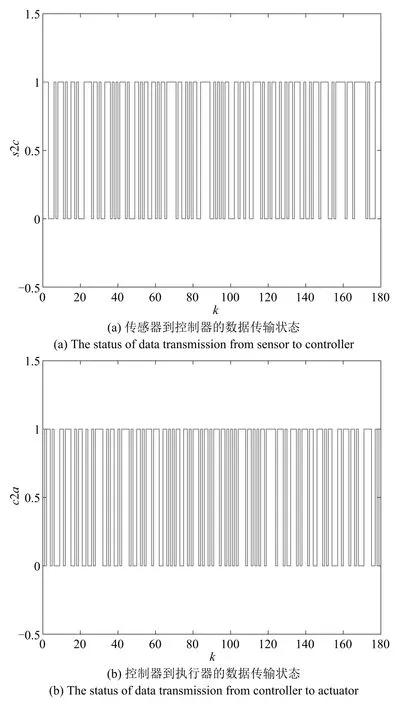
图2 网络环节的数据传输状态Fig.2 The status of data transmission
系统网络数据传输状态如图2所示,其中,s2c=1表示控制器从传感器成功接收到数据,s2c=0则没有收到数据,c2a=1表示执行器从控制器成功接收到数据,c2a=0则没有收到数据.基于定理1和定理2,得到了在不同量化密度下的单输入系统及多输入系统的状态响应和控制输入仿真结果分别如图3和图4所示,并且列出其反馈增益K和性能指标J值如表1.由此证明了本文NCS保成本控制器设计方法的有效性.与文献[25]中二次型Lyapunov函数方法相比,不论是单输入系统还是多输入系统,采用本文的量化依赖Lyapunov函数方法,可以较好地改善控制性能.此外,从仿真实验结果来看,当量化密度取得较小时,即量化器较粗糙,可以得到文献[25]中二次型Lyapunov方法不可行,而本文方法可以正常求解的结论,因此本文方法保守性更弱.
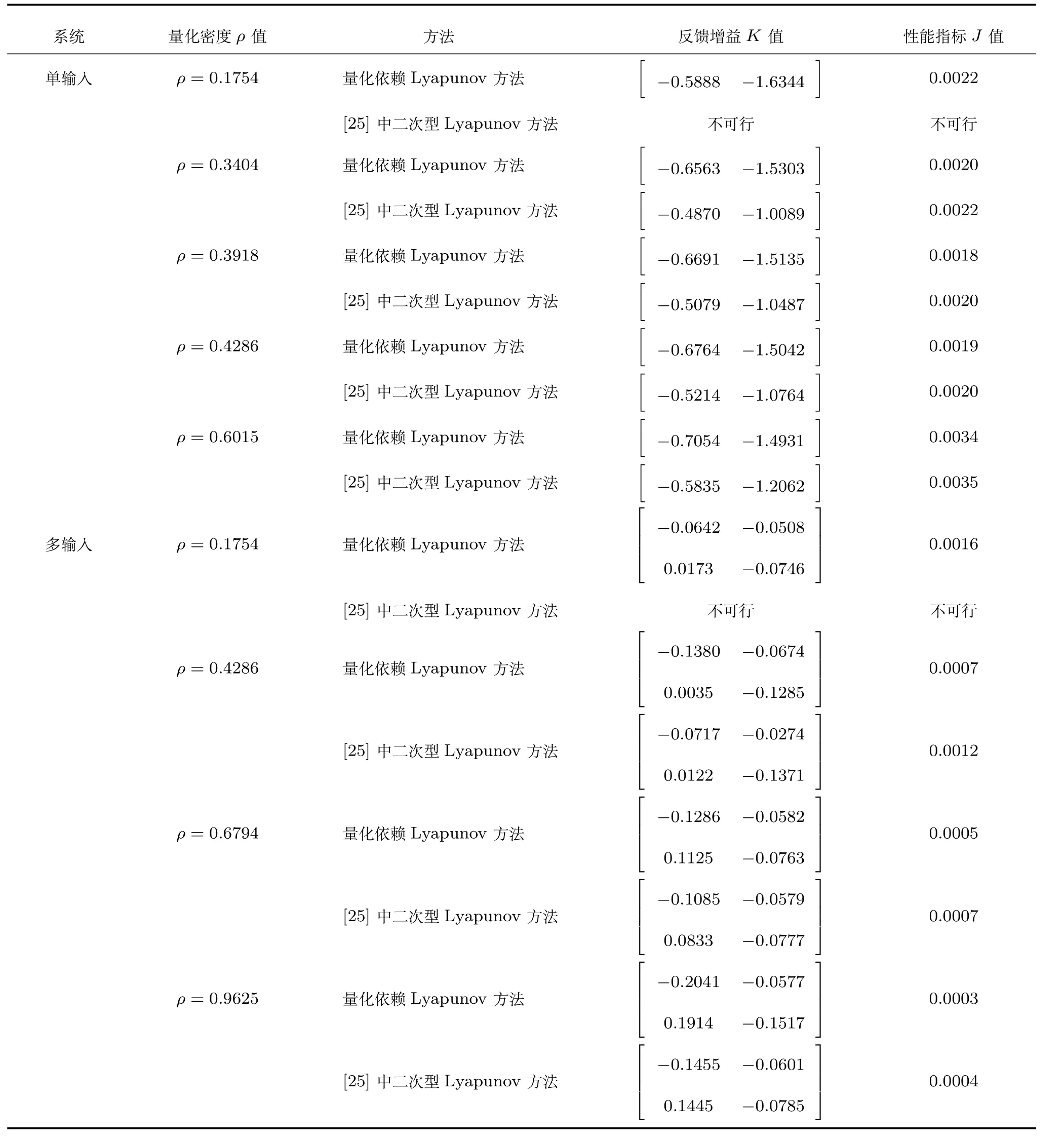
表1 两种Lyapunov函数方法下的反馈增益K及性能指标J对比Table 1 Comparison of feedback gainKand performance indexJvalues using two Lyapunov function methods
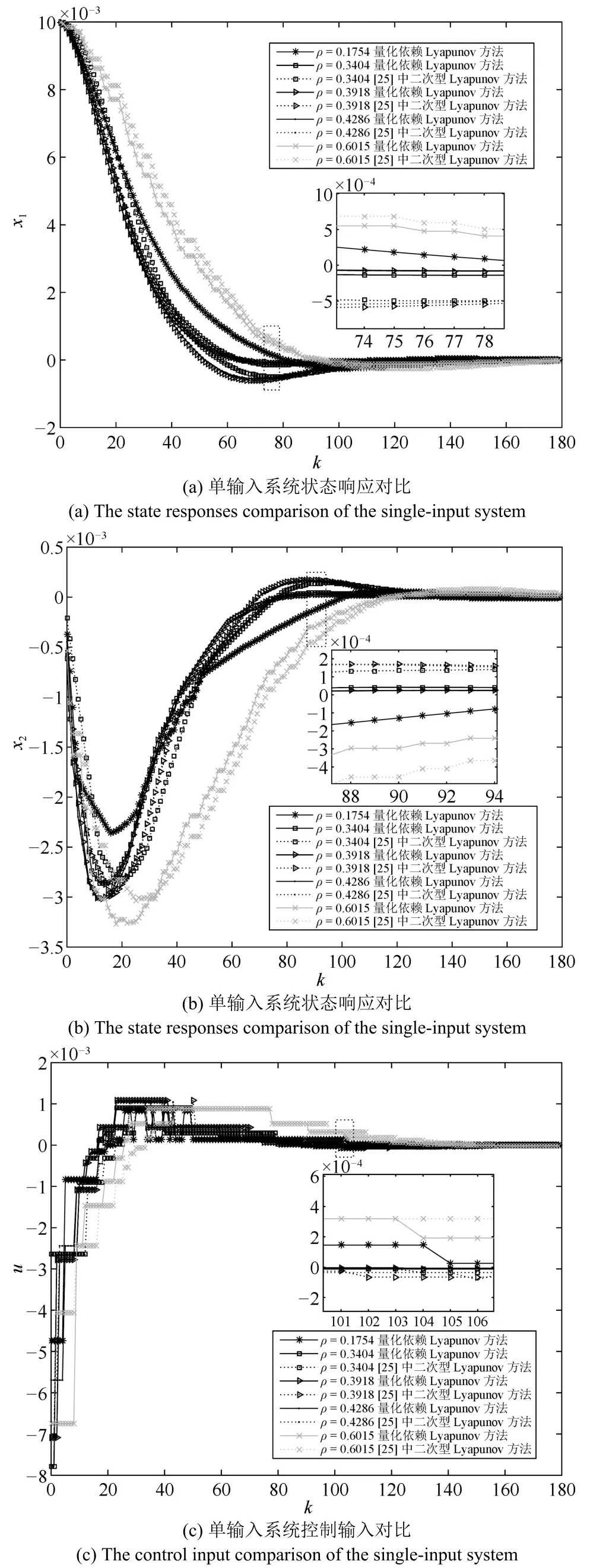
图3 单输入系统状态响应及控制输入Fig.3 The state responses and control input of the single-input system
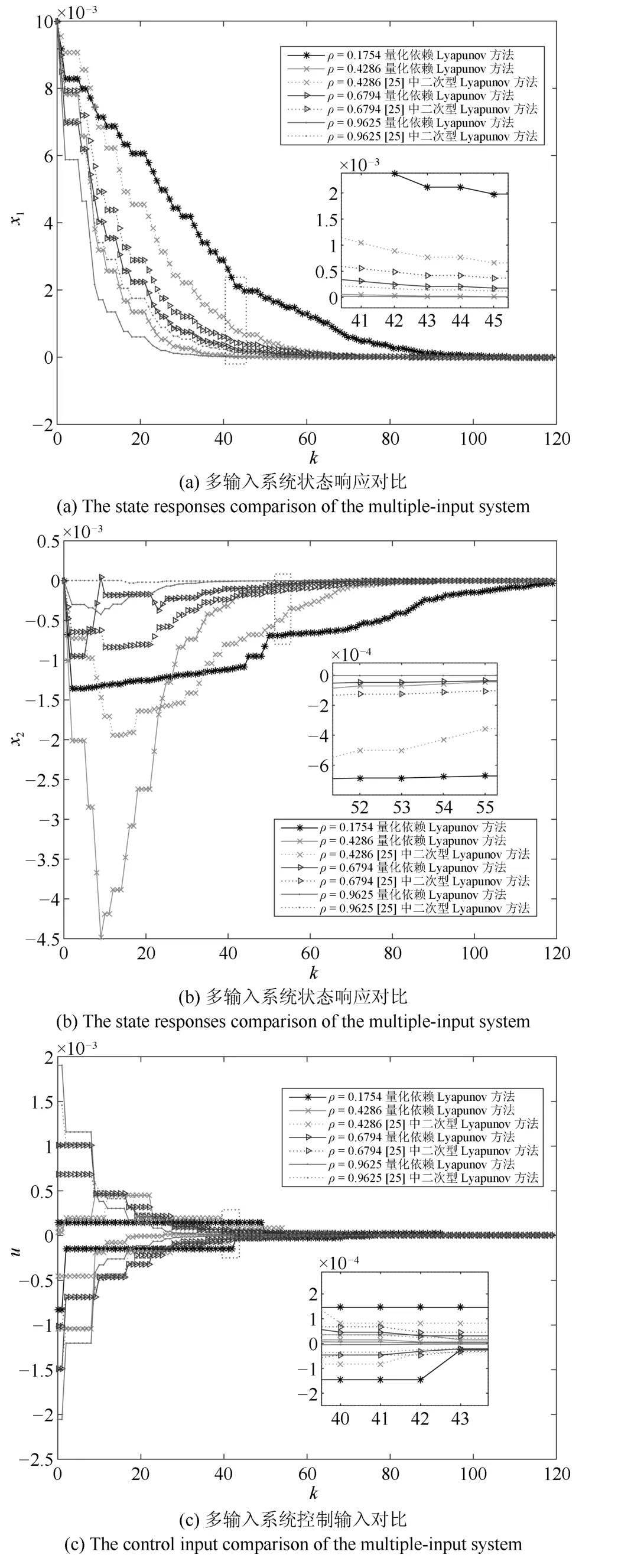
图4 多输入系统状态响应及控制输入Fig.4 The state responses and control input of the multiple-input system
4 结论
本文的主要目标是给出丢包网络系统的保成本控制器设计方法,该方法的关键在于运用量化依赖Lyapunov函数来分析闭环系统的稳定性.本文基于鲁棒控制理论建立了包含对数量化器的网络控制系统数学模型,得到了系统鲁棒稳定的充分条件和保成本控制器.仿真结果证明了设计方法的有效性和合理性,并通过和文献[25]中二次型Lyapunov函数方法的比较,说明了运用量化依赖的Lyapunov函数方法得到的结果保守性更弱.但同时也由于该Lyapunov函数引入了更多的决策变量,使得本文方法付出了更大计算量的代价.
