基于PMCL方法的大规模无线传感器网络移动定位机制*
2018-09-27吕春峰朱建平陶正苏
吕春峰, 朱建平, 陶正苏
(1.上海海洋大学 工程学院,上海 201306; 2.上海交通大学 电子信息与电气工程学院,上海 200240)
0 引 言
目前,对移动节点定位的方法基本都是基于序列蒙特卡洛(sequential Monte Carlo,SMC)机制[1,2],即利用带权重的样本集描述状态量的概率分布,用MC方法来实现递推是一种鲁棒、有效的非线性次优预估方法,近十年来受到了广泛关注。而大量的样本优化更新运算导致算法运行效率低是SMC机制主要的不足。
本文将针对传统的SMC定位机制迭代次数较多、样本数量易衰减、观测值多样性差等缺点,首先,结合隐藏终端耦合(hidden terminal coupling,HTC)传输机制,提出了群蒙特卡洛定位(population Monte Carlo localization,PMCL)方法:1)采用两重限制手段降低迭代次数;2)采用蒙特卡洛群对重采样进行精确匹配。基于节点密度λ、锚节点分布比例γ、样本数量N、最大移动速度vmax等参数,对PMCL机制进行理论分析和实验仿真。PMCL机制与其他的基于SMC机制的移动定位机制进行性能比较。
1 SMC定位机制缺点
基于SMC机制的移动定位机制,普遍存在几个问题:1)初始样本随机选取,没有任何限制,需要更多次的迭代以获取足够数量的有效样本,效率低;2)通过一重权重迭代,大幅降低样本的多样性,降低了目标位置的准确性;3)样本或者观测值在经过多次迭代之后,过滤后的样本数量不足,导致样本退化。
2 PMCL机制
PMCL机制的核心思想是采用一组权重样本描述目标的后验概率分布,并采用重采样机制(两重)保证样本的多样性和降低样本衰减,将其用于定位,有其显著的优点。
1)初始化阶段
在初始化阶段,时间分成离散的时隙。所有锚节点通过全球定位系统(global positioning system,GPS)获取其位置信息,并执行HTC机制[3],通过发送HTC请求包传递位置信息和其所有的隐藏终端链(hidden terminal link,HTL)上的节点,包括其他锚节点和普通节点。所有节点包括锚节点都获取其HTLs和HTCs,作为候选样本。1-hop,2-hop节点(包括锚节点)的邻居S1-hop和S2-hop分别表示为

(1)
式中l为未知节点与其HTL上的锚节点之间的距离,未知节点的初始位置在候选样本中选取。
2)采样与预测阶段(一重限制)

(2)

图1 PMCL机制选取样本初始化(第一重限制)


(3)
(4)
先验概率p0(lt)为
(5)

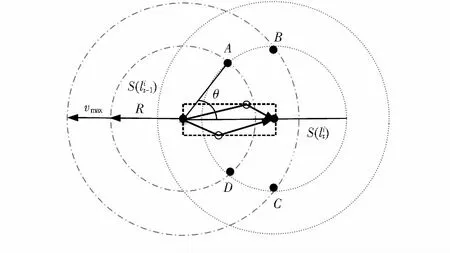
图2 采样和预测阶段(第二重限制)
(6)
3)权重计算与重采样阶段
(7)
采样迭代计算产生样本均可用于构造目标全局预测
(8)
通过对这N个独立的自适应参数进行重采样机制为
(9)
(10)
(11)
4)位置计算
节点通过其新的可能位置和新的观测量,可以计算其下一时刻的位置
(12)
3 实验验证
3.1 性能验证
通过NS-2仿真软件来验证PMCL机制的性能。搭建仿真平台:所有节点包含锚节点均分布在同一个边长1 km的正方形区域内;假设所有在传输距离内的传输节点都能侦听到其他节点的传送;没有信号衰减。设定HTC机制参数为:重传次数为2,最大退避次数为4,数据包长为5个时隙单位。由式(12)可知,位置的误差取决于锚节点的密度γ、样本数量N、节点密度λ,移动速度vmax等参数,基于这几个参数验证PMCL的性能,如图3所示。

图3 定位误差与节点密度关系
可以看出,节点定位误差随着节点密度的增加而减小,且随着锚节点数量的增加,误差也会减小。随着样本数量增加,其重采样重要性权重会更加精确,多样性也增加,但其迭代次数会增加,导致定位延时增加。
同理,定位延时性能也跟γ、样本数量N、节点密度λ等参数有较大关系,如图4所示。随着节点数量的增加,延时先平稳降低,直到λ>0.04,节点数量较多,传递数据包发生冲突的概率增加,传输定位延时增加。

图4 定位时延与节点密度关系
3.2 性能比较
PMCL机制与基于SMC机制的定位算法的蒙特卡洛定位(MCL)机制[4]、移动WSNs的MCL(MCB)机制[5]、WMCL机制[6]、基于约束规则的MCL(COMCL)机制[8]、USML[8]等进行性能比较。
PMCL机制是提高定位响应速度的机制,在初始阶段就限定了采样的区域,并在重采样阶段再一次限定观测区域,提高了迭代效率,因此,定位延时性能要优于其他机制;而其采样及观测的区域都选定在信号包低冲突率的区域,提高了定位的精度,特别是节点规模较大、锚节点密度较小的情况,如图5。

图5 几种定位机制的锚节点密度性能影响
节点移动速度对性能也有较大影响,从图6中看出,PMCL机制对移动速度的响应不理想,只有在低速情况下,其定位误差和实时性有优势。

图6 几种定位机制的节点移动速度性能影响
4 结束语
提出了精度高、时延小的PMCL方法。从实验结果表明:PMCL机制在移动速度小、大规模分布的无线传感器网络中,提高了定位精度,改善了时延性能,为实时在线监控系统应用提供了保证。
