MEMS/GMR集成磁传感器的磁滞抑制方法*
2018-09-27吕云飞潘孟春胡佳飞陈棣湘田武刚周继昆
吕云飞, 潘孟春, 胡佳飞, 陈棣湘, 田武刚, 周继昆
(1.国防科学技术大学 仪器科学与技术系,湖南 长沙 410073;2.中国工程物理研究院 总体所,四川 绵阳 621900)
0 引 言

理论上,磁滞通常源于磁畴的相互作用,材料的不均匀性或由碰撞、位移、杂质等因素引起的内部旋转摩擦力[8]。因此,消除磁滞的方法主要包括结构优化[9~14]、工艺改进[15]、磁滞建模[8]和脉冲磁化[7,16~19]等,其中脉冲磁化是一种通过施加饱和磁场增强磁矩一致性,从而减小磁滞方法[16~19]。Liu S[17]提出了一种基于负向饱和磁化的单向磁场测量方法,由于多层膜型GMR磁敏感体的输出无极性,因此上述方法无法解决双向磁场测量的问题。Xie F[7,18]采用集成线圈和脉冲磁场控制实现了近20 %的磁滞抑制效果,该方法需要将MR元件与补偿线圈进行集成制造,系统复杂而且不能有效避免响应转折区。
由于调制引起的周期性的空间磁场扰动,使得MEMS/GMR集成磁传感器中MR敏感元件探测的为交流磁场而非直流磁场,这使得磁滞建模将更加复杂,因此脉冲磁化是一种较好的降低磁滞手段。与传统的脉冲磁化方法不同,本文提出了一种基于集成MEMS线圈的双向脉冲磁化方法,利用双向脉冲后传感器的响应曲线的差别可实现双向磁场测量,并且避免响应转折区。
1 脉冲磁化原理
本文所使用的传感器原理样机是基于磁聚集和垂动调制原理,其原理和制造过程可参考文献[6,20,21]。如图1所示,通过一对磁聚集器实现磁力线聚集和垂动调制,其中软磁调制膜(FMF)在气隙上方并由垂动MEMS谐振器驱动[21,22]。基于MEMS工艺在MR元件底部制造平面线圈,集成MEMS线圈的有限元仿真结果和显微光学图可参考文献[16]。样机中MR元件是由NVE公司制造的敏感体AAH002。软磁调制膜上下运动以实现MR元件敏感的气隙中磁场调制。当调制膜接近气隙时(图1(a)),磁力线优先通过调制膜,气隙中的磁场强度迅速下降;反之,当调制膜远离气隙时(图1(b)),磁力线将直接通过气隙,MR元件敏感的磁场恢复到初始状态。
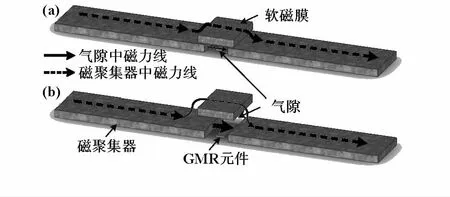
图1 垂动调制下的磁力线分布
单个MR元件和调制MR传感器之间最大的区别是后者所感知的磁场是交流磁场而非静态磁场。将交流磁场使得磁传感器在静态响应曲线上经历的环路称为工作环,因此,在MEMS/GMR集成磁传感器中,工作环的上下端点之间的差值(端点差)即代表被测磁场的大小(峰峰值)。如图2所示,若不磁化,工作环的上端点受历史测量路径影响可处于区域A的任何位置,从而导致被测量工作环曲线不稳定。因此,在实际测量过程中,固定的工作环路是实现磁滞降低的重要途径。而通过脉冲磁化可使得被测环路固定,从而使得磁滞减小。在MEMS/GMR集成磁传感器中,矫顽场会导致上升磁滞回路中存在响应转折区,如图2所示。在这个区域内,工作环端点差与被测磁场之间不单调,导致响应曲线存在局部峰值,因此,工作时应尽量避免该区域。受上升和下降磁滞曲线的斜率影响,当被测磁场为正向时,正向磁化后的工作环端点差比负向磁化后的更大,即输出更大。同理,当测量负向磁场时,负向磁化后的端点差比正向磁化后的更大。可见,双向磁化后的响应差异可用于确定被测磁场方向。

图2 MEMS/GMR集成磁传感器工作原理
为了提高测量精度并实现双极性测量,本文提出了双向脉冲磁化方法,其基本原理图如图3所示,通过综合信息处理模块产生双向脉冲电流,施加到MEMS微线圈上,并产生两个方向的脉冲磁场饱和磁敏感体,分别测量脉冲磁场后磁敏感体的输出大小并进行比较,其中输出大小可采用经典的数字锁相放大或者参考文献[23]中的参数估算法来解算正负脉冲磁化后的GMR输出电压峰峰值,从而判断外磁场方向,并可大幅降低磁滞,避免工作在灵敏度转折区。

图3 双向脉冲磁化基本原理
双向脉冲磁化的电流时序如图4所示,测量磁化结束后正向响应电压(Up)和负向响应电压(Un),如果Up>Un,则测量中应该选择正向磁化饱和,并工作在正向下降主分支。相反,如果Up 图4 电流时序(Up>Un情况下) 将亥姆霍兹线圈和传感器样机放置在3层磁屏蔽筒中,以消除环境扰动。通过控制电流精确控制亥姆霍兹线圈产生-5~5 Gs的可调磁场。AAH002敏感体采用5.0 V直流供电,在PZT悬臂梁两端施加频率为谐振频率,峰峰值为20 V的方波驱动,采用KEITHLEY2010测得集成MEMS线圈的电阻值约为9 Ω,MEMS微补偿线圈的励磁系数达4 000 nT/mA,如图5所示。由于AAH002的饱和场为6 Gs,因此,脉冲电流大小为300 mA时,在磁敏感体上可产生12 Gs的磁场,足以完成饱和磁化。 图5 微线圈励磁系数结果 图6给出了脉冲磁化前后的传感器样机响应曲线,可以发现磁滞大幅降低,基于双向脉冲磁化后的响应差可实现矢量磁场测量。图中正向磁化和负向磁化时,当磁化方向与被测磁场方向相反时,存在明显的灵敏度转折区。 图6 传感器样机磁化前后曲线 将所研制的传感器样机在-5~5 Gs范围内进行测试,响应曲线如图7所示。结果表明:在(0.8~2.4 Gs)线性范围内,传感器样机的磁滞从15 %降至1.3 %,灵敏度从27.8 mV/Gs提高到32.1 mV/Gs。可见双向脉冲磁化方法对磁滞抑制效果显著。 图7 采用双向脉冲磁化后响应曲线 本文提出了一种双向脉冲磁化方法,用于固定磁敏感体的工作环路,可消除历史测量和磁化状态差异所引起的磁滞误差,利用双向磁化后的响应差异来区分被测磁场方向,并选择合理的磁滞曲线分支避免工作在响应转折区。实验结果表明:MEMS/GMR集成磁传感器的磁滞从15 %降低到1.3 %且灵敏度提升了15.4 %。此外,该方法还可以直接应用于抑制其他类型磁传感器的磁滞抑制。
2 实 验



3 结 论
