新型光学对中自动测量装置的设计
2018-09-19张永超赵录怀谭仕强
张永超,赵录怀,谭仕强
(1.西安交通大学城市学院,西安 710018;2.西安交通大学电气学院,西安 710018)
0 引言
当吊车转运存放大型物品的箱体模块时,吊具与箱体对中情况决定着箱体能否安全转运。在进行对中作业时,主要的方法有:人工粗瞄法、垂球对中法、光学对中器对中法。当要求测量精度高时,采用光学对中器对中法[12]。
有文献提出,光学对中器的图像传感器采用面阵电荷耦合器件[3](Charge CoupLED Device,CCD) 或黑白线阵CCD。面阵CCD和线阵CCD相比,缺点是像元总数多,而每行的像元数一般较线阵少,帧幅率受到限制,而且视场不够,如果采用视场较大的面阵CCD,不仅价格高昂,而且帧频不能满足实时测量的需要。同时,由于生产技术的制约,单个面阵CCD的面积很难达到一般工业测量对视场的需求[4]。黑白线阵CCD同彩色线阵CCD相比计较,在露天环境下,反射光等强干扰时,黑白线阵CCD不能区分有用目标信号和干扰信号,使得转运工作不可靠。彩色线阵CCD同面阵CCD和黑白线阵CCD比较都具有优越性。同面阵CCD比较,彩色线阵CCD的优点在于结构简单,扫描速度快,分辨率高,而且价格低廉[5]。同黑白线阵CCD比较,其优点是当转运的环境光照强度大时,彩色CCD获得图像的比黑白CCD获得的图像要更加清晰,光线的强弱对彩色线阵CCD的影响较小,同时,该CCD驱动时序关系更精确,采样速率更快,抗干扰性能更好、输出信号更稳定等优点[6]。
本文主要针对面阵CCD和黑白线阵CCD的不足,以及其他缺点,设计了一种基于彩色线阵CCD的光学对中自动测量装置,使得对中的精度更高,转运更安全。
1 测量装置组成
测量装置由“N”字形自发光目标、光学镜头、彩色线阵CCD、处理电路、FPGA和电源模块组成,用于测量目标中心位置偏离的坐标距离。测量装置组成如图1所示。

图1 测量装置组成
N型自发光目标发红光,光学镜头将N型目标成像到彩色线阵CCD靶面上,彩色线阵CCD将光学图像转换为模拟信号,模拟信号经放大、滤波、模数转换等处理电路后,再将信号传输给FPGA进行偏移量的计算,最后输出。
1.1 N型自发光目标
N型自发光目标的制作采用超高亮度LED。超高亮度LED具有长寿命、高发光效率、高电流密度和高亮度的特点。超高亮度LED是一种采用新型封装结构的面发光光源,和普通的大功率LED相比具有更高的亮度[7],因此N型采用超高亮度LED制作。根据某型号导弹箱体模块稳妥、安全、转运的技术要求,设定其尺寸为50 mm×110 mm,在长方向上预留尺寸为5 mm,N字形中间线与边线的角度值设置为α=13°,N型斜边与竖边相交的位置间距为5 mm,N字型的线宽为5 mm。当对中器中心处于测量范围最左边时,如图2所示。其最大视场为2×75 mm=150 mm,预留余量为5 mm,则最终光学系统的视场2×80 mm=160 mm。据此,对中器实际能够达到的测量范围应为110 mm×160 mm。
1.2 光学镜头
1.2.1 放大倍率的确定
光学镜头的作用不仅满足将N型自发光目标成像到CCD的要求,还需保证成像到CCD上的光学图像的大小不能超过CCD接收图像的范围,所以放大倍率是一个非常重要的物理量。

图2 N型自发光目标
由图2可知,在设计N型自发光目标的三条线段中,每条线段的大小是5 mm,光学图像到N型自发光目标的距离是900 mm,假设N型自发光目标的三条线段成像到在CCD中,占据的像元的数量分别为36个、24个和15个,每个像元的宽度为4 μm,给根据垂轴放大倍率公式[8]:

式中,l'为像距;l为物距;y'为像高;y为物高。
代入数据,求得放大倍率为:
β3比较三个放大倍率,结合实际情况,本系统采用放大倍率β=0.0288的光学透镜。
1.2.2 焦距的确定
N型的竖线与斜线的距离为5 mm,如图2所示,当工作距离为900 mm,放大倍率β=0.0288时,5 mm在CCD上占据的像元为42个。因此,光学系统的成像光斑不大于42×4 μm=168 μm。
当工作距离为900 mm,放大倍率为0.0192时,根据式1,得出像高:

因为物高y=5 mm,放大倍率β=0.0192根据式1,得出像距:

根据高斯公式:

代入数据,可知焦距:

1.2.3 像方视场角的确定
根据像方视场角的计算公式[8]:

代入l'=900 mm,求得视场角w'=5.9°。
1.2.4 分辨率
在本设计中,焦距f'=26.69 mm,像方视场角w=5.9°,则像高y'=-f'tan珔w=-2.77 mm。选择三通道单边输出二相驱动的线阵CCD器件,每个通道共有5340个光敏元,像元尺寸为4 μm×4 μm的线阵CCD,则远距时分辨率可达(275×0.004)/(2×2.77)=0.20 mm/像元。
1.3 彩色线阵CCD
ILX558K是日本SONY公司生产的具有较好的分辨率和性能品质,在价格上也有优势。本设计选用ILX558K作为彩色线阵CCD传感器,保证具有较高的釆样速率及精度,还可以实现三通道RGB同时输出[10]。
ILX558K每个通道共有5340个光敏元,具有三通道单边输出二相驱动的线阵CCD器件。对于RGB中的任何一个通道来说,光敏元直接与每个移位寄存器相连接,且移位寄存器的像素数量与光敏元数量相等。内部结构示意图如图3所示。ILX558K直流12 V电源供电。
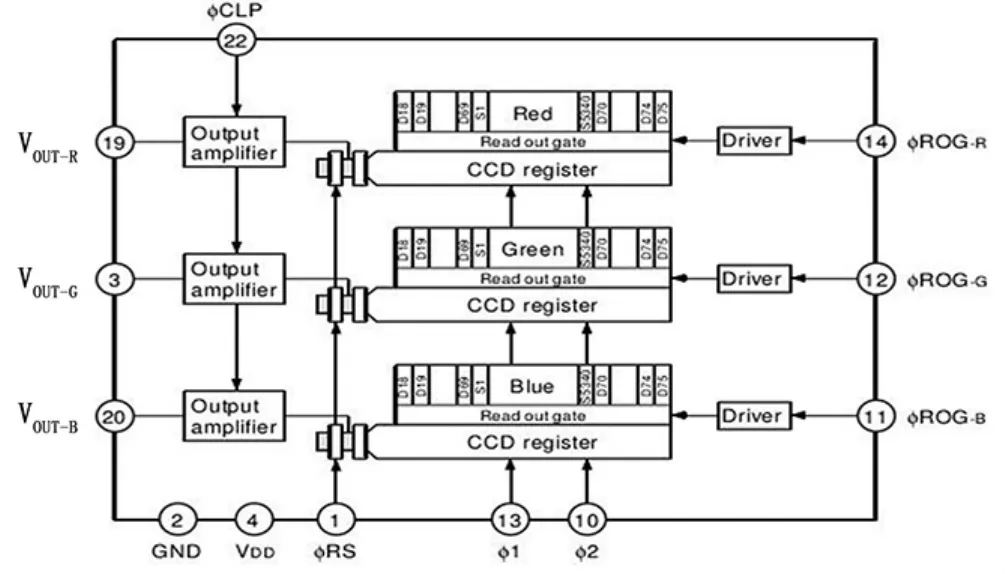
图3 ILX558K结构示意图
1.4 信号处理电路
信号处理电路实现的三个功能有:①模拟信号处理,主要完成彩色线阵CCD输出信号的放大、滤波和A/D转换;②数字信号处理,主要完成数字信号滤波以及三个像点的偏移量计算;③发送数据,主要将计算所得的偏移量输出。
1.5 信号处理器
本设计使用CycloneⅡ系列的FPGA,它是ALTERA公司生产的,它具有彩色线阵CCD驱动、CCD数字信号处理及偏移量计算等功能。优点是:新增加了嵌入式乘法器,DSP处理能力得到了很大的加强;支持DDR2内存的高速存储器接口和高速差分接口,高速差分接口其LVDS;可以达到622 Mbit/s发送端数据速率,可以达到805 Mbit/s接收端数据速率,集成更大的片上存储器;CYCLONEⅡ系列FPGA有关时钟资源部分主要包括全局时钟树和锁相环两部分。
本设计选用CYCLONEⅡ系列型号为EP2C8T144C8的芯片。EP2C8采用3.3 V外部供电,采用1.2 V电压内核供电,采用TQFP44封装形式。
1.6 电源模块
FPGA内核电压、I/O电压、内部锁相环电压和CCD图像传感器电压,分别是1.2 V、3.3 V、模拟1.2 V和模拟12 V,运算放大器正常工作所需电压为正负12 V,模数转换器正常工作电压为模拟5 V、数字5 V;晶振、FPGA配置芯片等均可采用3.3 V供电。
2 测量原理
根据系统测量原理,结合光学对中原理图,如图4(a)所示,采用靶面板上刻画N字形目标的方法,如图4(b),N字形发射红光,靶面N字形周围涂成黑色,以增加目标与背景的对比度。由于光学系统视场范围大于靶面,为了便于安装,靶面的大小需要恰当,因此靶面周围的自然光反射也会在彩色CCD上成像。采用彩色线阵CCD,N字形目标与反射干扰光在红色感光区成像,CCD同帧输出信号如图5所示,1、2、3表示N型自发光目标成像,如图5(a),如图5(b)所示,4表示干扰光成像,如图5(c)所示,因此根据三色成像的区别就可以在有干扰光的情况下,提取有效的目标图像,计算测量结果,提高系统的可靠性。为了确认彩色线阵CCD比黑白线阵CCD性能优越,本课题进行了实验验证,绿色感光的波形图如图6所示,红色感光的波形图如图7所示,通过比较两个信号,去掉干扰光,可以计算X、Y轴坐标。因此,可以得出结论彩色线阵CCD比黑白线阵CCD抗干扰能力更强。

图4 光学对中原理图
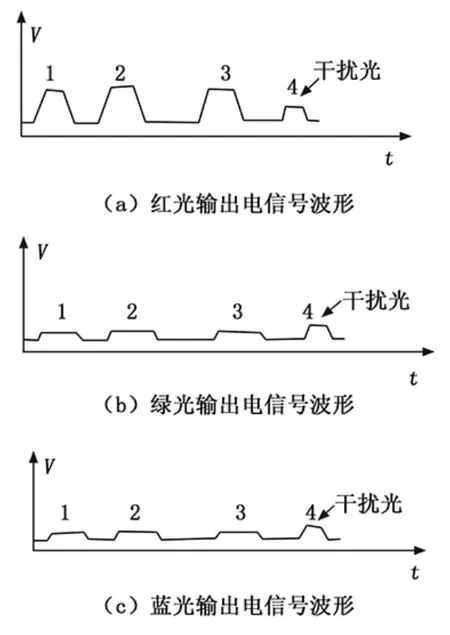
图5 CCD同帧输出信号示意图

图6 绿色感光输出波形图
结合图4和图8坐标位置计算图推算出X轴、Y轴位置坐标,根据波峰1和波峰3在CCD中的位置,可以计算物像比例当量:
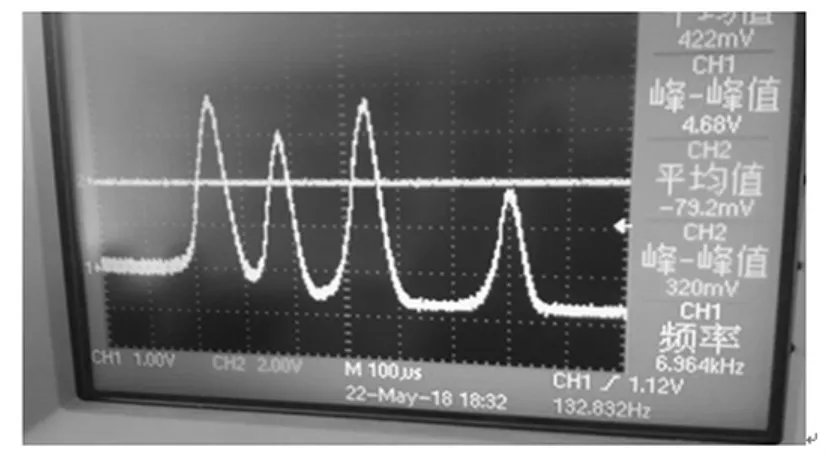
图7 红色感光输出波形图
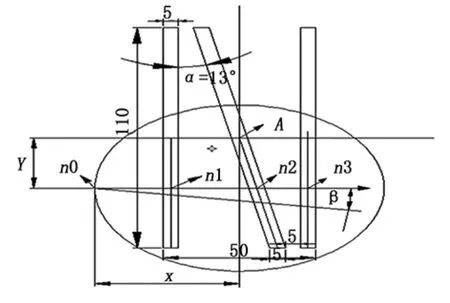
图8 坐标位置计算图

该当量的物理含义是线阵CCD上的每一个像元对应在合作目标即物面的尺寸大小,单位为 mm/pixel。则正常情况下可得出位置偏移量:
X 方向:d×x(mm) Y 方向:d×y(mm)
根据1、3号波峰的中点在CCD上的绝对像元数,结合物象比例当量,可以计算得到靶面中点相对光学接收镜头光轴Ⅹ方向的坐标。

根据X方向坐标和1、2、3号波峰在CCD上的绝对值,可以得到靶面中点相对镜头光轴Y方向的坐标。

式中,n1、n2、n3分别代表波峰1、2、3位置的绝对像元素,n0代表激光光斑在CCD上的起始像元素,α=13°为“N”字型中间线与边线的角度值。
3 实验与分析
3.1 N字精度实验测量
进行N字形精度实验测量的实验步骤如下图所示,首先光经过光学系统成像后,通过数字示波器能够找到信号,在调整CCD的位置,使得CCD刚好处于成像的位置,再进行N字形X轴和Y轴精度的实验测量,实验框图,如图9所示。

图9 N字形实验框图
该测量实验当中,测量的范围为±50 mm,利用平行导轨的移动表示X轴方向的变化,其中平移导轨坐标为标准值,重心算法换算值为测量值。利用升降架方向的移动表示Y轴方向的变化,其中升降架坐标为标准值,重心算法换算值为测量值。偏差是标准值和测量值之间的误差,极差表示重心算法测量的最大误的绝对值,标准差表示重心算法测量的标准方差。图像传感器采用彩色线阵CCD时,进行N字精度实验测量,对所测量的数据进行处理得表1,表1为X轴和Y轴数据处理后的极差和标准差。

表1 X轴和Y轴数据处理后的极差和标准差
通过实验测量,以及数据处理,和文献 [11]比对得出结论,采用彩色线阵CCD作为图像传感器时,测出的N字进度更高,误差更小,使得对中更加的精确,转运更加安全。
3.2 误差分析与测量结论
测量值和真实值的偏差是测量的精度,测量的精度反应了整个系统的测量的能力[11]。该光电对中器主要由光学系统部分和信号处理部分组成。因此,在本设计当中,组成系统的误差主要由光学系统误差和信号处理部分误差组成。
针对本设计的光电对中器,误差主要由①原理误差,②A/D量化误差,③环境误差,④倾斜引起测量误差,⑤旋转引起测量误差,⑥测量仪器误差,⑦电子线路噪声对其的影响,⑧光学系统畸变造成的误差组成。
4 结语
1)本文设计了一种基于彩色线阵CCD的光学对中自动测量装置,该图像传感器具有结构简单,扫描速度快,分辨率高,误差小;
2)当环境光照强度大时,该图像传感器获得的图像更加清晰,环境光线的强弱对该图像传感器影响较小。同时,该CCD驱动时序关系更精确,采样速率更快,抗干扰性能更好、输出信号更稳定;
3)本设计采用N型自发光目标图案进行二维坐标测量,整个系统的结构简单,干扰信号减少,测量误差减小。
