基于自适应观测器的四旋翼无人飞行器多传感器故障诊断方法
2018-10-16王日俊曾志强段能全党长营杜文华王俊元
王日俊,白 越,曾志强,段能全,党长营,杜文华,王俊元
(1.中北大学 机械工程学院,太原 030051; 2.中国科学院 长春光学精密机械与物理研究所,长春 130033)
0 引言
四旋翼无人飞行器具有结构简单、稳定性高以及起降灵活等特点,在军事和民用领域得到了极大关注与广泛应用[1-2]。搭载于飞行器上的惯性测量单元(Inertial Measurement Unit, IMU)在其导航信息获取与姿态运动控制中起着至关重要的作用,是保证飞行器安全可靠飞行、执行各类飞行任务的前提[3]。然而,机载环境的温度变化、机械振动等因素的存在使得IMU传感器元件极易损伤或失效,由此导致的传感器故障时有发生[4-5]。传感器一旦发生故障不仅会严重影响飞行的安全性和可靠性,导致飞行任务的失败,甚至会危及地面人员的生命安全,因此对于飞行器传感器故障检测与诊断技术的研究就成为了提高飞行器的安全性和可靠性的迫切任务。
目前大多数应用于四旋翼无人飞行器的故障诊断方法都只涉及执行器故障,而传感器故障检测和隔离(Fault Detection and Isolation, FDI)的研究成果仍然有限[6]。在文献[7]提出传感器故障全局观测器方法之后,相关研究人员逐渐将多种观测器或估计器方法应用于四旋翼无人飞行器的传感器故障检测与隔离的研究工作中,包括基于线性参数变化自适应观测器[8]、集员估计器[9],非线性状态观测器[10]和降阶非线性观测器[11]等。Freddi等[12]采用基于全姿态测量的Thau观测器实现了加速度计偏差故障的检测。在假设四旋翼无人飞行器的平移加速度为零时,Berbra等[13]提出了一种陀螺仪、加速度计和磁力计故障的检测方法。此外,利用卡尔曼滤波(Kalman Filter, KF)方法同时估计四旋翼飞行器状态和传感器偏差,也取得了一定的效果[14-15];然而,对非线性系统参数估计的扩展卡尔曼滤波(Extended Kalman Filter, EKF)或无迹卡尔曼滤波(Unscented Kalman Filter, UKF)的稳定性分析是非常困难的,引入的额外的系统状态变量代表未知的传感器故障参数,使其难以满足有限的传感器测量的可观测条件。
本文针对四旋翼无人飞行器的加速度计和陀螺仪传感器的多故障检测问题,提出一种基于非线性自适应观测器的多传感器故障检测与故障偏差估计方法。该方法利用非线性故障观测器实现多故障的检测与隔离,基于非线性自适应观测器同时对多个未知故障的大小进行估计,从而提高飞行器的容错能力,保证飞行的安全性和可靠性。
1 系统描述
四旋翼无人飞行器的结构如图1所示。
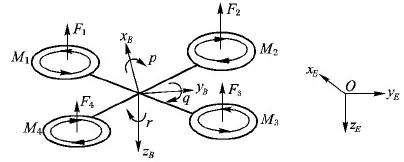
图1 四旋翼无人飞行器的结构
图中,OxByBzB为机体坐标系,原点O取飞行器的质心。OxEyEzE为惯性坐标系,惯性坐标系的原点与飞行器起飞位置时机体坐标系的原点重合。Mi(i=1,2,…,4)为4组由直流电机和旋翼组成的执行机构,其中,M2、M4顺时针旋转,M1、M3逆时针旋转。Fi(i=1,2,…,4)为4个执行机构提供的升力。飞行器通过调整4个旋翼之间的转速差来完成各个方向上的姿态转动控制。
由牛顿-欧拉运动学方程得到的四旋翼无人器动力学模型[16]可描述为:
(1)

(2)
Rη(φ,θ)表示机体坐标系下旋转速度到姿态角的角速度的转换矩阵,且:
(3)
四旋翼无人飞行器通常搭载有成本低、质量轻的微机电系统(Micro-Electro-Mechanical System, MEMS)传感器如3轴陀螺仪、加速度计等作为其惯性测量单元(Inertial Measurement Unit, IMU)。这些传感器在四旋翼无人飞行器的导航信息获取与姿态运动控制中起着至关重要的作用。通常,加速度计与陀螺仪的测量值可表示为:
ya(t)=a(t)+λa(t-ta)ba+na(t)
(4)
yω(t)=ω(t)+λω(t-tω)bω+nω(t)
(5)
其中:ya(t)为实际加速度计测量值,yω(t)为实际陀螺仪测量值,ba为加速度计测量中的故障偏差值,bω为陀螺仪测量中的故障偏差值,na(t)、nω(t)分别为加速度计和陀螺仪的测量噪声。a(t)表示无偏差故障与测量噪声时加速度计测量值,且:
(6)
ta、tω分别为加速度计和陀螺仪故障的发生时刻,λa(t-ta),λω(t-tω)是关于故障时间的阶跃函数,即:
(7)
(8)
在实际的应用中,当加速度计和陀螺仪发生故障后,故障偏差值ba、bω的大小会随时间缓慢地变化,但在短时间内的偏差值的变化量很小[17],因此,在考虑的短时间持续时间内可认为故障偏差值是恒定的。于是有如下假设。
假设1 加速度计和陀螺仪的故障偏差值ba和bω均为有界的常数,即:
(9)
(10)

假设2 在式(4)和(5)中定义的测量噪声na(t)、nω(t)均为有界的零均值信号,且E(na(t))=0,E(nω(t))=0,E(·)为期望算子。
另外,假设惯性坐标系下四旋翼无人飞行器的位置和偏航角可测量得到,则整个系统模型的输出方程可表示为:
yp(t)=pE(t)+dp(t)
(11)
其中:dp(t)为零均值测量噪声,且E(dp(t))=0。
2 多传感器故障检测与诊断系统
将如式(5)和(6)所示的传感器模型代入四旋翼无人飞行器动力学模型有:
(12)
从式(12)可知,加速度计测量中的偏差只出现在表示位置和速度的动力学方程中,而陀螺仪测量中的偏差只出现在表示欧拉角和角速率动力学方程中,因此,传感器测量中的偏差的影响可以被视为虚拟的执行器故障。此外,在四旋翼无人飞行器的状态方程中,两种传感器故障互不影响,相互之间不存在耦合现象。
根据上述分析,本文所设计的四旋翼无人飞行器的多传感器故障检测与诊断系统(Fault Detection and Diagnosis,FDD)系统结构如图2所示。根据FDD系统实现的功能可将结构分为故障检测与隔离FDI和故障偏差值估计(Fault Bias Estimation, FBE)两部分。图中控制器的输出信号与传感器的测量值作为FDI的输入。通常情况下,两个FDI分别用来实现加速度计和陀螺仪测量过程中故障的检测与隔离,一旦其中某一故障被检测到并隔离,便会激活与之对应的FEB完成对故障偏差值的估计,从而增强飞行器控制系统的容错能力,保证飞行器的稳定性与安全性。

图2 多传感器故障检测与诊断系统结构
2.1 传感器的故障观测器设计
2.1.1 加速度计故障观测器
由式(12)可知,四旋翼无人飞行器的质心运动方程可表示为:
(13)

设计如下加速度计故障观测器:
(14)


(15)



(16)

(17)
2.1.2 陀螺仪故障观测器
根据式(12),设计如下陀螺仪故障观测器:
(18)

(19)
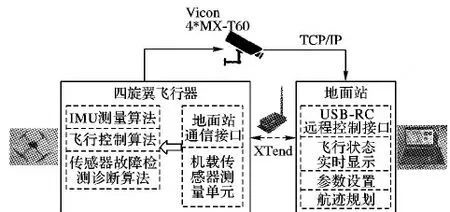
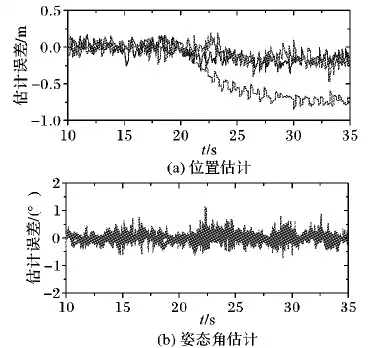
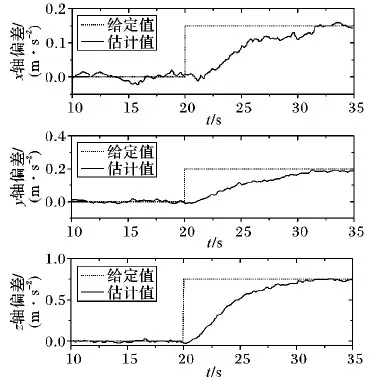
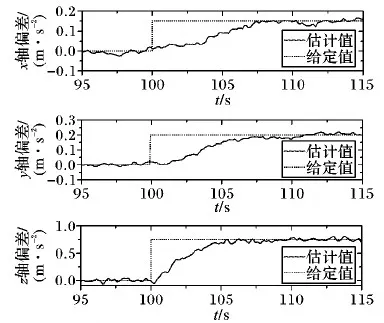
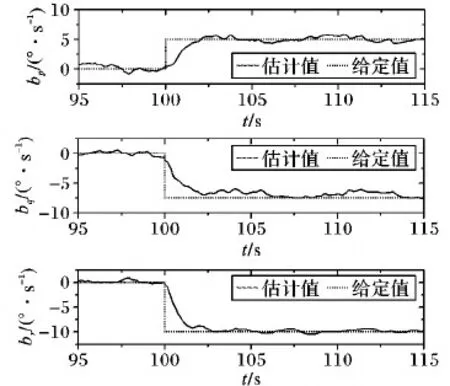
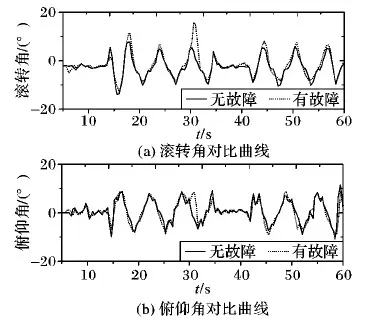
当t hω(t)+eω(t) (20) (21) 2.2.1 加速度计故障偏差观测器 根据式(12),用以估计加速度计故障偏差值的非线性自适应观测器可表示为: (22) (23) 其中Δ是一个对称正定的学习率矩阵。 关于所设计参数自适应律的稳定性存在如下定理。 定理1 假设加速度计传感器发生故障在ta时,在Ta时刻检测到故障,且Ta>ta>0,那么,对于在任意t>Ta时,如果存在常数α1≥α0>0和T0>0,有: (24) (25) (26) (27) (28) 对式(27)进行期望值的计算,结合E(na(t))=0和E(dp(t))=0,可得: (29) (30) 2.2.2 陀螺仪故障偏差观测器 根据式(12),基于Lyapunov方法设计用以估计陀螺仪故障偏差的自适应观测器为: (31) 为了保证参数的收敛性,Rη(φ,θ)需满足如下条件: (32) 证明 如式(31)所示的自适应观测器的状态与参数的估计误差可表示为: (33) 由假设2有,nω有界,则扰动项Rη(φ,θ)nω也有界,显然式(33)中的信号均有界。对式(33)进行期望值的计算,结合E(nω(t))=0,可得: (34) (35) 搭建的室内实验平台系统结构如图3所示。整个系统由课题组研制的四旋翼无人飞行器、Vicon运动捕捉系统以及地面站三部分组成。在飞行过程中,四旋翼无人飞行器的姿态信息和位置信息通过Vicon运动捕捉系统获取,采样频率1 Hz,通过TCP/IP协议实现与地面站的通信。地面站通过XTend远距离射频模块连接四旋翼无人飞行器,实现数据快速可靠的传输与参数的在线调整。 图3 室内实验平台系统结构框图 图4 故障设置时序 图5 加速度计故障检测 图6 加速度计故障偏差估计 图7 陀螺仪故障检测 在检测加速度计和陀螺仪同时发生故障后,对应的偏差观测器对故障偏差值的估计结果分别如图9和图10所示。其中,图9为对加速度计故障偏差的估计结果,图10为对陀螺仪故障偏差的估计结果。可以看出,本文提出的故障诊断方法能够实现对多传感器故障偏差的快速估计与有效跟踪。 图8 陀螺仪故障偏差估计 图9 同时故障时加速度计故障偏差估计 图10 同时故障时陀螺仪故障偏差估计 为了验证多传感器故障条件下飞行器控制的稳定性,设定飞行器的飞行轨迹为矩形,在无故障条件进行飞行,得到的姿态角曲线如图11中的实线所示。在t=30 s时,在加速计和陀螺仪测量过程中引入固定偏差故障,得到有故障条件下的姿态角曲线如图11中的虚线所示。 从图中可以看出,相对于无故障发生时,在30 s的故障发生时姿态角会发生短暂的波动,本文设计的观测器能够检测到故障的发生并将其隔离,之后得到的姿态角与无故障时基本一致,从而保证飞行器的稳定可靠飞行。 图11 同时故障时姿态角对比曲线 构造快速、准确的传感器故障诊断环节是提高四旋翼无人飞行器系统的容错能力,保证其在飞行作业过程中安全飞行的重要基础。本文针对四旋翼无人飞行器多传感器故障的诊断问题,设计了基于自适应观测器的多传感器故障诊断方法。对所提出的诊断方法进行了理论分析,并通过数值仿真和实际飞行验证了所提出方法的有效性。实验结果表明所设计的故障观测器可快速地检测到故障的发生位置,并实现故障隔离。在多传感器发生故障后,自适应故障偏差观测器能够准确估计各传感器故障偏差值,有效地提高了飞行器的可靠性和安全性。





2.2 传感器故障偏差的非线性自适应观测器设计









3 实验研究


3.1 加速度计故障实验

3.2 陀螺仪故障实验



3.3 多传感器故障实验

4 结语
