一种用Excel软件计算盾构姿态的方法
2018-10-10俞靓王斌
俞 靓 王 斌
上海市机械施工集团有限公司 上海 200072
近年来,盾构机掘进隧道的方法在全国各大城市地铁及地下空间发展建设中得到了大规模的应用,盾构机的各类自动化系统也有了长足的进步[1-4]。就盾构机导向系统来说,目前国内外已经有多家公司专门研发的各类自动测量系统。这些自动测量系统经过多个工程的验证,已经能满足日常施工的绝大部分情况。尽管如此,我们还需要在碰到特殊情况的时候使用传统的人工测量系统对自动测量系统所测数据进行复核。本文主要针对用Excel程序计算盾构推进姿态的方法进行研究。
1 盾构推进设计轴线的计算
要想在Excel中实现对盾构姿态的计算,我们必须在所有工作之前将盾构推进轴线的设计三维坐标计算出来。盾构轴线计算主要分为平面曲线和竖直曲线2个部分。
1.1 平面曲线
根据设计图纸,平面曲线主要分为直线、缓和曲线和圆曲线三类。
1.1.1 直线三维坐标的计算
隧道直线三位坐标的计算是通过直线段的起点,结合直线的方位角,利用式(1)计算得出:

式中:x0、y0——直线起点的坐标;
α——直线的方位角;
L——直线上任意一点到直线起点的距离。
利用这个公式,我们就能算出直线上任意一点的平面坐标。目前全国各城市地铁工程中,一环管片的长度基本都统一为1.2 m,我们可以将上式中的L设置为1.2 m的倍数,这样就能算出每一环大里程的平面坐标。
1.1.2 缓和曲线
缓和曲线一般被设置在直线与圆曲线之间,是一个隧道轴线由直线转变为圆曲线的过程阶段。由于地铁隧道的特殊性,设计单位在设计缓和曲线时一般会提供计算时所需的各类参数。
利用这个参数方程,结合缓和曲线通用方程〔式(2)〕,就能计算出缓和曲线上各点坐标。

式中:x1、y1——缓和曲线起点坐标;
β——与缓和曲线连接的直线的方位角;
A、B——根据设计提供的缓和曲线参数方程所计算
出的缓和曲线参数。
同样的,我们以每环1.2 m为间隔计算每环大里程的设计坐标。
1.1.3 圆曲线
要想计算圆曲线上任意一点的三维坐标,我们要先通过图纸上特征点的坐标计算出圆心坐标(图1)。
根据图1,首先从设计图纸上找出缓圆点(xYH,yYH)、圆缓点(xHY,yHY),计算出这两点连线的长度L'和方位角α1。则β可由式(3)计算出:

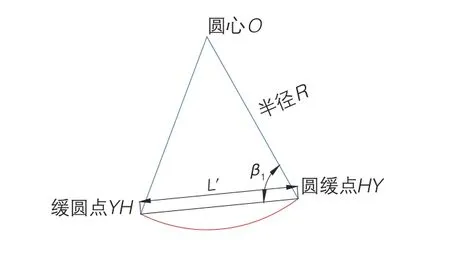
图1 圆曲线示意
利用α1和β1计算出圆心和圆缓点的方位角α2,即得出圆心的坐标〔式(4)〕。

随后计算出圆心O和缓圆点的方位角α3,即可利用式(5)计算出每个里程的平面坐标。

1.2 竖直曲线
根据设计图纸,竖直曲线一般分为直线和圆曲线2种。
1.2.1 直线
直线上各点高程H可用式(6)计算:

式中:H0——直线起点高程。
里程差为所计算任意一点与直线起点的距离,坡度即为设计坡度。
1.2.2 圆曲线
在设计图纸中,一般会提供圆曲线的半径,我们可以通过式(7)进行计算:

式中:H1——圆曲线起点高程;
R' ——圆曲线半径。
坡度为与圆曲线连接的直线的坡度,里程差为所计算任意一点与起点的距离。
这里需要注意的是,上述公式必须由圆曲线与直线的交点作为起算点,计算终点为圆曲线的曲中点。也就是说圆曲线必须分为两段来计算,分别从两段的交点往中间的曲中点计算。上式中的正负号取决于曲线为凸曲线还是凹曲线,凸曲线取负号,凹曲线取正号。
2 人工盾构姿态的测量方法
盾构姿态计算的原理是通过测量两个已知与盾构机相对关系的目标,经过一系列的计算,结合盾构机的俯仰和旋转角度最终得出盾构机与设计轴线的相互关系。为了独立于盾构机的自动测量系统,我们需要在盾构机上安装单独的人工测量目标以及制订一个测量盾构机旋转角度的方法。
2.1 测量目标的安装与定位
首先制作2把长30 cm、宽5 cm的尺,并在上面标注刻度。将这2把尺安装在盾构机尽量靠中央上部的位置,保证与观测吊篮之间有良好的通视条件。2把尺相对盾构机处于不同的高度,前后至少保持2 m的距离。我们把这2把尺称为前尺和后尺。左边刻度用红色油漆标注,右边刻度用黄色油漆标注。一般情况下,我们测量的目标为尺子的中间上边缘的位置,并在这个位置安装反射贴片。在盾构机始发之前,将盾构机视为一个整体,我们必须测出盾构机轴线的三维坐标。测得盾构机三维坐标之后,我们要继续测得之前安装的前、后尺的中间上边缘的三维坐标。
2.2 坡度板的安装
为了方便地测得盾构机的旋转角度和俯仰角度,我们在盾构机上要安装1块坡度板。首先打印一张方格纸,方格纸上绘有1 cm一格的刻度,横纵各有20根。将这张方格纸塑封好。在盾构机上固定一根长1 m的线锤,将方格纸固定在线锤底部,保持1 cm左右间隙。根据盾构机初始的旋转及俯仰角度,将方格纸准确的刻度对准线锤底部安装固定。例如,下坡0.1%、顺时针旋转0.1%,我们就将方格纸纵轴-1、横轴+1的位置对准铅锤底部安装即可。
在得到盾构机初始三维坐标、倾斜及俯仰角度和前后尺的三维坐标之后,我们需要计算出前后尺中心与盾构机中心轴线的相对关系。这里的计算方法与盾构机自动测量系统中观测棱镜或标靶与盾构机相对关系的计算方法一样。在许多文献中也有具体的计算方法,在此不再赘述了。计算结果为前、后尺相对于盾构机中心轴线上下的x前、y前;相对于盾构机中心左右的y前、y后以及相对于盾构机前表面的距离值z前、z后。
2.3 盾构机姿态人工测量
同自动测量一样,我们需要在测站吊篮上对安装在盾构机上的前后尺进行测量。测量的方法为利用全站仪测量前后尺中央上边缘位置,得出水平角、垂直角、平距及高差4个数据。
3 利用Excel计算盾构姿态
3.1 人工计算盾构姿态的原理
人工计算盾构姿态的原理为通过测量前面所述的前后尺并结合盾构机俯仰角及旋转角,根据测尺相对于盾构机的关系,通过一些列的计算得出盾构机的姿态。
3.2 利用Excel计算人工姿态的方法
基于盾构轴线设计坐标,结合测尺与盾构机的关系,利用Excel程序计算盾构姿态(图2)。
其中,我们需要输入的数据就是环号、前后尺水平角和垂直角读数以及回转角,即上表中B4~B8格中的数据。同时还需要输入测站三维坐标及后视坐标。角度我们一般按度分秒的格式填入表中,计算时要把所有度分秒格式的角度转化为弧度。以其中B4格为例,C4格即为B4格中的数据转化为弧度后的数据,在相应单元格输入"C4=(INT(B4)+INT((B4-INT(B4))*100)/60+(B4*10000-INT(B4)*10000-INT((B4-INT(B4))*100)*100)/3600)*PI()/180"。

图2 盾构姿态计算程序界面
在计算程序的第10行至第13行是计算盾构姿态需要的一些参数,包括前后尺至仪器的距离、仪器架设在测站上对后视置零后所观测前后尺的理论角度以及盾构机切口和盾尾中心的设计高程。通过前后尺的理论测量水平角度和实际测量水平角度之间的差值和前后尺至仪器之间的距离,我们可以计算出前后尺的水平偏差;通过仪器高程及前后尺实际测量垂直角度,我们可以得出前后尺的绝对高程数值。分别在相应单元格输入"前尺水平偏差=TAN(C6-F10)*B10*1000-TAN(C8)*H前""后尺水平偏差=TAN(C7-F12)*B11*1000-TAN(C8)*H后""前尺高程=(E4+E5/1000+TAN(90*PI()/180-C4)*B11-H前*COS(C8/180*PI())""后尺高程=(E4+E5/1000+TAN(90*PI()/180-C5)*B11-H后*COS(C8/180*PI())",H前、H后分别代表前后尺距离盾构机中心轴线在竖直方向上的长度。
表中E10、E12需要考虑前后尺的偏移量。以前尺为例,在相应单元格中输入"E10=(ATAN2((VLOOKUP(B3,前尺坐标!1:65536,3,FALSE)-I6),(VLOOKUP(B3,前尺坐标!1:65536,4,FALSE)-J6))-ATAN2((I7-I6),(J7-J6))+ASIN (前尺偏移量/B10))*180/PI()+360",前尺偏移量若为偏右则为正,偏左即为负。
至此,我们已经有了计算盾构机姿态所需要的所有数据。在B17、E17格中,我们就能计算出盾尾、盾首平面偏差,分别在单元格中输入"B17=TAN(C7-F12)*B11*1000-TAN(C8)*H后+(TAN(C6-F10)*B10*1000-TAN(C8)*H前-(TAN(C7-F12)*B11*1000-TAN(C8)*H后))*后尺到盾尾的距离/前后尺之间的距离+E8""E17=TAN(C6-F10)*B10*1000-TAN(C8)*H前-(TAN(C7-F12)*B11*1000-TAN(C8)*H后-(TAN(C6-F10)*B10*1000-TAN(C8)*H前))*前尺到盾首的距离/前后尺之间的距离+E7"。
在B18、E18格中,我们能计算出盾首、盾尾的实测高程,分别在单元格中输入"B18=(E4+E5/1000+TAN(90*PI()/180-C5)*B11-H后*COS(C8/180*PI())+(E4+E5/1000+TAN(90*PI()/180-C4)*B10-H前*COS(C8/180*PI())-(E4+E5/1000+TAN(90*PI()/180-C5)*B11-H后*COS(C8/180*PI())))*后尺到盾尾的距离/前后尺之间的距离)*1000""E18=(E4+E5/1000+TAN(90*PI()/180-C4)*B10-H前*COS(C8/180*PI())-(E4+E5/1000+TAN(90*PI()/180-C5)*B11-H后*COS(B8/180*PI())-(E4+E5/1000+TAN(90*PI()/180-C4)*B10-H前*COS(C8/180*PI())))*前尺到盾首的距离/前后尺之间的距离)*1000"。
从而可以通过在单元格中输入相应公式"B19=B18-B13""E19=E18-B12"算出盾首、盾尾高程偏差。
在整个输入数据中需要注意,Excel对与角度秒数为0的情况下会出现错误。所以我们在输入角度的时候如果碰到0 s需要手动加上1 s。为了显示方便,我们所有公式中的数据都以毫米为单位[5-8]。
4 结语
在自动测量系统百花争艳的当下,人工测量计算程序的计算需要更加简便,以便在特殊情况下能立即使用,不需要更换设备,不需要增加过多的操作及繁琐的计算。利用上面介绍的计算程序,我们就可以轻松地实现人工测量操作。
