双目立体视觉在动车车身关键尺寸检测中的应用
2018-10-16高金刚刘智勇侯岱双刘孝峰
高金刚,刘智勇,张 爽,侯岱双,刘孝峰
(1.长春工程学院 机电工程学院,长春 130012; 2.长春工业大学 机械工程学院,长春 130012;3.中车长春轨道客车股份有限公司 工业规划发展部,长春 130012)
0 引言
随着我国交通运输制造业的不断发展,针对其尺寸大、检测项目多、车型变化多等现场检测实际情况,企业往往依靠传统测量工具,如钢直尺、卷尺、盘尺等,所造成的测量精度与综合误差很大,无法满足对动车(China Railway High-speed, CRH)车身关键尺寸形位公差的检测精度要求;而传统固定式三坐标机测量系统、室内定位系统(indoor-Global Position System, i-GPS)检测系统[1]、激光跟踪仪[2]或关节测量臂[3]则由于测量范围小或存在检测盲区所限制,无法完成动车车身关键尺寸在线检测。由于机器视觉等非接触检测技术的发展,国内学者专门研究了立体视觉理论并将该技术运用于大型物体的在线实时测量[3-6],但是实际应用于大型工件的检测时精度不高。
基于以上所存在的现场实际检测难题,本文提出了利用多目立体视觉原理与立体空间球检测技术相结合的检测原理,来检测动车车身关键尺寸,即可以通过构建多个双目立体视觉检测子站,完成对动车车身关键尺寸位置的捕捉与定位,利用激光跟踪仪并结合相关算法,对各个检测子站进行全局标定,进而通过已完成全局标定的各个子站采集实验数据,利用点空间距离公式,求得所需测量的关键尺寸。
1 检测系统系统设计
如图1所示,当前大多数动车制造企业,在动车车身关键尺寸检测上,往往依靠传统的测量工具,如钢直尺、卷尺、游标卡尺等,测量结果精度不佳。为了有效检测动车车身,适应其尺寸大、车型变化多、检测项目多等特点,提出了利用多目立体视觉原理与立体空间球检测技术相结合的检测原理。

图1 动车车身关键尺寸现场检测
如图2所示,为动车车身关键尺寸检测流程。通过建立多个检测单元子站,来达到检测精度要求及目的。
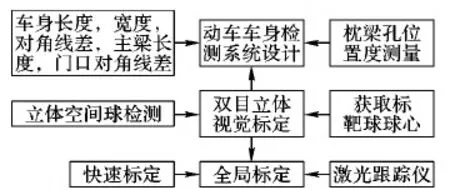
图2 动车车身关键尺寸检测流程
图3为动车整体车身各个关键尺寸的测量机构示意图,图4为各个双目双目电荷耦合装置(Charge Coupled Device, CCD)视觉测量子站、标靶板与激光跟踪仪间关系,其具体检测步骤如下:利用棋盘格标定板对固定于支架上的一组(2只)CCD相机进行内外参数标定,形成双目CCD相机检测子系统。双目CCD相机检测子系统同时拍摄位于公共有效视野内且在固定位置安装有直径为20 mm的3个高精度标准小钢球的标靶板,则这3个小钢球在双目CCD相机检测子系统坐标系下的球心空间坐标信息分别为:A(X1,Y1,Z1),B(X2,Y2,Z2),C(X3,Y3,Z3)该3点在双目CCD相机检测子系统坐标系下确定一个空间平面。再利用激光跟踪仪上的直径为20 mm的标靶球分别替换标靶板上的该3个点位置(A、B、C3点),采集到该3个点相对应于激光跟踪仪系统自身所建立的坐标系为世界坐标系的标靶球球心空间坐标信息分别为A(X1′,Y1′,Z1′),B(X2′,Y2′,Z2′),C(X3′,Y3′,Z3′)也同样确定一个空间平面。利用双目CCD相机检测子系统所采集到小钢球球心空间坐标信息和标靶球球心空间坐标信息,可以获得任意双目CCD相机检测子系统与激光跟踪仪系统自身所建立坐标系的世界坐标系的融合变换矩阵,见式(1):
(1)
其中R变量可以通过改变标靶板的角度,采集若干组点的空间坐标信息来获得。利用融合变换矩阵Hi将双目CCD相机检测子系统坐标系变换至世界坐标系中,同时将双目CCD相机检测子系统坐标系下所采集到的点的空间坐标信息通过融合变换矩阵Hi实时转换到世界坐标系中。同理,利用多个双目CCD相机检测子系统采集获取关键点空间坐标信息,通过相关距离坐标公式得到车身宽度、长度、对角线差、枕梁孔位置度、车身主梁等高、两侧门对角线差等测量模块信息。如检测车身轮廓宽度尺寸测量模块,利用CCD相机1、CCD相机2所组成的第一检测子系统以及CCD相机3、CCD相机4所组成的第二检测子系统,分别利用这两个检测子系统采集并提取位于边梁及端梁处的两个特征点的空间坐标信息,该两点空间坐标信息分别为A(X1,Y1,Z1) ,B(X2,Y2,Z2) ,该两点将通过融合变换矩阵H1和H2实时转换到世界坐标系中的空间坐标分别为 (X1′,Y1′,Z1′) , (X2′,Y2′,Z2′)。
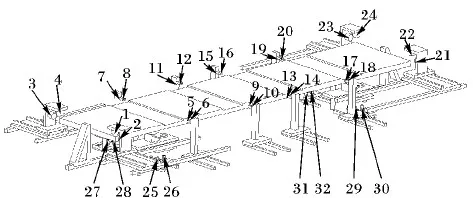
图3 检测系统示意图

图4 双目CCD相机、标靶板与激光跟踪仪间关系
图5为动车车身关键尺寸测量的示意图,包括车身宽度、长度、对角线差测量,枕梁孔位置度测量(长度、宽度和对角线差等),车身主梁等高值及两侧门口对角线差测量等。
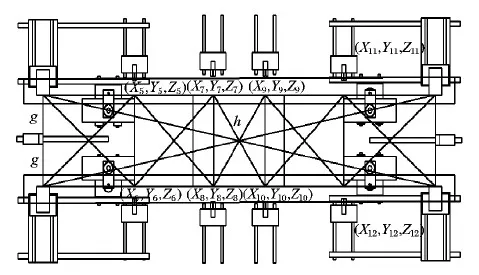
图5 动车车身关键尺寸测量
2 双目立体视觉标定技术
空间球心检测提取是基于双目立体视觉实现的。双目立体视觉是利用了空间前方交汇三角法实现测量的,即通过双目CCD相机所构成的图像平面及目标待测物之间构成一个空间三角形。通过标定板进行CCD相机离线标定,获取两个CCD相机内外参数以及两者之间的空间位姿关系,进而根据球心检测数学模型,推导出目标物体球心的空间坐标位置。
2.1 空间球检测模型
在空间双目立体视觉的三维测量原理基础上[7-8],本系统着重构建一个球心检测数学分析模型,如图6所示,设左侧CCD相机O-xyz位于世界坐标系原点,且没有发生旋转,图像坐标系为O1-X1Y1,有效焦距为f1;右侧CCD相机坐标系为Or-XrYrZr,图像坐标系为Or-XrYr,有效焦距为fr,根据左右CCD相机所标定的内外参数,结合相关算法,便可以求出立体空间球体的球心坐标[9]。
只要确定了空间球球心位置及对应的半径,球体空间位置就可以唯一确定了。双目立体视觉系统中,球面在双目CCD像面上的投影,根据上面原理,可分别确定两个视锥曲面。
如图6所示,两个视锥主轴n、n′的交汇点,构成了球心Pc。设双目CCD相机之间的相对位移为(R,T),则有:
(4)

(5)
式(5)的解为:
(6)
(7)
式(7)为在第1个视点下球心的坐标。根据上面的推导过程,可知球半径的表达式为:
(8)
经式(7)、(8)联立,可得到空间球心位置和半径,便可唯一确定空间球面的位置[10]。

图6 立体球心检测数学模型
2.2 立体空间球检测
立体空间球检测步骤包括了双目立体视觉标定及目标图像球心获取等步骤,具体如下:
如图7所示,本实验采用两台大恒MER-040-60UM/UC型号的工业CCD相机及自制标靶板来进行空间球心坐标的提取。首先分别利用双目CCD对100 mm×100 mm的标定板进行拍摄,如图8所示,至少需要拍摄15组不同位姿的标定板图片,通过相机畸变矫正及相应的图像处理,利用HALCON双目标定程序处理,可得到如表1所示的标定结果。

图7 双目标定架结构
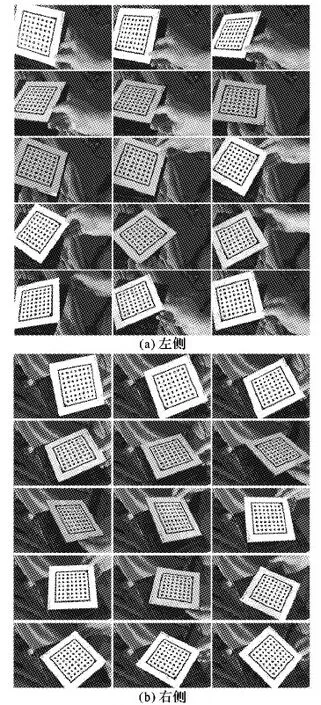
图8 CCD标定板图像
在完成对双目CCD相机参数标定之后,在双目视野允许范围以内的任意位置放置三个标靶球,如图9所示,采集多组标靶球图片。为了避免背景阴影区域及人为因素对本实验结果造成干扰,需将标靶球喷上白漆,借助黑色背景,计算机将自动采集相关图像,使得捕捉到的图片没有阴影区域,便于后期图像处理。如图9所示,通过拍摄若干组球图像,利用空间球检测模型,可以有效获取关键点球心的三维坐标,如表2所示,进而可以求得球心之间距离,即可以通过立体空间球检测技术,在动车车身关键尺寸检测中获取目标点的三维空间坐标,并通过各个子站之间构建全局标定模型,进而求得各个位置度的结果值,实现对动车车身关键尺寸的检测。
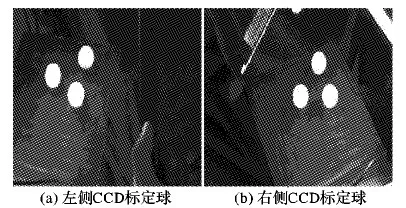
图9 标定球图像获取
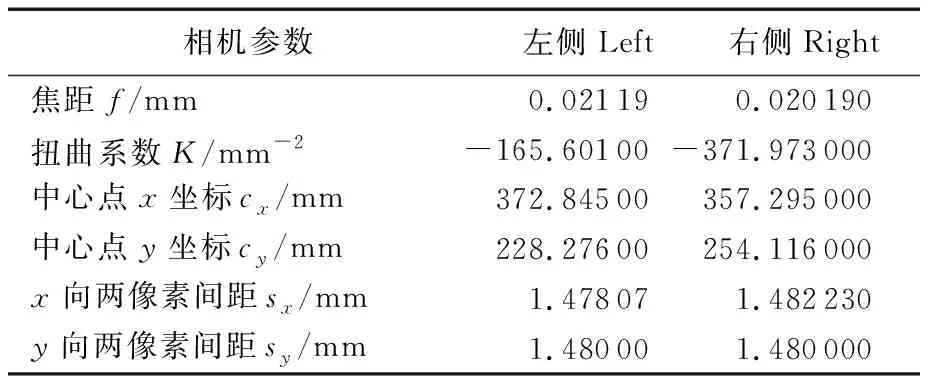
相机参数左侧Left右侧Right焦距f/mm0.021190.020190扭曲系数K/mm-2-165.60100-371.973000中心点x坐标cx/mm372.84500357.295000中心点y坐标cy/mm228.27600254.116000x向两像素间距sx/mm1.478071.482230y向两像素间距sy/mm1.480001.480000
3 误差补偿分析
3.1 神经网络误差补偿模型
小波神经网络,是一种采用小波基函数为神经元的前馈网络模型,它与常用的径向基核函数(Radial Basis Function, RBF)神经网络及BP(Back Propagation)神经网络模型相比,在温差补偿方面,具备了收敛精度可控、收敛速度快、结构可设计等特点。而建立基于小波分析的三层神经网络,即存在单隐含层的小波神经网络模型,可实现对任意复杂非线性函数问题的有效补偿,使得结果更逼近于目标值。具体模型构建思路如下:
根据设计实验,在不同时间、不同温度及光照条件下,连续利用双目视觉,采集百余组实验样本,通过控制相关环境影响变量,来达到实验数据样本的采集目的;而后将这百余组样本数据作为神经网络的输入值,经过模型自身的学习训练,整理出适用于本实验的神经网络模型,即基于小波分析的神经网络模型。其模型原理如图10所示,其中m、n、l分别是对应的输入层、隐含层、输出层的节点个数。xi为输入层的第i(i=1,2,…,m)个输入样本,yq为输出层的第q(q=1,2,…,l)个输出值,wqj为隐含层节点第j个与输出层节点第q个(j=1,2,…,n)之间关系的权值,同样的vji为输入层节点第i个与隐含层节点第j个之间关系的权值,aj和bj则对应于第j个隐含层小波元的伸缩尺度及平移尺度。
小波神经网络的输入输出间关系,如式(9)[11-13]所示:

(9)
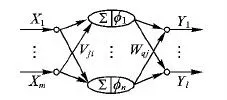
图10 小波神经网络模型结构
为了进一步验证模型现场实际使用时的适应性及鲁棒性,通过对连续若干天时间内,同一个地方不同时刻相同温度下(25℃)进行数据采集,求取该温度下的两个球(球1,球2)之间的立体空间距离,将其平均值设定为目标值,即此温度下的两点之间的距离为46.866 mm。所有测得的实际值,均应通过神经网络误差补偿模型,向目标值逼近。
3.2 神经网络误差补偿分析
为了验证本文所提出的算法的合理性及可行性,以及论证基于小波分析的神经网络误差补偿模型的稳定性及效果,设计了实验进行验证,为此随机抽取若干组不同温度下所测得的双目立体视觉下的值与三坐标测量机下所测得的值,通过神经网络误差补偿模型,进一步降低由于环境变化所带来的影响。将实验影响因素温度、时间、补偿前的两球心距离作为神经网络的输入变量,输入量为补偿后的两球心之间的距离。其温度误差补偿曲线见图11,具体的基于小波分析的神经网络误差补偿结果对比见表2。
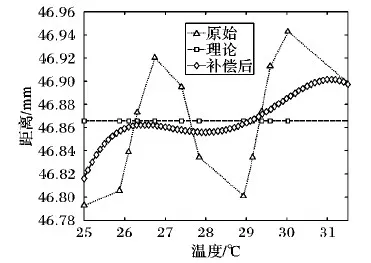
图11 温度误差补偿数据线
如图11所示,数据线1为数据原始线,数据线2为理论线,数据线3为补偿后的线,根据数据线结果可以分析,原始线较理想化线而言,偏差很大,稳定性低,而基于温度的误差补偿模型,则使得结果更偏向于理想化状态下的数据。在表2中,通过三坐标机测得的两球之间的数据为46.866 mm,以此作为标准数据;在不同的时间和温度下,测得的两球之间的距离差值为0.22 mm,这些是由于机构温差变形等系统误差引起的,不可避免。本文中通过基于小波分析的神经网络建立的误差补偿模型,可以有效地对立体空间球心之间的三维距离进行误差补偿,从表2中可看出补偿后距离差值为0.073 8 mm,补偿后距离的精度小于0.05 mm,使得本文的技术方法更贴近现场实际测量要求,增强了现场环境适应性。
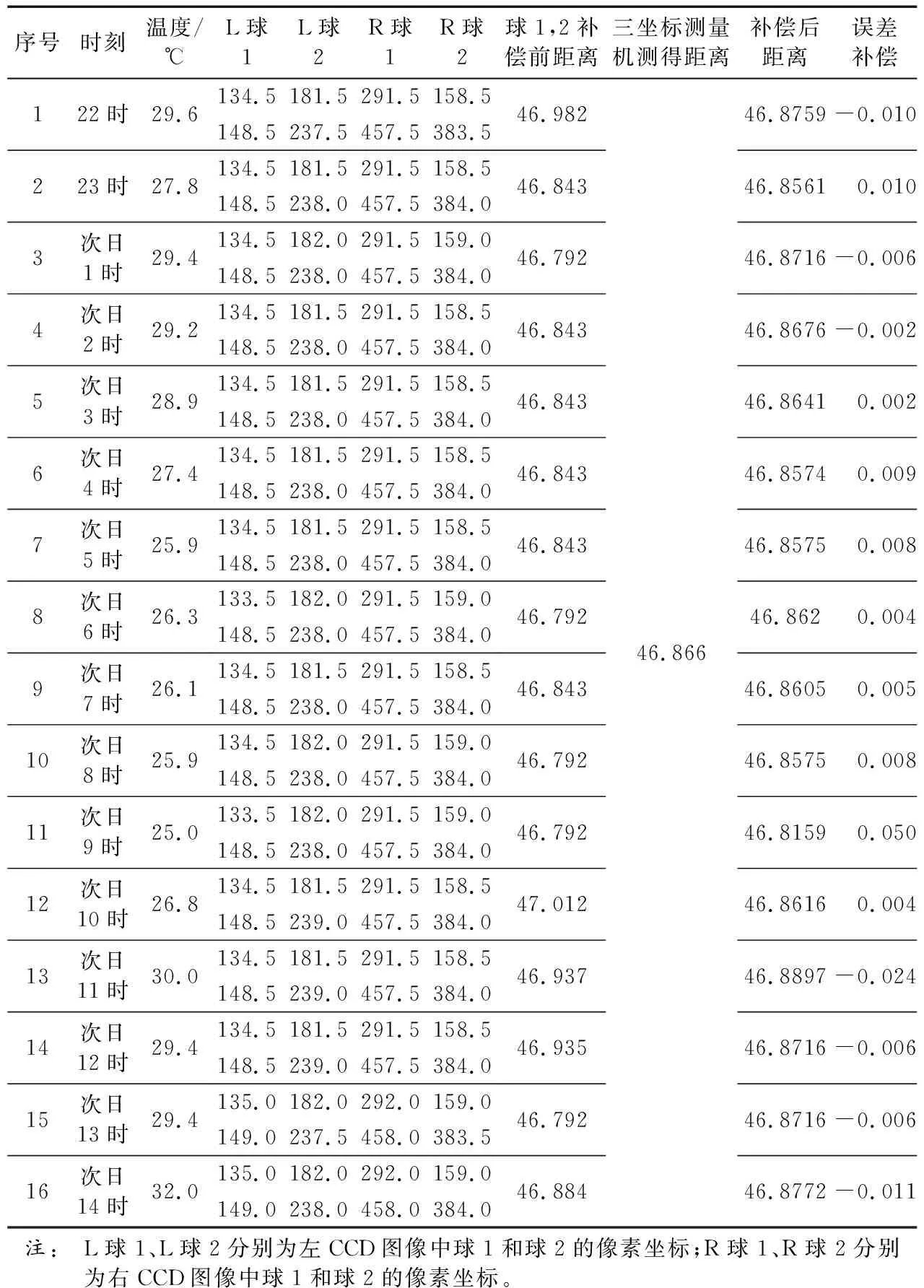
表2 基于小波神经网络误差补偿结果对比
4 结语
提出了大型动车车身关键尺寸的测量方案,利用双目立体视觉进行实验图像采集,其次经过一系列图像处理及两次标定,建立了各个测量子站,同时利用激光跟踪仪及相关算法,完成对各个CCD相机子站的全局标定;各个测量子站利用立体空间球检测技术,对局部关键尺寸进行测量;同时构建了基于小波分析的神经网络温度误差补偿模型,使空间距离补偿后的精度能达到0.05 mm。将本方法与三坐标测量机测得的数据对比验证,该技术方法具有良好的现场适应性,同时通过基于小波分析的神经网络误差补偿分析,提高了测量系统的精确度。
[12] 金靖,张忠钢,王峥,等.基于RBF神经网络的数字闭环光纤陀螺温度误差补偿[J].光学精密工程,2008,16(2):235-240.(JIN J, ZHANG Z G, WANG Z, et al. Temperature error compensation for digital closed-loop fiber optic gyroscope based on RBF neural network [J]. Optics and Precision Engineering, 2008, 16(2): 235-240.)
[13] 孟彦京,汪宁,佟明,等.小波神经网络在压力传感器温度补偿中的应用[J].陕西科技大学学报(自然科学版),2009,27(2):84-87.(MENG Y J, WANG N, TONG M, et al. Application of wavelet neural network in temperature compensation of pressure sensors [J]. Journal of Shaanxi University of Science and Technology (Natural Science Edition), 2009, 27(2): 84-87.)
