基于运动放大的振动结构的模态识别
2018-09-19李丽霞陈海卫
李丽霞,陈海卫
(江南大学机械工程学院,江苏无锡 214122)
0 引言
快速准确地获取结构的振动信息是进行结构模态分析从而确定模态参数的关键。传统的模态参数识别一般采用加速度计测量[1]。但测量过程工作量大又枯燥乏味,并且在测量微小结构时,加速度计本身会增加测量结构的质量并影响测量结果。视觉测量是一种非接触式的振动测量技术,具有全场测量、不改变被测结构的振动特性等优点。随着计算机视觉和高速相机技术的发展,视觉测量振动逐渐受到人们的重视,无论是高精密、高分辨率的相机,还是随处可见的类似手机摄像头的设备,都能用到实际测量中,只是如何提取可量化信息还是一直研究的问题。为此,研究人员提出了许多图像处理算法,主要有边缘检测,目标跟踪等[2-4],如陈若珠对粘贴有人工标志的弹性结构试件进行变形位移的测量[5];王冠英等人采用扫描仪与Matlab图像处理技术相结合的方法,对织针针坯模具进行了快速、准确地非接触式测量[6]。相比常规图像处理算法,一些计算机视觉算法可以更好地解决振动测量的问题,如E.Caetano提出了用光流法确定结构的位移[7],J.Chen提出了检测结构中亚像素运动的位移提取方法[8],这些方法通过时域滤波可提取结构的不同阶模态,在模态识别方面比较理想。本文研究的模态识别方法与其相关。
本文采用了一种新的运动放大算法——基于相位的里斯金字塔快速运动放大[9],用于结构的模态识别。该算法可以在不提取振动位移的情况下直接展示结构的模态振型,且该算法采用里斯金字塔空间分解,使其处理速度得到了很大程度的提高,因此也称其为实时运动放大。本文首先对运动放大的理论进行了概述,接着以悬臂梁为例,搭建了基于加速度计和高速相机的模态识别实验系统,并对其实验结果进行模态置信准则 (MAC)检验。本文的研究对于基于视觉的振动测量方面具有重要意义。
1 理论
1.1 图像处理
视频由一系列图片组成,因此有两个域:空间域对应一幅图像亮度值的2D场,时域对应随着时间变化生成视频的图像。在空间域,图像可以被滤波器分解成振幅和相位信号,类似于一个加速度传感器信号傅里叶变换或小波变换被分解。图像处理的结果就是使得所有图像的空间振幅信号和相位信号合成后得到比原图像更容易处理的时变信号。
1.2 运动放大
运动放大[9-12]是一种可放大人肉眼不可见的微小运动的计算机视觉技术,被形象地称为“微小运动显微镜”。该技术在2013年被美国Science提名为过去10年将科学研究成果带入人们生活的重要发现之一。运动放大技术最早由美国MIT的Freeman团队提出,并在不断地发展和改进。2005年Liu等人提出了基于拉格朗日的运动放大方法[10],该方法通过图像配准、特征点跟踪、运动轨迹聚类、密集光流插值、运动层分割、指定层的放大,以及视频渲染实现了视频微小运动的放大。2012年Wu等人提出了一种线性的基于欧拉的微小运动放大方法[11],该方法将视角固定在整幅图像,假设整幅图像都在变化,只是这些变化信号的频率、振幅等特性各不相同,经过对每个像素点进行空间分解,再经过时域滤波将感兴趣的信号提取出来,最后只放大感兴趣的信号部分。2013年,Neal等人提出了一种基于相位的运动放大技术[12](Phase-based video motion processing),该方法是对欧拉运动放大法的改进,采用复合可控金字塔进行图像的空间分解,有效抑制了图像噪声,并且支持更大的放大倍数。2014年Neal等人又提出了运动放大技术的一种加速方法——里斯金字塔对基于相位的运动放大方法的加速[9],该方法相比之前的方法使得处理速度提升了20%~80%,因此也称实时运动放大。目前,微小运动放大技术已经在影像处理、医疗诊断、机械工程等领域中表现出重要的应用前景,例如,在医疗诊断中通过捕捉人脸的视频信息分析人体的心率,实现非接触式的脉搏检测技术;在远程手术中通过运动放大技术将医生肉眼不容易看清的手术部位进行放大可以有效提高手术效率,在工程应用上,通过视频放大技术对结构微小变形进行监控,能对危险事故作出有效的判断和预警,减少工程事故的发生。本文的研究就是运动放大技术在结构振动模态方面的应用。
1.3 基于相位的里斯金字塔快速运动放大技术
运动放大[10]是一种通过空间分解、时频带通滤波、放大,以及重建,来获取一些肉眼不见的运动信息的技术。本文采用的算法是运动放大的一种新的算法——基于相位的里斯金字塔快速运动放大,采用里斯金字塔滤波器将视频信号分解为局部空间振幅和相位,局部相位信号直接在时域上带通滤波和放大,然后重建成指定频率带上的运动被放大的视频。其处理过程如图1所示。
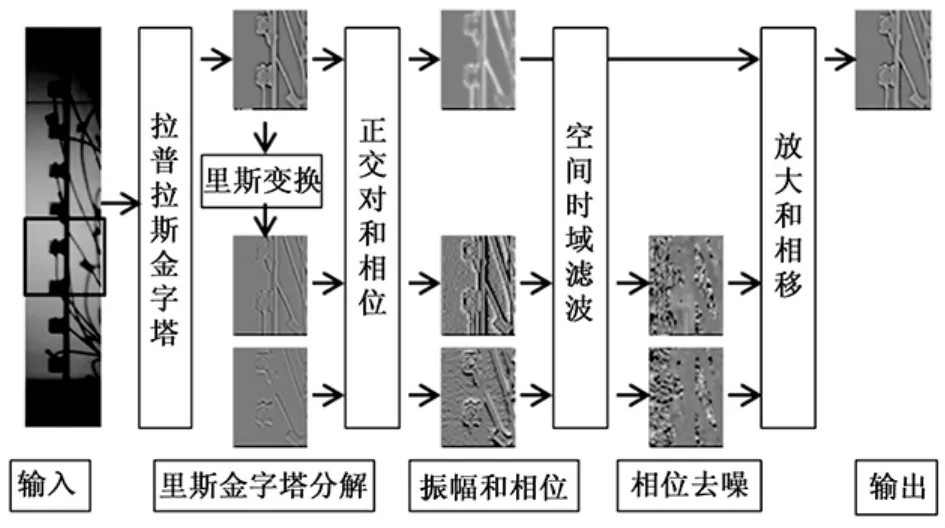
图1 基于相位的里斯金字塔快速放大算法处理过程
相比之前的运动放大算法,该算法采用希尔伯特变换的二维推广——里斯变换,使运动放大的速度达到每秒处理35帧640*400的图片 (常用的笔记本电脑处理系统)。在二维空间,里斯变换是一对带有传递函数的滤波器F1,F2。如若将它们应用于图像子带I(x,y,t),其结果就是一对滤波器响应R1,R2。
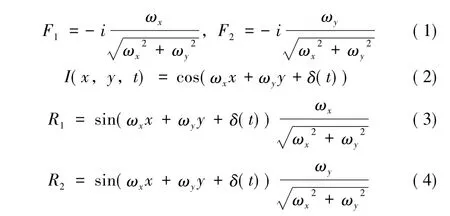
里斯变换可以被引向任意方向,因此具有方向不变性。例如图像序列通过公式 (5)矩阵相乘可以指向任意θ方向,从而在指定方向进行希尔伯特变换。

如果里斯变换通过tan-1(R2/R1)被引向主方向θ0矩阵相乘的结果就只有一个非零向量,在上面的例子中,输入图像序列沿着主方向的希尔伯特变换结果就是:

类似一维变换,与原图像序列结合生成一个含有相位的复合信号:

这个信号能被时域滤波消除wxx+wyy部分。剩余项δ(t)是能被放大并用于相位变换的复合信号,其实部是原图像序列I(x,y,t)被放大的部分,即:

里斯变换的图像表现如图2所示。
更多关于基于相位的里斯金字塔快速运动放大算法的详细解释和推导见参考文献[8]。
1.4 模态置信准则 (Mode Assurance Criterion)
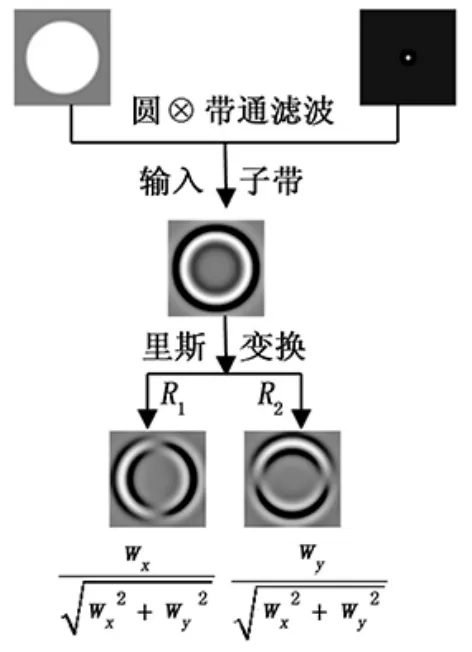
图2 里斯变换
模态置信准则 (Mode Assurance Criterion)又称振型相关系数,是用来表示两个模型之间的模态振型相似度。振型相关系数通常采用以下定义:
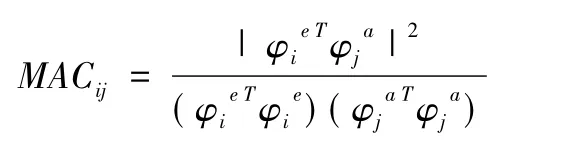
其中:MACij代表一种模型第i阶振型与另一种模型的第j阶振型之间的相关系数;代表一种模型的第i阶振型;代表另一种模型的第j阶振型;T代表共轭转置。
本文我们通过对两种模型之间的振型进行了振型相关系数 (MAC)的计算,以此来检查实验模型数据的好坏。
2 模态识别
理论计算和有限元分析是理论模态分析方法,作为实际生活中试验模态的数据参考,一般来说理论分析的模态参数更具有参考优势,所以本文采用的理论依据为理论分析的模态参数。加速度计测量是试验模态识别中常用的接触式测量方法,且测量结果比较准确,只是在测量微小结构时将无法保证测量数据的准确性,所以为了使得加速度计测量数据作为对比的依据,本文选用便于安装加速度计的悬臂梁结构。下面以悬臂梁为例,进行了振动结构模态识别方法的研究。
2.1 理论模态

其中:E为杨氏模量,I为梁截面对中性轴的惯性矩,ρ为梁的密度,S为梁的横截面积,ε(x,t)为梁的横向弯度。
采用分离变量法,令ε(x,t)=Y(x)T(t),所谓振型分析就是对Y(x)求解,引入中间变量则:

其中:Y1,Y2,Y3,Y4由边界条件确定。对于长度为L的悬臂梁,边界条件如下:
悬臂梁振动方程:

将式 (11)代入式 (10),得:

求解方程得 α1L=1.875; α2L=4.694; α3L=7.854; αnL=(n- 0.5)π,(n≥4)。


本文实验的悬臂梁长度L=1.2 m,厚度h=0.006 m,宽度b=0.03 m。所用材料弹性系数E=2×1011kg/m2,梁的密度ρ=7.8×103kg/m3。计算得前3阶频率为:f1=3.41 Hz;f2=21.36 Hz;f3=59.80 Hz。
悬臂梁振型曲线方程即为Yn(x)=Y1sinαnx+Y2cosαnx+Y3sinhαnx+Y4coshαnx悬臂梁前3阶模态振型如图3所示。
另外,悬臂梁的固有频率:

图3 悬臂梁理论模态振型
2.2 加速度计测量
系统结构的模态参数识别方法主要分为频域识别法和时域识别法。频域识别法主要是在测量过程中利用输入信号和输出响应进行傅里叶变换和拉普拉斯变换,以获取系统结构的频域响应函数和传递函数,再由它们来获得系统结构的模态参数。所以即使是信噪比相对较差的情况下,使用频域识别法也能获得较好的识别结果。LMS系统的锤击法模态测量就是一种频域识别法。下面是本文采用的加速度计测量模态的步骤:
1)建立LMS锤击法模态测试实验系统,包括LMS测振系统、加速度传感器、悬臂梁等,如图4所示。
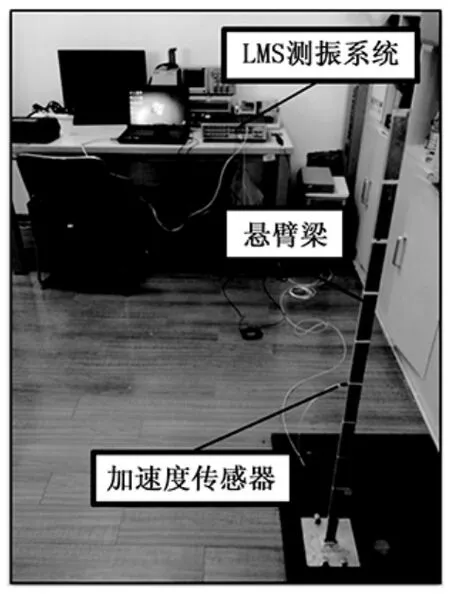
图4 悬臂梁加速度计实验装置
2)根据模态分析原理,因为选用锤击法激振,所以本文选用的悬臂梁结构较为轻小、阻尼不大。为了避免加速度计本身对测量结构的影响,实验只安装了一个加速度计,采用多点敲击单点响应的方法,在设置的各个点依次敲击测量。采集的振动位移信号如图5所示。
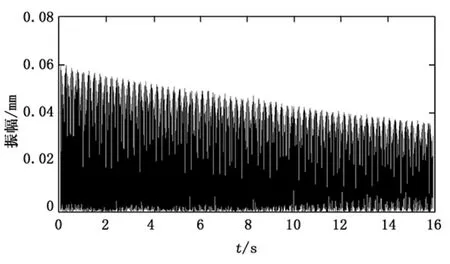
图5 悬臂梁的振动位移信号
3)选择频响函数比较好的测量数据进行悬臂梁的模态分析,最终确定的悬臂梁结构的前三阶模态参数如图6所示。(a)、(b)、(c)分别表示悬臂梁频率为3.36 Hz的第一阶、20.77 Hz的第二阶,和58.16 Hz的第3阶模态振型。
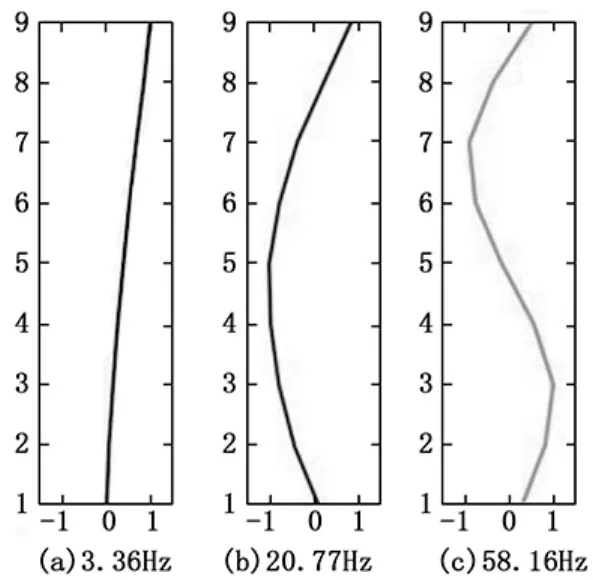
图6 加速度计测量的模态参数
2.3 高速相机测量
采用高速相机进行模态识别的过程如下:
1)测量系统搭建:搭建高速相机图像采集系统,主要由IDT-Y4-S1型号的高速相机、补光灯、悬臂梁等组成。如图7所示。
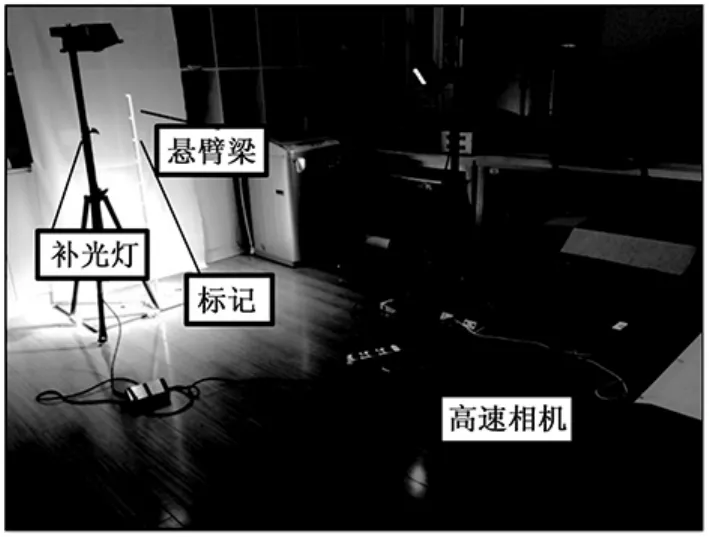
图7 悬臂梁高速相机实验装置
2)视频采集:采用锤击法激励悬臂梁,力锤激励后相机随即以1 500帧/s进行视频采集,视频分辨率为224*672。
3)基于相位的里斯金字塔运动放大处理:
(1)视频输入。
(2)拉普拉斯金字塔分解:将输入的振动结构视频进行拉普拉斯金字塔多分辨率分解,以降低图像分辨率,提高算法处理速度。
(3)里斯变换:将分解后的每一个子带进行里斯变换,这里我们通过Riesz分量来计算子带的90度相移值,然后根据得到的正交对来计算相位。
(4)时域滤波:将产生的带有幅值和相位的信号经过巴特沃斯滤波器分别时域滤波3~4 Hz,18~23 Hz,和56~64 Hz的频率带,以提取我们感兴趣区域的运动。
(5)相位去噪:采用高斯滤波对步骤5)的结果进行信号平滑,提高信号信噪比 (SNR)。
(6)放大:以20倍的放大因子放大3~4 Hz频率带的相位信号;以50倍的放大因子放大18~23 Hz频率带的相位信号,以100倍的放大因子放大56~64 Hz频率带的相位信号。即放大我们感兴趣区域的运动信号。
(7)视频重建:放大后的信号再经过金字塔反变换,重构到原视频。运动放大处理后结果如图8所示, (a)、(b)、(c) 分别对应频率带为3~4 Hz,18~23 Hz,56~64 Hz的运动放大的视频截图。
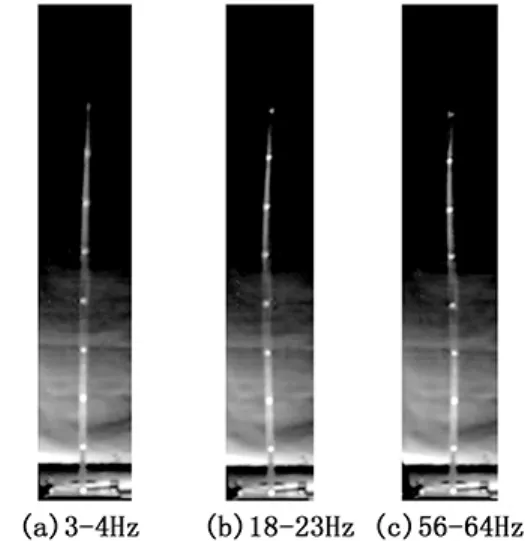
图8 运动放大后的视频截图
4)边缘提取:提取运动放大后结构挠度最大的一帧,采用精确亚像素边缘提取算法对图8进行边缘提取。图9为最终提取的振动结构的模态振型。

图9 亚像素边缘提取的前三阶模态振型
2.4 结果与分析
通过以上研究可知,建立振动方程计算的悬臂梁理论模态参数有:悬臂梁前三阶固有频率分别为3.41 Hz,21.36 Hz和59.8 Hz,理论振型如图3所示;加速度计测量的悬臂梁前三阶模态频率分别为3.36 Hz,20.77 Hz,和58.16 Hz,模态振型如图5所示;基于运动放大的模态识别方法识别的前3阶模态对应的振型如图9所示。将实验模态依据理论模态进行模态置信准则 (MAC)检验,见表1。
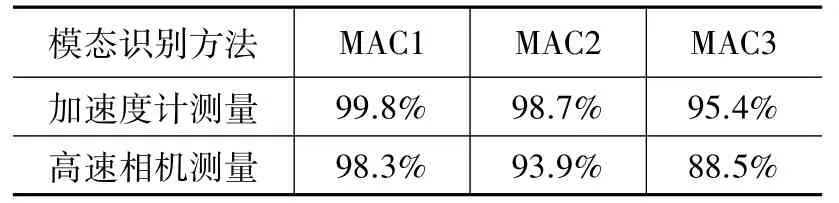
表1 加速度计和高速相机测量结果与理论模态振型的MAC值
由表1可知,加速度计测量结果与理论模态的前3阶模态振型的MAC值分别为99.8%、98.7%、和95.4%;基于运动放大的模态识别结果与理论模态的前3阶模态振型的MAC值分别为98.3%、93.9%,和88.5%。
从实验数据分析发现,本文采用的基于视觉的模态识别方法识别的模态振型与理论振型最相关性可以达到98.3%,所以基于运动放大的模态识别技术可以用于振动结构的模态识别且识别结果比较准确,特别是大型结构,如桥梁、高层建筑、飞机船舶等,本文研究的方法表现出很大的应用优势。
3 结论
1)通过基于高速相机的悬臂梁振动测量实验,证实了基于相位的里斯金字塔运动放大技术可用于结构的振动测量,且模态识别结果比较准确;
2)作为对本文方法的对比,搭建了悬臂梁的加速度计振动测量实验系统,比较发现:本文的视觉测量方法简单易操作,而且不需要依赖昂贵的测振系统。另外,对于加速度计无法实现的微小结构或远距离的振动测量,本文方法均可测量;
3)相比其他的视觉模态识别技术,本文提出的振动参数识别技术可在不提取位移的情况下直接展示振动结构的模态振型,因此大大提高了振动测量的效率。
4)本文提出的模态识别技术对于测量物体所处的光照环境要求较高,但如果选择合适的光源或在室外阳光充足的情况下该技术同样适用。
5)对于具有复杂几何结构、接近耦合模态,以及相机晃动的情况的测量,本文提出的模态识别技术还有待进一步研究和改进。
