GNSS在线PPP数据处理系统性能分析
2018-09-03周要宗匡翠林刘紫平何芮瑶
周要宗,匡翠林,刘紫平,何芮瑶
(1.中南大学 地球科学与信息物理学院,长沙 410083;2.湖南省测绘科技研究所,长沙 410007)
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)高精度数据处理需高精度数据处理软件作支撑。常用的高精度数据处理软件BERNESE、GAMIT、EPOS、GIPSY、NAPEOS和PANDA等需引入多项改正[1],操作难度大,要求数据处理人员掌握扎实的专业知识,这使得GNSS高精度数据处理在科研领域应用广泛,而工程领域望而却步。随着计算机技术和互联网技术的高速发展[2],信息和成果共享越来越方便,GNSS在线数据处理系统应运而生。GNSS在线数据处理系统是互联网+高精度数据处理的产物,它的出现打破了高精度数据处理软件对高精度数据处理应用的限制。GNSS在线数据处理系统只需用户通过WEB页面或文件传输协议(file transfer protocol,FTP)服务器上传待解算观测文件,系统后台会自动进行高精度数据处理,并通过E-mail将解算结果发送到用户邮箱,操作简单、方便快捷[3]。国外已经有多个较成熟的GNSS在线数据处理系统,可以按照数据处理模式的不同对其进行归类,结果如表1所示。

表1 现有GNSS在线数据处理系统归类[4-6]
已有不少学者对GNSS在线数据处理系统的稳定性、可操作性、适宜条件及数据处理结果的精度和可靠性进行了分析[7-9]。近些年随着GNSS高精度数据处理技术的快速发展,各GNSS在线数据处理系统都有不同程度的升级,定位性能显著提高[10];有必要重新评估现有GNSS在线数据处理系统的性能。
本文选取18个全球均匀分布的国际GNSS服务(International GNSS Service,IGS)站的GNSS观测数据,对4个常用的GNSS在线精密单点定位(precise point positioning,PPP)数据处理系统APPS、CSRS-PPP、GAPS和magicGNSS的性能进行评估。
1 4个GNSS在线PPP数据处理系统
目前国内外常用的GNSS在线PPP数据处理系统主要有4个,分别是APPS、CSRS-PPP、GAPS和magicGNSS。这4个系统都可免费向全球用户提供动静态位置服务,具体每个系统的概况和特点如下[11-14]:
自动精密定位服务(automatic precise positioning service,APPS)是由美国喷气动力实验室(Jet Propulsion Laboratory,JPL)开发的一个全球定位系统(global positioning system,GPS)在线PPP数据处理系统。该系统后台软件平台为GIPSY 6.4,采用JPL提供的一些国际最先进的GPS定位技术,支持RINEX2、RINEX2.11输入文件和GIPSY TDP文件,可对GPS接收机进行实时或事后高精度动态或静态定位。APPS系统对用户注册无明确要求,注册用户可进行静态和动态定位,未注册用户只能进行静态定位。APPS系统允许用户通过WEB界面、E-mail或FTP服务器上传采样率低于1 s的观测文件,解算结果包括国际地球参考框架(international terrestrial reference frame,ITRF)2008坐标文件、GIPSY解算文件和其他辅助文件。
加拿大空间参考PPP系统(Canadian spatial reference system-PPP,CSRS-PPP)是加拿大国有资源部大地测量司提供的GNSS在线PPP数据处理系统,目前支持双卫星系统和单双频数据处理,可处理GPS和俄罗斯格洛纳斯(global navigation satellite system,GLONASS)数据。该系统后台软件平台为CSRS-PPP V1.05,要求用户注册,对RINEX文件版本无明确限制,用户只须提交RINEX文件或其压缩格式文件,选择数据处理方式和坐标参考框架,提供E-mail地址即可,系统会自动把解算结果反馈给用户。系统解算结果包括北美基准(North American datum,NAD)1983或ITRF坐标及精度、整周模糊度、接收机钟差估计信息、对流层延迟和载波相位残差信息等。
GPS分析与定位软件(GPS analysis and positioning software,GAPS)是由加拿大新伯伦瑞克大学研发的1个GNSS在线PPP数据处理系统,目前支持3个卫星系统的数据处理,这些GNSS系统包括北斗卫星导航系统(BeiDou navigation satellite system,BDS)、GPS及伽利略卫星导航系统(Galileo navigation satellite system,Galileo)。该系统后台软件平台为GAPS V6.0.0,无需用户注册,支持REINEX2和REINEX3格式观测文件,定位解算结果参考框架可在ITRF和欧洲地球参考框架(European terrestrial reference frame,ETRF)之间选择。除定位服务外,该系统也可为用户提供电离层延迟、接收机钟差、多路径误差等方面的服务。
magic精密单点定位解算服务(magic precise point positioning solution,magicGNSS)是由西班牙GMV公司维护的一个GNSS在线PPP数据处理系统,目前支持GPS、GLONASS及Galileo系统数据处理。该系统后台软件平台为NAPEOS,需用户注册,支持RINEX2和RINEX3格式观测数据,用户需通过E-mail上传解算文件,解算结果包括ITRF08坐标、天顶对流层延迟(zenith tropospheric delays,ZTD)、接收机钟差和载波相位残差信息等。
2 在线PPP系统动态定位精度评估
选取湖北武汉JFNG站2017年年积日第90天、采样率为30 s的GNSS观测数据,分别提交至APPS、CSRS-PPP、GAPS和magicGNSS系统进行动态定位解算,得到各系统JFNG站三维坐标时间序列。为更直观地表达结果,将各系统解算坐标与IGS参考值求差,并将差值转换至N(北)、E(东)、U(高程)方向进行对比,结果如图1和表2所示。图1中,APPS和magicGNSS系统解算间隔为300 s,CSRS-PPP和GAPS系统解算间隔为30 s;APPS系统要求待上传观测文件小于10 MB,因此只上传了22 h的观测文件;GAPS系统动态定位有明显收敛时间,收敛时间约为40 min,其他3个系统采用前后双向滤波算法,没有明显收敛时间,GAPS系统动态定位结果均方根(root mean square,RMS)指的是收敛后计算得到的RMS。

表2 4个在线PPP系统动态定位偏差RMS对比 cm

图1 4个在线PPP系统动态定位偏差对比
由图1和表2可知,4个在线PPP系统动态定位偏差在厘米量级,N方向和E方向偏差明显小于U方向。4个在线PPP系统动态定位偏差有所不同,CSRS-PPP系统N方向定位偏差RMS最小,约为0.89 cm;APPS系统E方向定位偏差RMS最小,约为1.03 cm;GAPS系统U方向定位偏差RMS最小,约为2.37 cm。
3 在线PPP系统静态定位性能分析
3.1 时段长度对4个在线PPP系统静态定位的影响
利用GFZRNX软件将JFNG站2017年年积日第90天的GNSS数据分割成1、2、…、24 h的时段观测数据,分别上传至4个在线PPP系统进行解算,以分析时段长度对4个在线PPP系统静态定位的影响,得到如图2所示的结果。图2中,APPS系统所上传时段观测数据的最大时段长度为22 h。

图2 时段长度对4个在线PPP系统静态定位影响的对比
由图2可知:时段长度从0增加到2 h时,4个在线PPP系统静态定位偏差均明显变小;时段长度大于2 h后,4个在线PPP系统静态定位偏差逐渐趋于稳定;尤其当时段长度大于等于12 h后,4个在线PPP系统静态定位偏差几乎保持不变,N方向约为0~2 cm,E方向约为0~1.5 cm,U方向最差,约为0~3.5 cm。同时,各PPP在线系统静态定位偏差之间存在差异性,APPS和CSRS-PPP系统N方向定位偏差相对较小,约为0~1 cm;APPS和magicGNSS系统E方向定位偏差相对较小,约为0~1 cm;CSRS-PPP和GAPS系统U方向定位偏差相对较小,约为0~1.5 cm。
3.2 4个在线PPP系统静态定位结果对比
选取18个全球均匀分布IGS站点2017年年积日第90天的GNSS数据,并从IGS获取各站点坐标参考值,所选站点分布如图3所示。
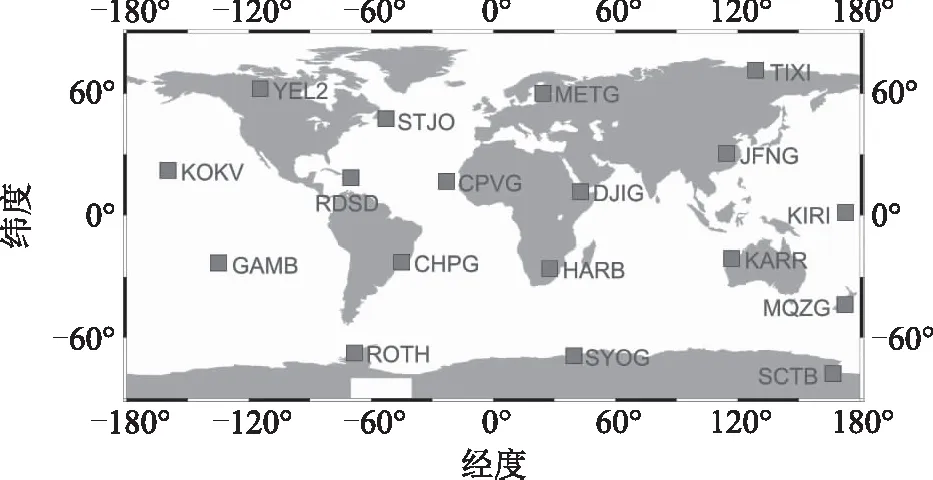
图3 实验数据站点分布
图3中横轴表示经度,纵轴表示纬度。用GFZRNX软件将各站点单天数据切分成前12 和后12 h 2段,分别提交各选定站点前12和后12 h数据至4个在线PPP系统进行静态定位解算,得到各在线系统前、后12 h静态定位解算坐标。通过比较前12 h解算坐标与坐标参考值之差来分析4个PPP在线系统静态定位的精度,分析结果如图4所示。通过对比前、后12 h解算坐标之差来评估4个PPP在线系统静态定位的稳定性,对比结果如图5所示。
图4中,测站点填充颜色表示4个在线PPP系统静态定位U方向偏差的大小,箭头长度代表N、E方向偏差大小,每幅子图左下角3个箭头分别表示N、E方向偏差为15、10和5 mm,可以依此确定各测站N、E方向偏差的具体数值。图4结果表明,不同在线系统、不同测站的静态定位结果存在明显差异,CSRS-PPP系统静态定位N、E方向偏差最小,APPS系统静态定位U方向偏差最小,GAPS和magicGNSS系统静态定位偏差相对较大。APPS系统所有站点静态定位N、E方向偏差小于2,U方向偏差小于1.5 cm,整体静态定位结果最好;CSRS-PPP系统所有站点静态定位N、E方向偏差小于1.5,绝大多数测站(除SCTB站)U方向偏差小于2 cm,整体静态定位结果稍次于APPS;GAPS系统静态定位偏差与测站地理纬度相关,近极地或极地区域测站(YEL2、METG、TIXI、SYOG、SCTB)定位偏差相对较大,N、E方向最大超过8,U方向最大可达5.6 cm,而中低纬度区域测站定位偏差相对较小,N、E方向小于2,U方向小于3 cm;magicGNSS系统多数测站静态定位偏差偏大,N、E方向约为1~3,U方向约为1~4 cm,整体静态定位结果相对较差。

图4 4个在线PPP系统静态定位结果比较

图5 4个在线PPP系统静态定位稳定性比较
图5结果表明,不同在线系统、不同测站静态定位稳定性有所不同。CSRS-PPP系统静态定位稳定性偏差最小,约为0~2 cm;APPS系统静态定位稳定性偏差次之,大小约为0~3 cm;magicGNSS系统静态定位稳定性偏差较大,最大可达4.5 cm;GAPS系统静态定位稳定性偏差最大,达到12 cm。同样值得注意的是,GAPS系统METG、SYOG、TIXI及YEL2站的静态定位稳定性偏差比其他测站明显偏大,而这4个测站都位于极地或近极地区域。
4 结束语
本文介绍了4个常用GNSS在线PPP数据处理系统的发展现状和特点,并通过JFNG站动态定位数据处理,分析了4个PPP在线系统动态定位的精度,最后通过对比处理18个IGS站点的GNSS数据详细探讨了4个在线PPP系统静态定位的精度和稳定性,得出以下结论:
1)4个在线PPP系统动态定位精度为厘米级,N方向和E方向明显优于U方向,APPS和CSRS-PPP系统优于GAPS和magicGNSS系统。
2)时段长度由0增加至2 h时,4个在线PPP系统静态定位精度明显提高,当时段长度大于等于12 h后,4个PPP在线系统静态定位精度几乎保持不变。
3)不同在线系统、不同测站的静态定位结果存在一些差异。APPS系统静态定位结果最好,CSRS-PPP系统静态定位结果稍次,中低纬度区域测站GAPS系统静态定位结果相对较好,magicGNSS系统静态定位结果整体偏差。
4)不同在线系统、不同测站的静态定位稳定性有所不同,CSRS-PPP系统静态定位稳定性最好,APPS系统稍差,magicGNSS系统较差,GAPS系统最差。
综合以上结论,对于有厘米级或毫米级PPP定位需求的用户,建议提交时段长度不小于12 h的GNSS数据至APPS或CSRS-PPP系统进行数据处理。
