基于蒙皮的大飞机自动制孔连接化技术
2018-09-19韩志仁
韩志仁,姜 升
(沈阳航空航天大学 航空宇航学院,沈阳 110136)
大飞机的发展是我国的重要战略举措之一,在军事、政治、经济领域都起到了举足轻重的作用[1]。我国是在智能化、数字化大力推进和发展的背景下开始发展大飞机,基本摒弃了传统的设计制造模式,采用数字化设计制造模式研制大飞机。目前,智能化、数字化技术在大飞机上应用尚处于不断解决问题、不断提高水平的阶段,有很多关键技术需要突破提高,其中大飞机机身、机翼、壁板等在装配过程中,蒙皮的装配、连接(指基于装配完成的骨架进行蒙皮的装配,或骨架蒙皮同时进行装配,实现机身、机翼、壁板等部件装配,以下简称大飞机蒙皮装配或大飞机蒙皮装配、连接)是一项关键技术。大飞机蒙皮装配主要包括壁板蒙皮装配、机身蒙皮装配和机翼蒙皮装配等。从装配工艺设计到自动制孔连接形成完整的蒙皮装配链,包括制孔和连接工艺设计、制孔和连接程序编制、装配工装设计与制造、制孔和连接过程仿真、制孔和连接实施等几个阶段。目前国内外在各个阶段已经进行了一些研究,刘顺涛、韩志仁等研究了自动制孔工艺设计[2];刘平、韩志仁等研究了自动钻铆夹持点布局优化方法[3-4];王会周等研究了制孔与铆接工艺方案[5];董辉跃等研究了自动制孔离线编程技术[6-8];凌波等研究了自动制孔仿真技术[9];这些技术的研究与发展促进了蒙皮装配智能化、数字化的发展,他们均属于整个制造体系的一部分。
目前采用自动设备进行蒙皮的装配、连接还处于发展阶段,逐渐形成完整的优化的体系。根据研究整理了蒙皮自动装配、连接的基本流程如图1所示。该基本流程中关键节点包括“自动制孔、连接工艺设计”、“自动制孔、连接编程”、“工装设计”以及“自动制孔、连接过程仿真”。本文主要将对以上内容进行讨论,其中“自动制孔、连接过程仿真”与“自动制孔、连接编程”关系紧密,将二者并入同一部分进行讨论。
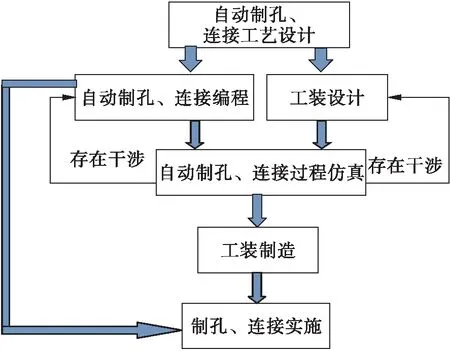
图1 基于蒙皮的部件自动化装配、连接基本流程
1 自动制孔和连接工艺设计
针对机身、机翼、壁板等部件的装配过程中,蒙皮装配的自动制孔和连接工艺进行设计。首先指定在一次自动制孔和连接任务中需要装配的蒙皮,根据该蒙皮进行工艺设计(这里工艺设计包括两个部分:一部分是规划设计和信息获取与梳理,也就是本节讨论的问题;第二部分是具体的制孔加工和连接(如铆接)的工艺参数、路径等,将在自动制孔与编程的部分讨论)。设计内容包括自动获取制孔需要的信息,从而确定定位基准、夹紧方式、制孔位置、自动制孔的对象等。该部分工艺信息的载体是部件的数模,自动制孔工艺设计结果直接添加到装配数模中,作为数模的一部分表达工艺信息,并且这些信息在结构树上处于工艺区,与设计提供的模型存在鲜明的界限。制孔和连接工艺设计包括基准孔设计、夹紧孔设计、自动制孔设计三大类,这三类孔的制孔信息类型相同,均包括点位和法矢、连接件材料顺序、夹层厚度、夹层厚度顺序、硬化状态、标准件信息等[1]。制孔和连接工艺设计作为独立工作部分,可以用二次开发出来的专用软件进行设计,从而保证制孔和连接工艺设计结果的规范性、正确性、适用性,可以与各种自动制孔和连接设备采用标准接口进行对接,图2所示为制孔和连接工艺设计结果。
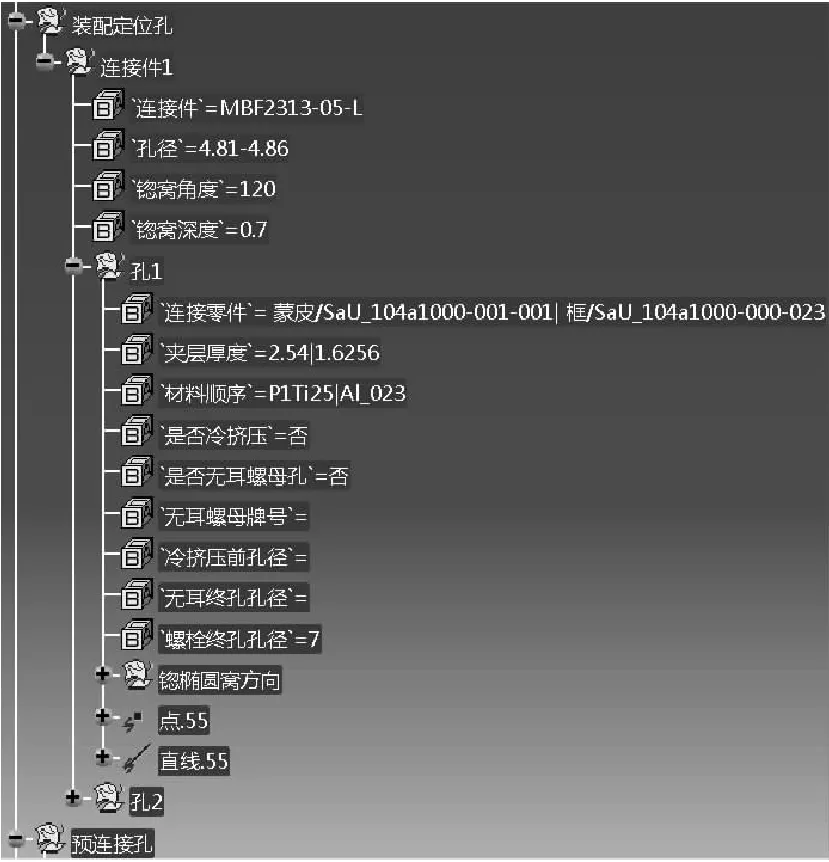
图2 规范化的制孔与连接工艺设计结果
随着数字化制造和智能制造技术的发展,自动制孔和连接设备在航空企业已经逐渐应用,虽然经历了5年以上的应用研究,但相关技术还没有完全成熟。目前航空企业主要将制孔和连接工艺设计与程序编制作为一个整体,也就是设计工艺与编程同时进行,在处理各种自动制孔设备的时候,更多考虑编程问题而忽略了工艺设计,容易造成人为遗漏和信息获取不充分、问题责任人混乱等问题。这种工艺设计与数控编程混合在一起的工作模式必将被工艺设计和数控编程独立工作模式取代。
2 自动制孔和连接技术
制孔和连接程序的编制涉及制孔设备类型、装配件定位、装配件开敞性、编程路径规划、二次定位、位置误差补偿方法等问题。它包括自动制孔编程和自动连接编程两部分,依据工艺设计给出的制孔工艺信息、连接信息与具体制孔的相关加工参数等在自动制孔编程时进行确定,自动连接编程的考虑主要针对螺栓连接和铆接两大类。
2.1 自动制孔和铆接设备
由于自动钻铆设备具有能够进行制孔操作和铆接质量稳定的优点,20世纪60年代就已经开始使用,早期投入使用的自动钻铆机一般通过手动托架或自动托架对装配部件进行定位[10-14]。在数字化制造和智能化制造的背景下,自动钻铆设备发展迅速,主要包括三类。
第一类是在传统自动钻铆机的基础上结合先进的数控技术发展而来的多自由度自动钻铆机[10-14],主要包括自动钻铆系统和托架系统。根据结构形式和尺寸的不同,适合于不同机型的机翼、机身等部件上的壁板装配,对装配的部件开敞性要求高,如图3所示,特制的自动钻铆机也可以用于部件的钻铆,如图4所示。
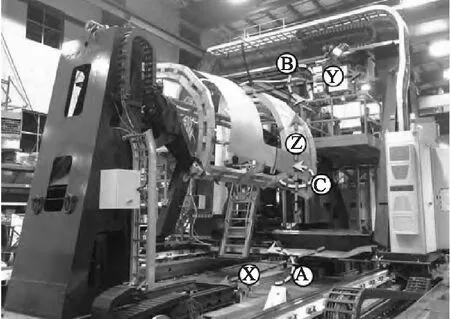
图3 用于壁板的自动钻铆机
第二类是基于机器人的自动钻铆设备[15],包括大载荷的机器人与自动钻铆末端执行器构成最小机器人自动钻铆单元,根据需要可以在横向和纵向进行扩展,通过扩展扩大自动钻铆的工作范围,满足大部件的自动钻铆需求。图5为横向扩展机器人钻铆系统,图6为数控平台扩展的机器人钻铆系统。每个最小机器人自动钻铆单元一般和另一辅助的机器人单元配合使用实现自动钻铆,对于单纯的自动制孔或单面铆机,最小机器人的自动钻铆单元可以独立工作。基于机器人的自动钻铆设备相比传统结构的自动钻铆机,具有对部件的开敞性要求低、可扩展性强、可控自由度多、智能化程度高等优点。对于大飞机机翼壁板等超长部件,可以通过几台机器人钻铆机组成钻铆系统(如图5所示);对于长和宽均大尺寸的部件,数控平台和工业机器人共同组成一个钻铆系统(如图6所示)。基于机器人的自动钻铆设备不仅适用于机身和机翼壁板的自动钻铆,还适用于机身封闭结构,通过机身内的机器人和机身外的机器人配合使用完成自动钻铆工作(如图7所示),是该系统独特的优势之一。

图4 专用自动钻铆机
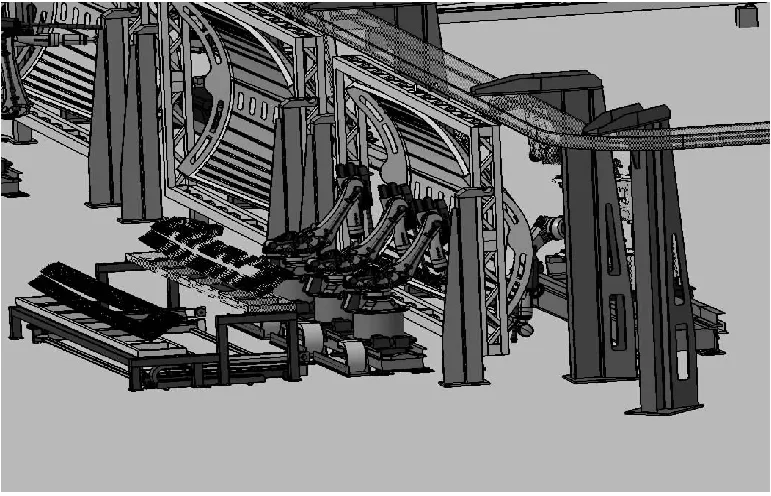
图5 横向扩展机器人钻铆系统图
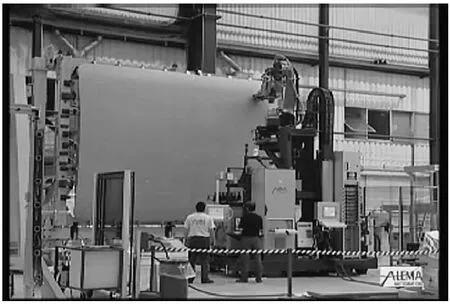
图6 数控平台扩展的机器人钻铆系统
第三类是轻便的爬行机器人自动钻铆设备,用于在部件装配后期的局部钻铆工作,如图8所示。
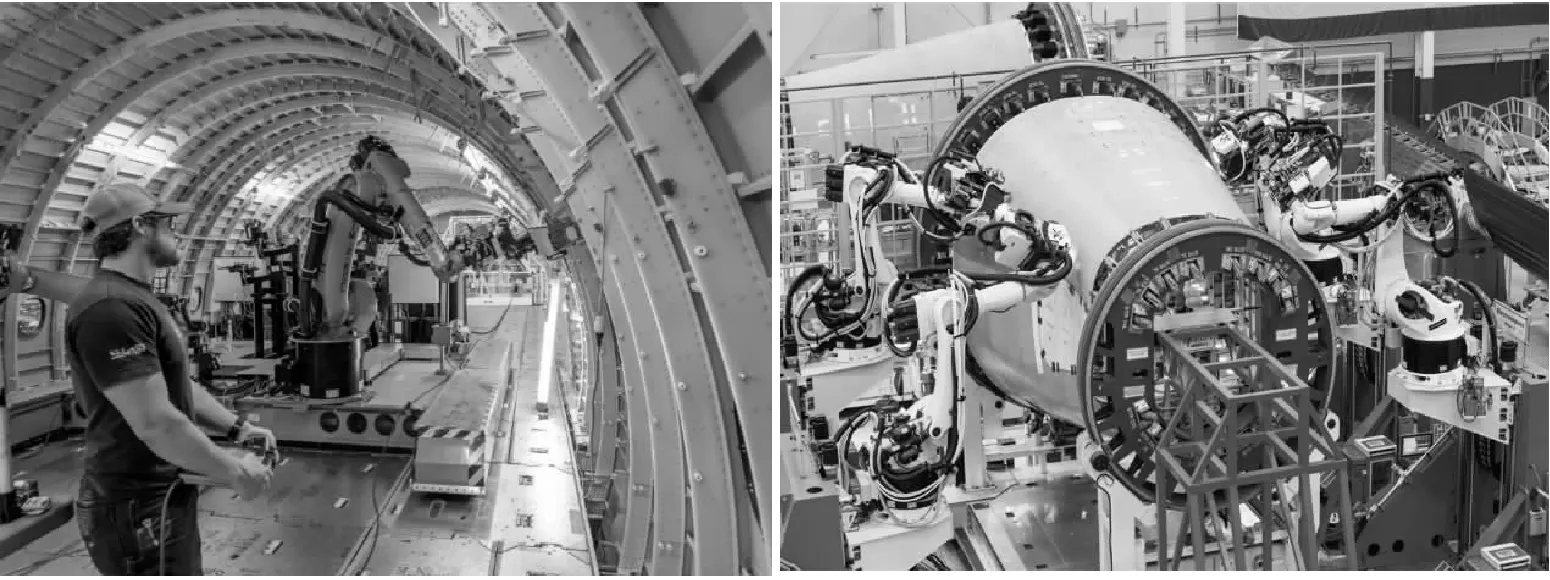
图7 机器人钻铆系统用于机身装配
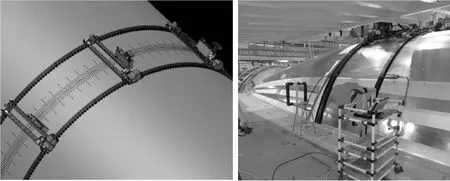
图8 爬行机器人自动钻铆系统
2.2 装配件定位问题
自动钻铆过程与飞机坐标系、工装坐标系、机器人坐标系等有关。部件的描述是依据飞机的全局坐标系,工装设计根据需要设立工装局部坐标系,而工作机器人有自己的坐标系,这些坐标系需要进行整合,需要通过基准将所有坐标系拟合在一起。蒙皮通过基准确定与工装和蒙皮支撑骨架的关系,骨架通过基准建立与工装的关系,工装通过基准建立与机器人的关系,在这些转换过程中必然存在误差,需要对这些误差进行补偿,减小装配误差。制孔位置误差包括机器人定位的绝对误差、机器人坐标系与飞机坐标系的关系标定误差(基准加工误差和拟合误差造成的标定误差)、坐标转换误差等。另外,还有蒙皮定位基准加工误差、工装与骨架定位基准加工误差以及导致的蒙皮和骨架与工装之间的相对位置误差,装配过程中的零件变形造成的误差等,这些误差都会造成蒙皮和骨架偏离理论位置[16-20]。
蒙皮和骨架与理论位置存在误差,自动钻铆设备的绝对误差、标定误差和坐标转换误差造成的制孔定位与理论孔位的误差[6],这两大类误差造成制孔综合误差。一般采用的方法是按理论值进行离线编程,根据实际测得的边界顶点偏移量对理论值进行线性插值补偿[2],这种方法会带来繁琐的工作,造成自动制孔准备时间加长,效率降低。在骨架和蒙皮满足整体要求的前提下,应该更关心孔与被连接骨架的相对位置关系,在实际装配过程中通过调整孔的坐标位置,保证孔与被连接骨架的位置关系,通过孔与被连接骨架合理的位置关系保证了孔相对于与被连接骨架的边距符合规范,同时保证了孔的位置不会影响钻铆操作等。因此,建议采取以下措施。
(1)提高定位孔的位置和尺寸精度;
(2)减少自动钻铆过程中二次定位、工装运动等带来的位置误差;
(3)通过照相测量等方法快速获取自动钻铆骨架的位置与理论位置的误差,实现快速补偿,这个问题一直是国内没有得到很好解决的问题,也是影响实际应用的关键问题。
2.3 加工路径规划与钻铆仿真
制孔和连接编程包括制孔和连接末端执行器运动的路径、制孔和连接工艺过程的实施等,末端执行器运动的路径和工艺实施过程直接影响到加工质量、加工效率以及加工的安全性[5,8-9,21]。目前研究最多的是根据使用的刀具进行分组(在孔位加工路径规划时应对孔位进行分组,类型相同并使用同种刀具的孔位应分在一组按顺序加工,这样可以减少换刀次数,保证加工效率),末端执行器运动的路径最短,安全避让等因素,将这些因素作为约束元素进行加工路径规划[3-4]。对于加工安全性中避让问题需要通过后续的仿真进行进一步的确认,工艺相关的安全性问题一般没有充分考虑,比如在制孔过程中制孔顺序对制孔中构件的刚性影响和制孔质量的影响。实际自动钻铆一般采用双向夹紧的方法,这种情况容易保证制孔的基本刚度要求,由于空间限制等原因,有时在没有支撑的情况下制孔,该情况下制孔顺序会影响制孔时的刚度。
如图9所示为无支撑制孔,为了保证制孔的基本刚度要求,预先在1、7位置进行了预先连接,在自动制孔过程中每制一个孔就会造成局部刚度下降,在这种情况下,对于图9中的制孔问题,如果按2、3、4、5、6的顺序进行制孔,4位置制孔时刚度低,采用4、3、5、6、2的顺序,可以优化制孔时的刚度。蒙皮在连接过程中存在变形,在铆接过程中如果沿着一个方向顺序铆接,也可能造成蒙皮变形的积累,蒙皮沿一个方向变长等问题,影响装配质量。因此,编程中加工路径规划是一个复杂问题,需要综合考虑加工工艺、连接刚度、安全避让、效率等问题[22-26],路径最短不是关键问题,具体如下。
(1)按制孔和连接工艺相同的原则进行分组;
(2)充分考虑连接结构的开放性,蒙皮装配连接的骨架一侧是避让考虑的重点;
(3)考虑制孔和连接过程中的刚度和变形,制定制孔和连接顺序相关的工艺方案;
(4)在充分考虑前面3个问题的基础上优化加工路径,提高效率;
(5)虽然路径规划考虑了碰撞等安全性避让问题,不能作为最后的安全保证依据,需要通过制孔和连接几何仿真进行最后的安全确认;
(6)考虑分站式机器人分区优化和协调问题。
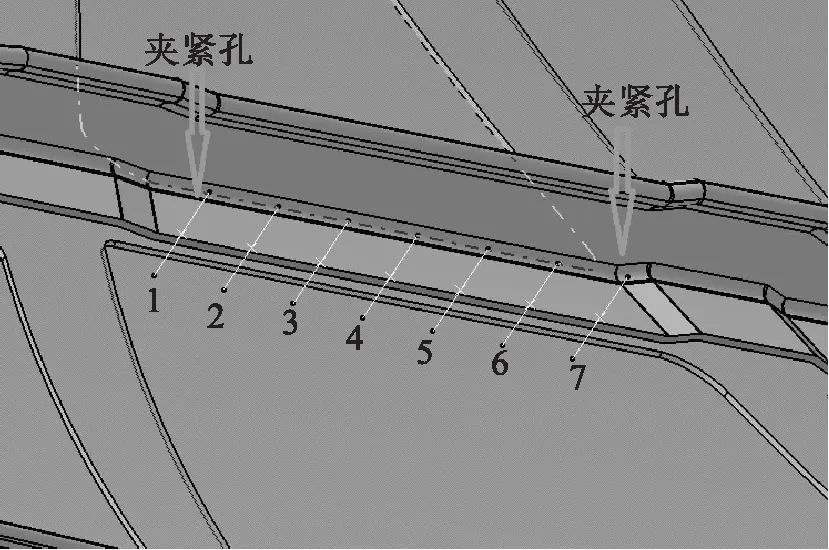
图9 制孔与连接示意图
制孔和连接仿真技术主要解决加工过程中的干涉和碰撞问题,属于运动仿真和几何仿真范畴,它包括运动仿真与干涉检测两部分内容。通过加工过程仿真,操作人员可以直观观察整个钻铆加工过程,有利于对整个加工过程的把握,避免加工过程中出现干涉和碰撞现象[3,5]。制孔与连接仿真过程中涉及的物理对象不同,例如采用的自动钻铆设备不同、工装结构不同、装配部件不同等,一般基于Delmia或CATIA进行仿真,因此需要根据企业现有自动钻铆设备的情况,建立自动钻铆设备的几何模型,基于Delmia或CATIA开发专用的装配仿真软件。
3 装配工装的设计与制造
大飞机蒙皮制孔与连接的工装设计与采用的制孔和连接设备有关,针对不同的设备在设计装配工装时需要特殊考虑。总体而言工装设计所考虑的问题基本相同,包括被连接骨架、蒙皮的定位和夹紧方式,建立制孔连接设备的坐标系与工装坐标系和飞机全局坐标系的基准等。
对于基于托架的自动钻铆机,工装设计时需要考虑托架的结构和提供的连接接口、摆放位置和姿态等,通过基于托架的工装将需要装配的部件通过定位基准整合在一起,工装以托架为框架设计定位卡板和定位基准,如图10所示。制孔和连接时部件和工装的整体刚度取决于托架的刚度。对于长度超出托架范围的部件,需要二次定位。在制孔和连接过程中通过托架的运动调整部件的姿态,以便保证法线与制孔钻头轴线一致。这种方式中部件和托架不停的运动改变姿态,需要进行反复的坐标变化,会带来计算误差和累计误差。另外,骨架在装配过程中存在位置误差,这种位置误差可能较大,会造成边距不足或干涉等问题,因此在实际的制孔过程中不能完全按理论位置进行工作,需要经常进行修正,快速自动修正制孔位置是自动制孔和连接有效应用的关键。
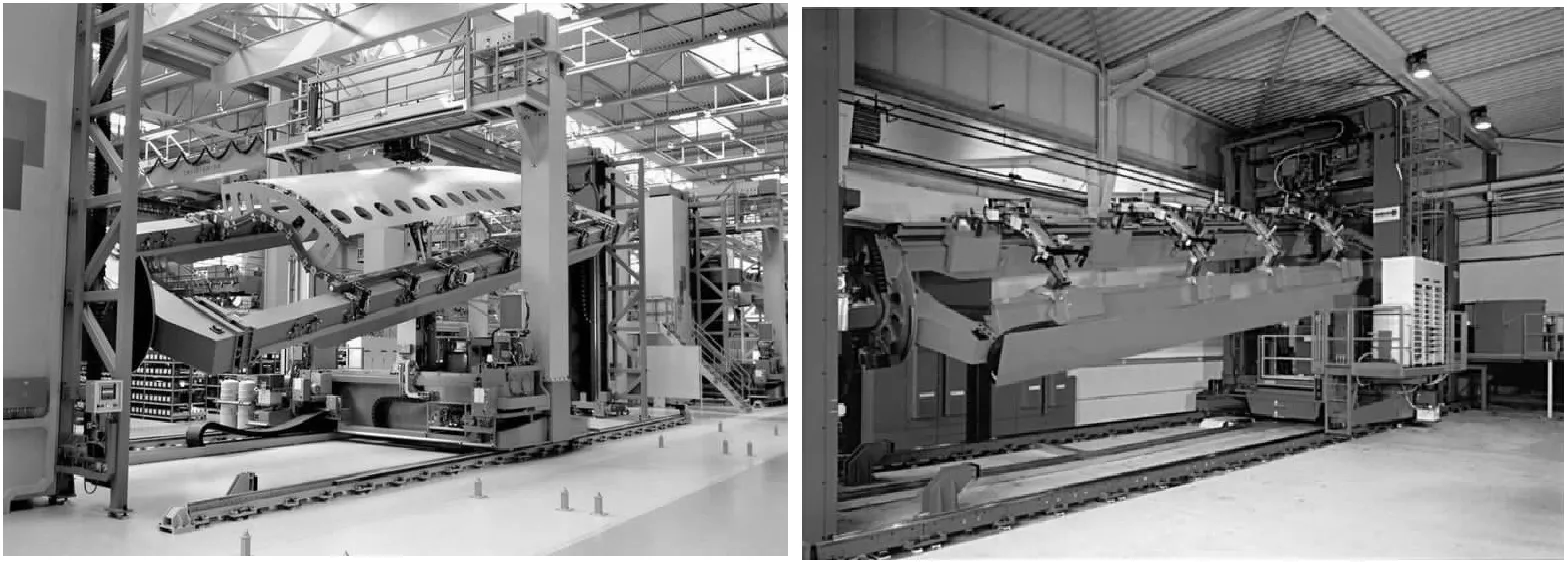
图10 基于托架的工装
对于非基于托架的自动钻铆机,工装一般为固定式,也就说工装本身完全固定,不需要运动改变姿态。在制孔和连接过程中末端执行器在机器人和数控平台的带动下,完成位置和姿态调整。这种方式中部件固定在工装上,不需要运动,运动误差主要来源于末端执行器。工装的形式分为两种,即固定工装和柔性工装,柔性工装更适合数字化制造,提高效率。工装可以通过工装定位基准与数控系统整合在一起,而部件通过定位基准将工装和部件整合在一起。该方式一般不存在部件二次定位问题,但为了提高精度,数控系统可以根据设立的高精度基准进行多次校准。骨架位置也是一个关键问题,需要解决快速自动修正制孔位置。
现阶段飞机工装的数字化设计与制造一般分为模具、装配工装、焊接夹具三部分。在数字化设计与制造装配型架工装的时候,应该特别注意装配工装零件材料的选择,应选择膨胀系数相近的。支撑件选用大型铸铁制作,具有较高的刚性和减震功能。对于大型的装配型架工装,应该考虑设计与制造的模块化、标准化,可以节省大量时间,在此基础上还可以建立品种齐全的标准件和成品件库。工装的设计与制造要实现一体化,既要进行组织体系上的人员分工,也要处理好设计与制造单位的沟通协调。
4 结论
我国在智能化、数字化发展的背景下,大飞机的研制直接上了快车道,各种新技术得到应用,总体发展良好。但是由于我们的发展跨越了一些发展过程,在技术积累和技术内涵方面与国外还存在差距,因此我国在大飞机技术发展过程中更应注重技术体系的研究和完善,从大局把控具体的技术发展方向。本文分析和研究了基于蒙皮的机身、机翼、壁板等部件自动制孔、连接的相关技术和体系,提出了整体方案,希望对该方面的技术发展有所帮助。
