希尔排序算法优化偏差控制的MMC电容均压模型
2018-10-10付华,于翔
付 华,于 翔
(辽宁工程技术大学电气与控制工程学院,葫芦岛125105)
电压源型换流器VSC(voltage-sourced convert- er)能够独立控制有功功率及无功功率,实现潮流翻转[1-2],适合高压直流输电HVDC(high voltage direct current)系统[3-5]。模块化多电平换流器MMC(modular multilevel converter)继承了电压源型换流器的优势且有开关频率小、波形质量高、易于通过电压均衡控制模型实现均压的优势,克服了现有VSCHVDC拓扑结构存在的开关频率高、损耗大、开关器件动作一致性差的问题,避免了直接串联大量的开关器件,更适用于柔性直流输电领域[6-8]。
目前,对模块化多电平换流器在环流抑制及直流故障穿越等方面开展了广泛研究,其中,子模块均压控制问题是高压直流输电系统稳定运行的关键与难点。MMC均压问题包括:桥臂内子模块电容电压平衡、桥臂间电压平衡和换流器储能控制。而实时采集子模块电容电压信息排序以及应用载波移相调制技术为目前常被采用的两类MMC均压技术。文献[9]采用质因子分解法,通过对子模块分组均压减少了参与均压的子模块数,提出组间电压平衡算法维持组间电压的平衡,使桥臂内子模块电容电压达到平衡的同时,减少控制器的运算量,但当桥臂子模块数量很大时,控制器难以承受巨大的运算量。文献[10]提出模块化多电平变流器的子模块分组调制及均压控制,将各个子模块组视为可控电压源,子模块组之间只存在弱耦合,通过控制子模块组的充放电实现子模块组之间的电容电压平衡,降低了对硬件的速度以及实时性的要求,但由于该算法的核心是在调制波中叠加直流分量和交流分量,其对硬件的速度及实时性要求较高;文献[11]提出一种快速的模块化多电平换流器电压均衡控制模型,基于电容电压平均值比较原理,无需对电容电压进行排序,能够在较低开关频率下实现电压的均衡控制,相比于基于电容电压排序的均衡控制模型计算量小,但由于该算法对所投入的子模块未进行排序,影响了MMC的运行效率;文献[12]采用质因子分解法与希尔排序算法的MMC电容均压模型,基于质因子分解法提出一种优化的混合排序法,引入希尔排序算法大幅度降低排序次数,通过对文献[9]的算法进行优化,从而降低仿真时间及其对系统硬件的要求,但由于该混合算法的核心仍是对电容电压进行排序,当桥臂子模块数量较大时仍会产生很大的运算量,加大控制器的负担。
基于上述问题,为减小因电容电压排序对控制器所造成的负担,提高控制系统的动态响应速度,提出了一种希尔排序算法优化偏差控制的MMC电容均压模型,该模型基于电容电压偏差控制原理,不需要对子模块电容电压进行排序,极大缩减了控制器的运算量,通过希尔排序算法对桥臂处于不同状态时满足相应判定条件的子模块进行排序,按照排列后的顺序依次投入,保证了系统的高效可靠运行,能够在较低开关频率下实现电压的均衡控制,在PSCAD/EMTDC上搭建MMC的仿真模型,验证了所提出的子模块均压控制模型的有效性。
1 MMC的结构与原理
MMC由6个桥臂组成[13-14],图1为MMC结构图及其经典子模块结构。半H桥型子模块HBSM(half-bridge sub-module)结构如图1右侧所示,其中iba为桥臂电流,Uc为电容电压。每个子模块有2个全控型开关,处于正常运行状态时上、下开关互补导通,通过控制开关的触发来控制子模块电容的投入或切除。若任意时刻上下桥臂同时投入的子模块总和为n,则可保持直流侧电压Udc恒定不变,通过对上、下桥臂投入个数进行控制可以跟踪控制系统解调电压,并通过投入以及切除子模块来合成交流侧电压[15]。

图1 MMC结构Fig.1 Structure of MMC
当高压大容量的直流输电中应用MMC时,需串联几十或上百个子模块,其电平数也将达到几十或上百个,此时,谐波问题已不再是主导,通过对其进行阶梯波调制就能够很好地输出高质量的电压波形,其开关次数远远小于脉宽调制PWM(pulse width modulation),可大幅减小开关损耗。当子模块数量较多时,最近电平逼近调制NLM(nearest level modulation)算法具有较大优势,利用最近电平瞬时值来逼近调制波,当电平数较多时能够在较低开关频率下跟踪控制层相电压参考值指令Uf,故主要研究基于NLM的分组阶梯波调制算法。
其基本原理可表示为

式中:round(·)为取与括号内计算量最接近的整数函数;ns、nx分别为上、下桥臂所投入子模块的个数;Uc0为电容电压的额定值。当换流器桥臂控制层收到由最近电平控制算法所得的应投入子模块个数n后,利用电容电压均衡控制模型,选择数目为n的子模块投入运行。
2 偏差控制模型
传统MMC子模块均压控制原理为:按照单一独立桥臂(指所有相的上、下桥臂)上的电流方向与子模块导通数目对子模块的电容电压进行排序[16-17]。如果桥臂电流的方向为电容充电方向,将投入低电压值的子模块,反之,则投入高电压值的子模块。单个桥臂上的子模块之间的电容电压在子模块均压控制算法的持续作用下差别细微,能够实现直流电压的稳定。但传统MMC子模块均压控制模型占用了控制器大量的运算资源使其运算负担大为加重。设计了一种希尔排序算法优化偏差控制的MMC电容均压模型,极大降低了控制器的运算量,缓解了其繁重的负担[16-17]。
由于MMC子模块均压控制并没有要求子模块电容电压值大小完全一致,而是对各子模块电容电压值在额定值附近波动幅度有所要求,故可对电容电压的一致性作合理取舍从而减小全控型器件的开关频率,提高其使寿命[18-19]。
偏差控制进行初始化处理:将当前控制周期内子模块投入数目记为n,上一控制周期子模块投入数目记为npre。其中n值的下限为0,n值的上限为nmax,即n∈[0,nmax]。当n=0时切断桥臂中投入运行的所有子模块;当n=nmax时,将所有的子模块投入运行;如果n值位于上下限值之间,便需要求桥臂中所有子模块电容电压Uc同其平均值Ucavg的偏差ΔUc。设电容电压越界的最大偏差为ΔUcmax,当ΔUc>ΔUcmax或n≠npre时应根据偏差控制对触发脉冲进行重新计算。

图2 偏差控制初始化Fig.2 Initialization of deviation control
3 改进的偏差控制模型
3.1 希尔排序算法
希尔排序算法于1959年由Shell提出,是一种插入排序算法的改进算法[20]。核心思想为:将需要进行比较的全部元素按其下标一定增量的选取分为若干个区域,以达到令某一元素向目标位置大步前进的目的。随着排序过程中下标增量μ的减小,算法最终转化为普通的插入排序算法完成排序过程。所要关注的是,先前用较大下标增量进行排序的有序性不会因较小的下标增量排序而改变。
设给定目标序列的长度为L,则希尔排序算法对其排序的过程如下:首先取一个较大整数作为第一个下标增量 μ1(μ1<L)。所有距离为 μ1倍数的元素被放置在同一组中,并在各个组内先进行插入排序。其次,取一个整数作为第2个下标增量μ2(μ2<μ1<L),重复上述过程,直至所取下标增量 μn使所有元素被放置在同一组中。
设有4个偏差值元素需要被排序,已知ΔUc1>ΔUc2>ΔUc3>ΔUc4,则下标增量 μn分别取为 3、2、1,排序情况如图3所示。
图3中,小箭头所指的两个偏差值元素为下标增量μ取不同值时参与比较的元素,所有距离为μn倍数的元素被放置在同一个组中,只要最终下标增量μn=1,则所有元素会被完全排序。对于大量元素进行排序的情况,文献[13]已证明当选取下标增量为2k-1时(K∈Z),序列被完全排列完成的最大时间复杂度为O(N1.5),此时下标增量μ的取值较为合理。
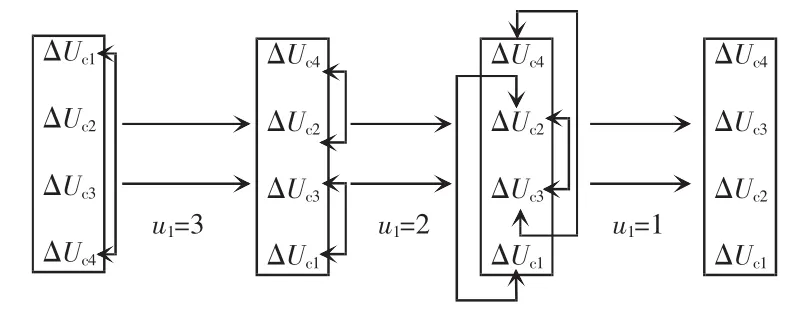
图3 希尔排序算法Fig.3 Shell sorting algorithm
3.2 希尔排序算法优化偏差控制的子模块均压模型
综上可知,基于希尔排序算法优化偏差控制的子模块均压模型如图4所示,具体实现过程如下:
(1)建立子模块序号寄存器Rs,对寄存器中第i个元素进行初始化,即令Rsi=i,设定排序允许电压偏差 ΔUallow。
(2)当桥臂电流iba为0时,保持寄存器Rs内现有子模块次序及开通状态不变。
(3)当桥臂电流iba大于0时,处于充电状态,子模块电容电压基准值为:Udatum=Ucavg+ΔUallow,将Rs记录序号的子模块电容电压与该基准值进行比较。若电容电压小于Udatum(即ΔUc<0),即满足充电状态下优先开放条件,将经希尔排序算法排序后的子模块依次由前向后存入新的寄存器Rs_new中;若电容电压大于Udatum,则将子模块依次反向存入Rs中,直到所有子模块重排完成。
(4)当桥臂电流iba小于0时,处于放电状态,子模块电容电压基准值为:Udatum=Ucavg-ΔUallow,将Rs记录序号的子模块电容电压与该基准值进行比较。若电容电压大于Udatum(即ΔUc>0),即满足放电状态下优先开放条件,将经反向希尔排序算法排序后的子模块依次由前向后存入新的寄存器Rs_new中;若电容电压小于Udatum,则将子模块依次反向存入Rs中,直到所有子模块重排完成。
(5)新排序完成后,依次从新寄存器Rs_new中按照所需开通子模块数目选取子模块进行开通处理。
基于希尔排序算法优化偏差控制的子模块均压模型保证了其投入的子模块尽量满足优先开放条件,通过设置排序允许电压偏差ΔUallow,降低了因微小电压波动所造成的开关频繁动作,同时保证了优先被投入到桥臂中的子模块满足相应条件,即按照偏差值ΔUc由大到小的排列序列中依次选取,保证了系统高效可靠运行。

图4 混合均压控制模型Fig.4 Mixed voltage balancing control model
4 仿真实验
通过在PSCAD/EMTDC上搭建两端MMCHVDC系统模型,对所提的希尔排序算法优化偏差控制的MMC电容均压模型的正确性进行验证。设定单个桥臂上的子模块数为100个,表1给出了模型具体参数设置。
基于传统的按照单一独立桥臂上电流方向与子模块导通数目对子模块电容电压进行排序的MMC子模块均压控制模型进行对比实验。
分别将传统子模块均压控制模型与希尔排序算法优化偏差控制的MMC电容均压模型在所搭建的模块中投入运行,具体的运行形式与单个桥臂排序次数如表2所示。
由表2可知,采用希尔排序算法优化偏差控制的MMC电容均压模型相较于传统方法能大幅减少单个桥臂排序次数,最大程度减少实际仿真时间,提高计算速度,减轻控制系统的运算负担。

表1 MMC-HVDC模型具体参数Tab.1 Specific parameters of MMC-HVDC model

表2 不同子模块均压控制模型排序次数比较Tab.2 Comparison of sorting number between different sub-module voltage balancing control models
图5为2种不同均压控制模型单相子模块工作状态,可以看出,采用希尔排序算法优化偏差控制的MMC电容均压模型能够显著降低子模块的开关频率及IGBT开关过程所造成的开关损耗。
图6为单个桥臂上100个子模块在2种不同均压控制模型下的电容电压波形。可见,无论是希尔排序算法优化偏差控制的MMC电容均压模型还是传统方法,对于子模块电容电压的平衡作用相当,子模块电容电压均能够保持在其额定值附近波动。
图7~图8为分别采用传统方法、希尔排序算法优化偏差控制的MMC电容均压模型的MMC系统特性,二者均采用定直流电压、定交流电压、定有功功率控制的站级控制。由仿真结果可知,采用混合算法的子模块均压控制模型不影响系统的正常运行,其系统特性与采用传统方法运行时几乎一致。

图5 2种不同均压控制模型单相子模块工作状态Fig.5 Single-phase sub-module working state of two different voltage balancing control models
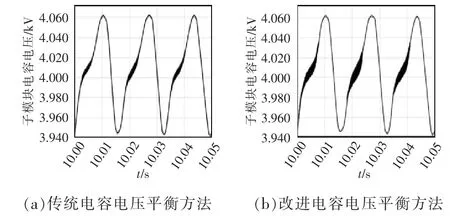
图6 两种不同均压控制模型单相子模块电容电压Fig.6 Capacitor voltage of single-phase sub-module of two different voltage balancing control models
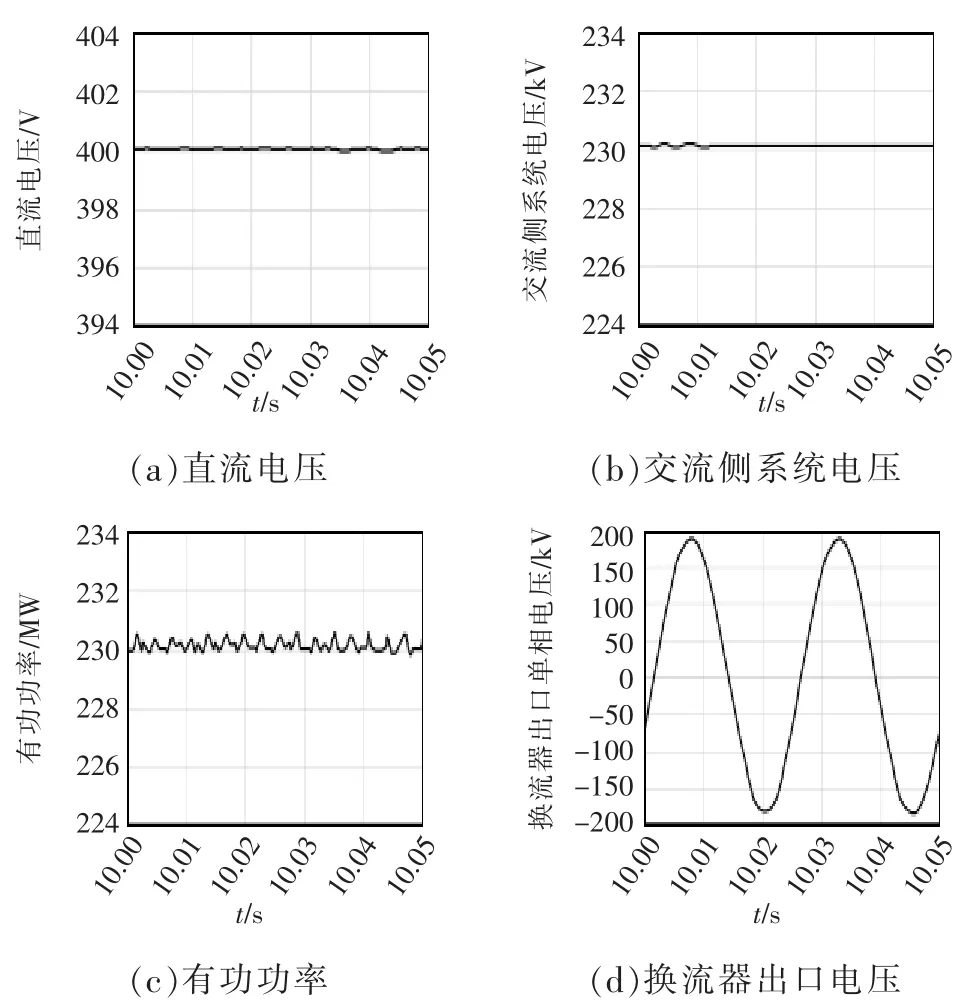
图7 传统方法的MMC系统特性Fig.7 Characteristics of MMC system using the traditional method
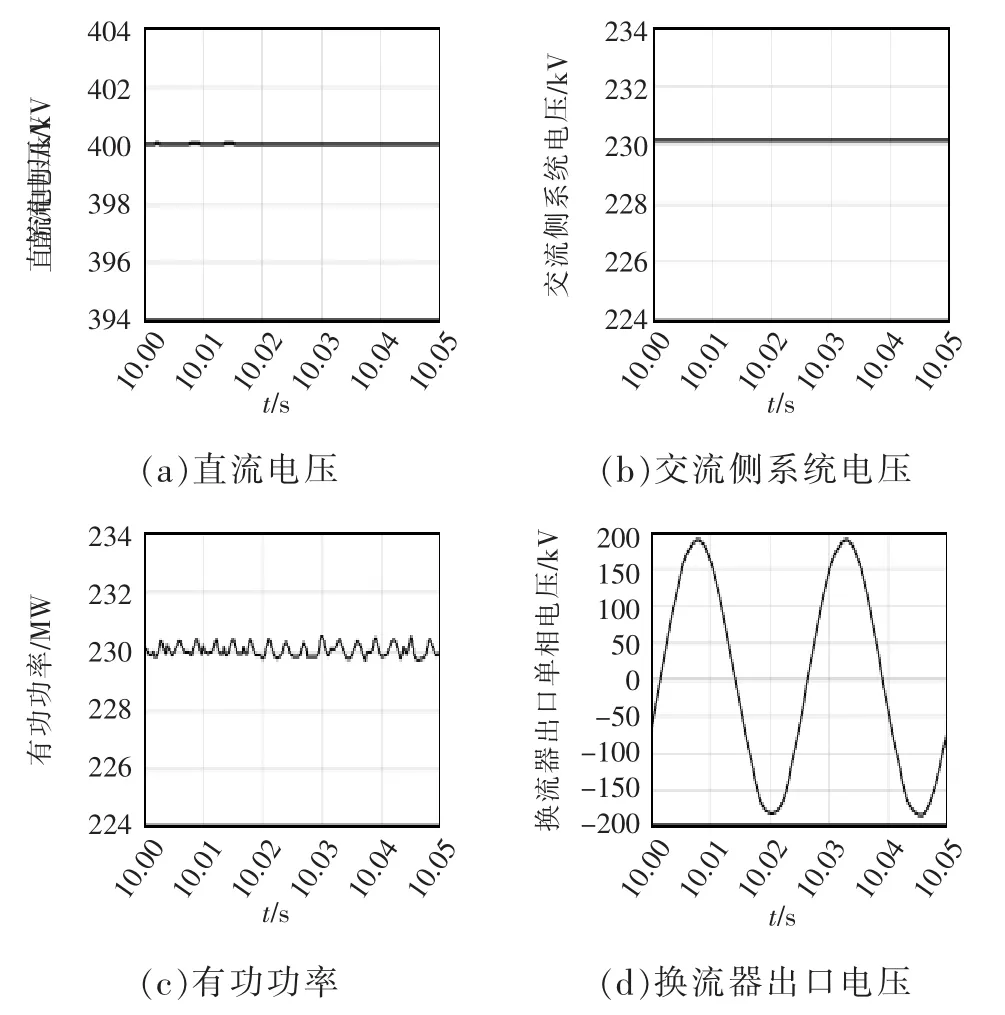
图8 混合算法的MMC系统特性Fig.8 Characteristics of MMC system using the mixed algorithm
5 结论
本文提出一种希尔排序算法优化偏差控制的MMC电容均压模型,在减轻控制器运算负担的前提下,实现子模块均压控制目的。通过在PSCAD/EMTDC上搭建两端MMC-HVDC系统模型,与传统均压控制方法在实际仿真时间、电容电压平衡效果以及系统特性方面进行对比研究,结论以下。
(1)相较于传统均压控制方法,希尔排序算法优化偏差控制的MMC电容均压模型能够明显减少实际仿真时间,提高仿真效率,降低子模块开关频率以及开关损耗。
(2)采用希尔排序算法优化偏差控制的MMC电容均压模型与采用传统均压方法相比在电容电压平衡效果方面基本一致。
(3)采用希尔排序算法优化偏差控制的MMC电容均压模型与传统均压方法相比在子模块电容电压、MMC系统特性衡效果基本相同,对MMC-HVDC的系统特性基本没有影响。
