某型导引头综合测试设备的设计与实现
2018-09-19贾景堃秦彦君熊厚金
贾景堃,秦彦君,熊厚金
(1.北京航天测控技术有限公司,北京 100041;2.国营长虹机械厂,广西桂林 541003)
0 引言
导引头是截获跟踪[1]目标以控制航向的核心部件,广泛应用于各种飞行器械。电视导引头首先将摄像机获取的目标区域图像通过图像发射机发送给机载吊舱设备,由操控人员选取并锁定目标,导引头通过不断获取目标区域图像信息,并不断对目标方位进行相关分析从而输出方向控制信号,使得目标保持在导引头视场中央区域直至接触目标为止。
电视制导作为末端制导阶段的有效制导措施其优点是利用图像信息进行方向控制,具有较高控制精度,为精确制导提供了有效且实时的导引措施。缺点是受环境影响较大作用距离受限,不能适应于全天候工作。
本文所涉及的测试设备运用VXI总线及虚拟仪器等技术,设计开发拥有完备的测试手段及多种型号导引头维修专家知识库,能够对多种型号导引头光、机、电各组成部分的性能指标进行测试,实现故障精确定位,是维修人员的有力工具。
1 电视导引头组成及原理
电视导引头由光、机、电等多种功能复杂的部件组成,根据功能划分,电视导引头主要由以下功能单元组成:电视成像系统、陀螺稳定平台、控制单元、校正和目标指示组合、相关鉴别器、图像信号处理系统、指令变换器和电源组合。某型电视导引头结构如图1所示。
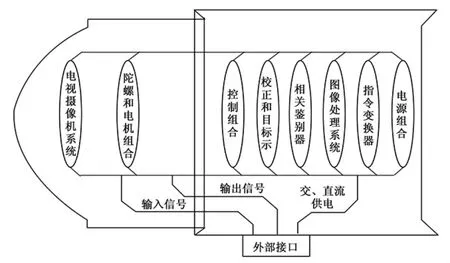
图1 电视导引头功能结构图
某型导引头采用较老制式的扫描摄像管实现外界图像到视频电流信号的转换过程。外界光线经光学系统汇聚后照射到摄像管的光电阴极,光电阴极上将产生相应的电子束,电子束在摄像管的前端加速后轰击到中部的摄像管靶面上,靶面上将建立与入射图像一致的电位图像。
扫描摄像管后端设有受控的扫描线圈发射电子束在靶面上做之字形扫描,将靶面上的图像点电位一一复位归零,靶面上各像素点电位归零时将输出与原电位成比例的电流信号,此电流信号即为视频电流信号。
扫描线圈参数固定,因此扫描的行场参数为已知参数,当目标出现后可根据行场扫描的时间定位目标在视场相对于中心的水平及俯仰偏差[2]。相关鉴别器实现目标偏航及俯仰位置偏差的测量并将偏差转换为电压信号。位置偏差信号送至导引头伺服系统,在陀螺平台姿态信号参考下,伺服系统将控制导引头将目标迅速移至视场中心与光轴重合,达到目标跟踪效果。电视导引头工作原理如图2所示。
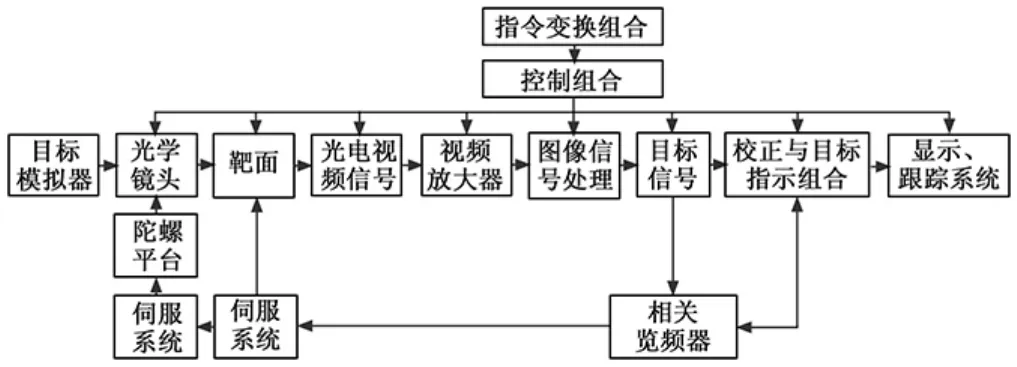
图2 电视导引头工作原理示意图
2 测试设备总体设计
电视导引头综合测试设备由通用测试平台、专用设备、辅助设备组成。通用测试平台包括工控机、VXI仪器、LAN总线台式仪器和通用测试接口 (ICA)等。专用设备主要是测试适配器和测试线缆,测试适配器和测试线缆都是针对具体型号设计,各型号对象均配有各自专用的测试适配器和测试线缆。辅助设备包括测试转台、目标模拟器等。图3给出了通用测试平台的组成示意图。
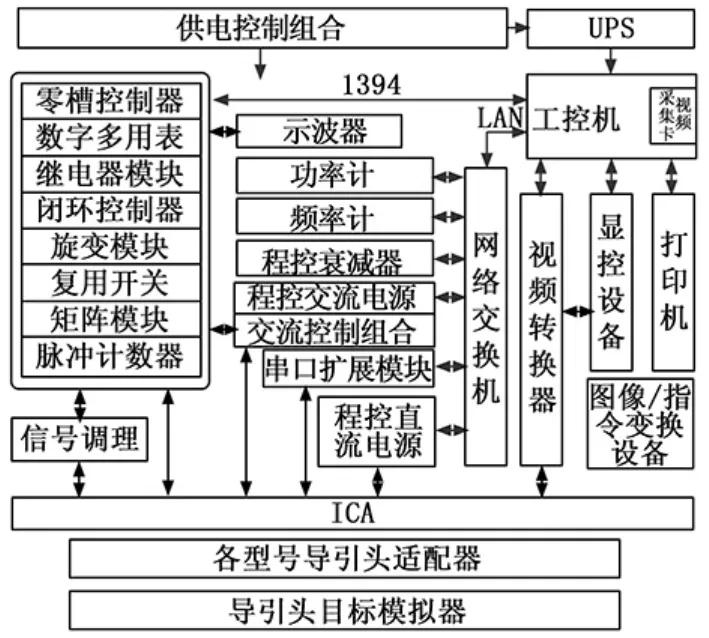
图3 通用测试平台的组成
ICA为设备测试资源按照一定规则分类排布的对外接口,测试资源不直接与被测对象相连而是通过测试适配器对资源进行调理、再分配后连接至不同的被测对象,实现了资源最优化分配。ICA采用航天测控公司自研的SCA-8000A接口适配装置其结构如图4所示。
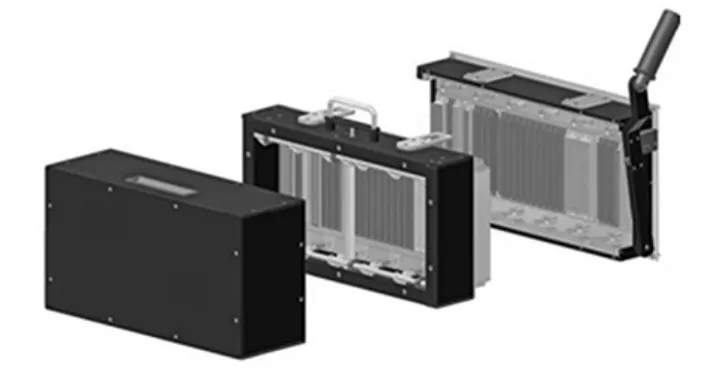
图4 测试对接结构示意图
测试接口[3]的标准化也使得测试设备间的测试一致性提高,便于实现测试系统间的互操作,及测试对象的扩展,从结构和功能上保证扩展性。
3 测试设备工作原理
3.1 导引头供电
测试设备集成多路程控直流电源和中频电源,工控机通过局域网网络控制各台式电源输出或读取实时电压电流等数据。
多路程控直流电源主要用于导引头供电、设备指令系统供电、适配器内部调理电路供电等,各电源模块输出相互隔离且具有防倒灌保护,可进行两路或多路并联对外供电并自主进行均流操作。
中频电源包括36 V/400 Hz、36 V/1000 Hz和115 V/1000 Hz电源,中频电源用于导引头陀螺、旋变模块和预热系统等供电,考虑测试中可能会用到两路同一电压/频率的中频电源,设计交流控制组合实现每台中频电源的一分二输出,每路输出配置输出接触器做物理隔离,接触器之后通过交流电流传感器监测每路输出的实时电流。
3.2 基本电量测量
设备采用数字多用表作为没有实时性要求当精度要求高的静态模拟量采集设备,采集的模拟量主要包括直流电压、电流、电阻、频率等基础物理量,如二次电源产生的直流电压、电流、交流电压、电流、频率以及导通电阻等信号量。实时性较高的模拟信号采用内置于闭环控制器的并行AD卡实现。
电视导引头基础电量采集数量较多,部分型号基础电量达200多路,因此测试设备采用多块复用开关来切换信号通道,设备配4块64选1复用开关实现多达256路模拟信号输入通道,被测信号经复用开关切换后首先进入信号调理设备经过量程变换、信号隔离后再经继电器开关切换送入数字多用表或并行AD。
3.3 时序信号测量
导引头中指令信号脉冲间隔测量、数字信号脉宽及周期测量、数字信号组时序测量采用测控公司自研计时计数模块AMC2314实现。计时计数模块具备时间间隔、脉冲宽度、脉冲技术等测量功能。根据被测信号性质的不同,将被测信号划分为低频及高频两类信号,高频信号在测试适配器内作隔离衰减等调理,低频信号在适配器内做衰减后在信号调理设备内再做隔离,两种信号各分配4个信号通道。
3.4 指令信号发生
导引头测试中用到的指令信号有两种形式:一种是简单的直流电平信号;另一种由飞行设备上指令接收机对远程高频指令解调后的脉冲指令信号。
直流电平信号指令在导引头中以5 V及27 V电平为主用于内部焦距切换、目标锁定等操作,设备采用程控电源和C型继电器模块产生。
脉冲指令信号为机载吊舱设备对导引头发出的高频控制指令信号[4],在系统调试时监测指令接收机输出脉冲,对其进行人工分析、解码、归纳后形成指令表,针对特定导引头型号设计专用指令脉冲发生电路[5],指令脉冲发生电路由通讯接口电路、指令解析电路、时序发生电路、脉冲调制电路、功率放大电路组成。指令解析电路用于指令表中脉冲编码的代号解析并生成对应的数据,时序发生电路将生成的数据按特殊规则生成序列编码,脉冲调制电路将序列编码调制成可发射的窄脉冲信号,最后功率放大电路将窄脉冲信号进行放大并做输出阻抗匹配。脉冲指令发生电路可设置输出脉冲的功率大小从而对导引头指令接收系统进行灵敏度测试。
3.5 角度信号测量与导引头闭环控制
导引头测试过程中需要给定及采集摄像头的偏转角度,不同型号导引头的摄像头偏转角度测量方式不同,主要为电位传感器和旋转变压器两种测量方式,电位传感器输出模拟电压或电流值,而旋转变压器则输出幅度变换的交流信号。测量电位传感器测量的角度信号时采用闭环控制器内置的AD板卡做实时信号采样;测量旋转变压器输出的角度信号则采用专用旋变模块采集,旋变模块直接将旋转变压器模块输出信号转换成数字信号,以IO口形式输出给闭环控制器内置的IO板卡。
设备采用闭环控制器作导引头在线控制用,闭环控制器模块集成DSP可以快速处理数据实现高效的闭环控制算法,在DSP的控制下可以同时控制多达8组闭环回路。各控制回路以PID算法为缺省控制算法[6],用户也可以自定义算法,各回路算法以文件形式下发到控制器,并在DSP内实时运行,避免了上位机软件控制实时性低的弱点。
3.6 图像处理与显示
部分型号导引头输出图像为非标准模拟视频信号,图像信号由于扫描与调制方式特殊,在特定工作阶段会产生幅值较大的脉冲干扰[7],无法用现有图像采集设备进行采集,设计图像指令变换装置将导引头输出的原始图像信号进行调理,并按行场扫描周期产生与之对应的同步信号,并将同步信号与调理过的图像信号送入PXI图像采集卡[8],在测试软件中对图像进行翻转与镜像处理后显示。
设备兼顾图像发射机测试,以工控机副屏图像为源,经视频转换器将VGA信号转换为标准PAL信号,输出给图像发射机,图像发射机将源图像调制为超高频信号经波导管送入设备上程控衰减器,衰减后的高频信号通过图像指令变换装置下变频为图像信号再由图像采集卡采集,实现对图像发射机的图像调制功能测试。
3.7 目标模拟
目标模拟器[9]用于模拟导引头目标对象,分为静态和动态目标模拟器。测试设备配备多种型号的静态目标模拟器及通用动态目标模拟器。
静态目标模拟器通常以平行光套筒的形式照在导引头摄像管前端,目标模拟器内部具有专用光源,光源点亮后经光学聚焦系统使光线汇聚后照射在白光面板上,白光面板发出白色均匀光线,照射在蚀刻了目标图形的通光板上,通光板产生十字靶标的线条与图标,经物镜后就成为模拟的、日光下的无穷的目标输出给导引头摄像管进行静态目标测试。
动态目标模拟器与静态目标模拟器原理类似,利用液晶板代替目标通光板,且物镜视场可变。液晶板可在视频驱动器作用下产生动态目标,目标可通过软件生成各种场景中运动视角下的建筑、车辆、船只等。通过物镜的视场变换实现导引头光学系统近焦与远焦切换时视场配合。动态目标模拟器接收导引头输出的姿态控制信号 (经综控机解算)形成闭环实时调整目标在视场中的位置,导引头锁定目标后始终跟踪目标实现导引头在线动态测试。
4 设备软件平台介绍
电视导引头综合测试设备软件平台采用航天测控技术有限公司自主研制的VITE(Vitual Instruments Test Environmemt)——虚拟仪器测试环境[10],它是一套面向大型自动化测试系统的通用测试程序开发、运行和系统集成平台。该应该用环境为以S-R(激励-响应)模式工作的测试过程提供了一个通用、完备的系统解决方案。
VITE软件平台包括仪器管理模块、TPS开发模块、测试执行模块、数据分析管理、测试程序发布工具测试驱动程序、主控与客户端程序等功能模块。仪器管理模块用于对悬浮导向控制试验台的测试仪器管理资源进行管理和处理,配置试验台系统中的测试仪器资源;测试程序开发模块可以完成对各个测试台的测试程序开发工作,将测试执行的过程、测试动作、状态监控信息进行定义并生成至测试程序文件;测试执行模块实现流程的执行与测试状态监控;数据分析管理模块对测试结果数据进行存储、显示与分析功能,以标准规范的格式进行存储供用户查阅和导出;测试程序发布工具实现各个测试程序的打包发布功能,发布后的测试程序内容对外不可见,程序主要提供测试执行和测试结果查看,实现独立运行的测试程序功能;测试程序驱动完成试验台中测试资源、测试仪器模块、控制模块等模块的驱动开发与程序控制,可在测试仪器管理中进行管理;主控与客户端程序分别对系统侧主控程序和客户端程序进行控制与运行,实现主控平台与各试验台中客户端的信息交互,完成系统级测试流程的测试执行,获取系统运行状态与测试结果数据。
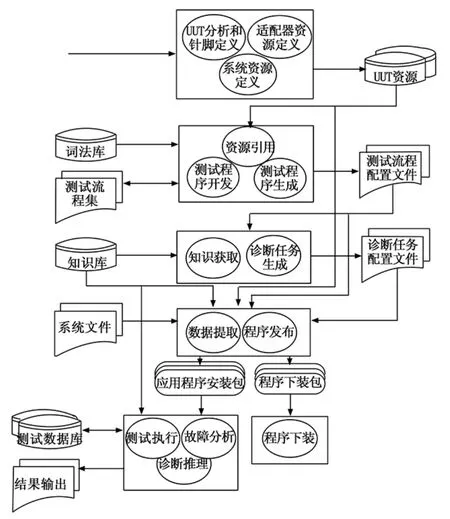
图5 测试程序开发与测试执行软件平台体系结构
VITE软件主要针对大型自动化设备在研制、维修过程中的测试程序自动生成要求,采用了虚拟仪器技术、虚拟系统和系统建模技术、语法定义和分析技术、测控网络技术、IVI技术等关键技术,最终研制开发出适应大型自动化设备杂测试需求的测试程序。软件平台具备系统设备配置、测试流程开发、测试任务开发、测试执行管理、数据报表管理等主要功能。主要技术指标有自动开发向导、界面管理、日志管理及程序自动生成等,达到国内通用测试软件的领先水平。
5 关键技术
5.1 导引头控制技术
现代电视导引头大多装有陀螺稳定平台,该平台的闭环控制比较复杂,且不同厂家的控制原理及算法各不相同。开发人员从各型导引头控制信号的特点、反馈信号的特征总结各类控制的激励响应信号特征,使该设备满足各类控制要求。由于导引头的控制具有高实时性要求,硬件设备具有实时闭环功能,提供PID、自适应等多种经典控制算法和模糊逻辑[11]、神经元等多种现代控制算法,同时可根据具体要求,下载自编的最优算法。
5.2 导引头控制、信号处理算法
各型号导引头控制算法各不相同,在分析研究各型号导引头结构、电路基础上研制开发了各型号导引头控制算法,满足多种型号导引头控制需求。
5.3 故障诊断算法
研制开发适合各型号光学导引头诊断维修的故障诊断算法,建立诊断专家库,在软件设计时采用故障诊断专家系统,将平时实装操作训练发现的故障输入故障库,建立链接资源共享,使导引头的故障定位达到板级甚至器件级。具体设备实施中基于故障树和分层的故障诊断方法根据被测导引头的类型和特点采用有针对性的诊断方法。对于诊断知识库,包括导引头各独立板件的故障知识、正常知识,独立板件知识库可增加、修改、删除及优化知识节点。推理机采用基于普通推理、神经元网络、模糊逻辑结合的综合智能推理机,即可提高诊断推理速度,同时也可以提高故障隔离的精度。
6 结束语
该测试设备以多种型号电视导引头为主要研究对象,运用VXI、LAN等多总线技术以及虚拟仪器、专家系统技术,在对导引头机电部件进行详细分析的基础上,构建了设备的通用硬件平台,建立了诊断专家库,开发出了电视导引头综合测试设备。经用户验收后长期使用,该设备综合性强、稳定性好、准确率高,实现了多种型号电视导引头的独立测试、指标检定、故障定位,极大的提高了技术人员对电视导引头的维修与保障能力。
