高速公路声屏障与隧道壁多功能清洗机的结构设计
2018-09-03韩国武张胜军陈新轩
韩国武,荆 蓓,樊 琪,李 宗,张胜军,陈新轩
(1.陕西省高速公路建设集团西耀分公司,陕西 西安 710065; 2.长安大学 工程机械学院, 陕西 西安 710064)
0 引 言
随着中国高速公路的快速发展,截至2016年底,国内新增高速公路6 000 km,总里程突破13万 km。因中国是多山多丘陵的国家,所以国内高速公路的特点是以桥梁与隧道连线的形式为主,且隧道连线长。
为了降低通过城市住宅区的高架道路上车辆噪音的影响,在高架道路上都设有声屏障。由于行车安全以及美观的需要,要对声屏障、隧道壁面以及遮光板进行清洗。目前国内主流清洗设备,如远东大方隧道清洗车、中联重科ZLJ5160TXQE3隧道清洗车、赫尔茨曼3100隧道清洗车、厦工楚胜(湖北)专用汽车制造有限公司生产的隧道清洗车,都以滚刷式清洗方式为主,且施工场所多以隧道为主,不能进行声屏障等需双面清洗的公路设施的清洗或清洗自动化程度不高。因此研究开发功能齐全的清洗设备具有重大的实际意义。
1 清洗方式
目前可用于隧道与声屏障的清洗方式有3种:高压清洗、干冰清洗和滚刷清洗。
1.1 高压清洗
高压清洗是在高压水射流的基础上发展的清洗方式,其基本原理是:利用高压泵将常压水转换为高压水,再经喷射装置将高压水喷射到隧道壁、护栏及声屏障等待洗物面上。高压水射流经喷射形成高压水帘,具有很大的冲击力,可以正向及切向冲击待洗面的污渍,将污渍先进行软化溶解,再通过高压水帘冲击污渍使其从待洗物表面剥离,从而完成清洗[9-10]。

图1 高压清洗喷架
高压清洗的优点是:清洗装置较为简单,只需利用副发动机带动高压水系统,就能实现高压清洗。而且高压喷架与隧道形状相似,通过隧道时可将隧道墙面全面清洗[11-12]。其喷架如图1所示。
高压清洗的缺点是:高压清洗水射流具有较大的冲击力,易对脆性的清洗面产生严重的破坏,同时高压清洗工作压力很大,增加了清洗作业的危险性;清洗的效果一般、效率较低,一般需要多次清洗才能保证清洗干静;高压清洗的能耗较大,需要较高功率的发动机,增加了整车油耗,提高了清洗成本。
1.2 干冰清洗
干冰清洗的原理是利用干冰的低温性,使待清洗面的污渍因低温而龟裂,再利用干冰喷射到待清洗面的冲击力使污渍剥离,如图2、3所示。
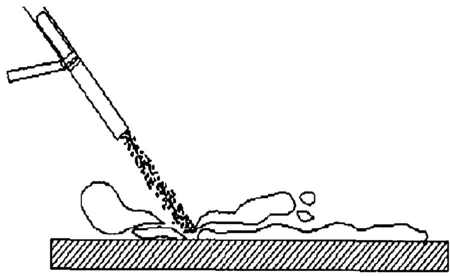
图2 干冰清洗的低温导致污染物龟裂

图3 污染物被干冰微爆剥落
干冰清洗的优点是对环境的污染小、能源耗费低、安全、环保等;缺点是技术难度高、干冰清洗装置结构复杂。
1.3 滚刷清洗
滚刷式清洗是基于人工清洗发展而成的机械式清洗方式。首先,滚刷清洗利用低压水系统将加入清洗剂的低压混合物喷洒到待洗表面,将待洗表面的污渍进行软化及融化,降低污渍附着性;再利用滚刷与清洗面的接触力使污渍从清洗面剥离下来,最后用清水冲洗完毕。
滚刷式清洗的优点是:清洗的效果好、清洗里程长、效率高;清洗过程中所需水量大约是高压清洗车的三分之一;能耗低,清洗成本低。
滚刷式清洗的缺点是:在清洗过程中由于清洗剂等的使用可能对环境会造成污染。
2 多功能清洗机的总体结构
隧道壁与声屏障综合清洗机的工作装置是根据清洗对象结构的不同,分为单刷清洗装置和双刷清洗装置。单刷清洗装置通过液压缸的调节完成不同高度的隧道壁面清洗,同时也可以对声屏障两面分别进行清洗。在同一时刻单刷清洗装置对声屏障的清洗只能进行一面清洗,而双刷可以对声屏障的两面同时清洗。因此,进行单刷与双刷换装可实现对公路隧道壁面的单面清洗与声屏障的单面或双面清洗。单刷隧道壁面与双刷声屏障综合清洗车的总体结构分别如图4、5所示。

图4 公路声屏障与隧道壁多功能清洗机总体结构(单刷)

图5 公路声屏障与隧道壁多功能清洗机总体结构(双刷)
3 多功能清洗机的作业工况
隧道壁面与声屏障清洗车工作装置的强度主要由清洗车工作装置的自重决定,不同的清洗工况使各个铰接点的受力不同。因此,可以根据不同作业工况求得各个铰接点所受的作用力,进而对主要结构件进行强度分析。多功能清洗机的主要作业工况有单刷清洗隧道壁最高位置、最大距离、最低位置,分别如图6~8所示;单刷清洗声屏障背部最低位置,如图9所示;双刷清洗声屏障水平工况、最大距离工况和最近距离工况,分别如图10~12所示。
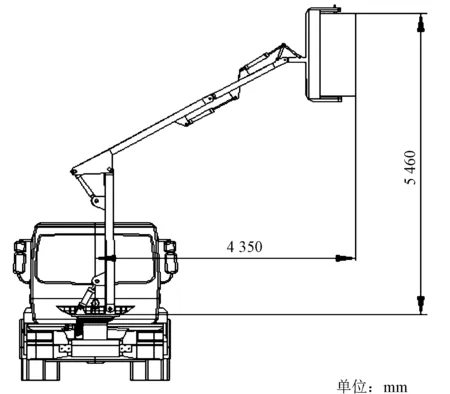
图6 单刷清洗隧道壁最高位置

图7 单刷清洗隧道壁最大距离

图8 单刷清洗隧道壁面最低位置

图9 单刷清洗声屏障背部最低位置

图10 双刷清洗声屏障水平工况

图11 双刷清洗声屏障最大距离工况

图12 双刷清洗声屏障最近距离工况
综上,清洗车不同作业工况清洗参数见表1。
4 最大受力工况下受力分析
单刷及双刷清洗隧道壁在清洗最大距离时,液压缸的受力最大,因此分别对这2种工况进行受力分析。
4.1 单刷清洗隧道壁最大距离时受力分析
当工作装置的液压缸伸出,使得机械臂与地面 成60°夹角,机械臂处于水平状态,同时调节液压缸,使得刷锟与隧道壁面平行,此时清洗车的工作装置处于最大清洗距离。工作装置处于最大清洗距离时的受力如图13所示。
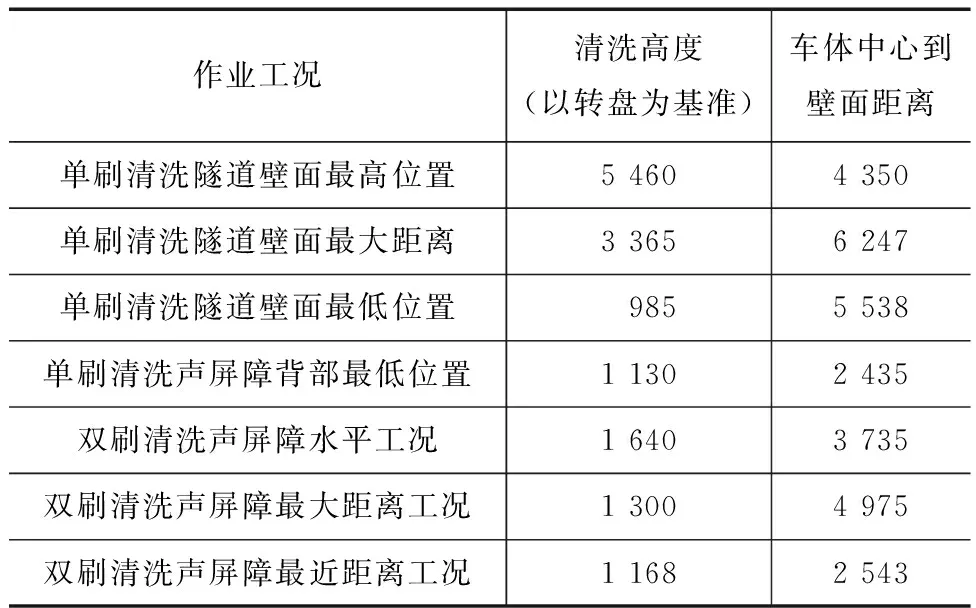
表1 清洗车不同作业工况清洗参数 mm

图13 单刷清洗隧道壁面最大距离
机架平衡方程为
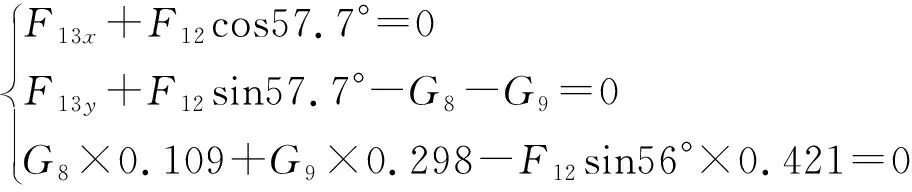
机械臂3的平衡方程为
机械臂2的平衡方程为
机械臂1的平衡方程为
对液压缸4进行受力分析,同理可得
根据以上方程通过Matlab求解可知,连杆2对机架的作用力F11为2 806 N;机械臂3对机架的水平方向的作用力F10x(与计算时假设的方向相反)为1 747 N ;机械臂3对机架的竖直方向的作用力F10y(与计算时假设的方向相反)为1 296 N ;连杆1对机械臂3的作用力F9为2 968 N ;液压缸与机械臂3之间的作用力F8为3 148 N;液压缸对机械臂3的作用力F7为11 494 N;机械臂2对机械臂3的水平作用力F6x为11 498 N;机械臂2对机械臂3的竖直方向的作用力F6x为1 425 N;机械臂1对机械臂2的水平方向的作用力F4x为648 N;竖直方向的作用力F4y为14 474 N;液压缸2对机械臂2的作用力为11 533 N;液压缸1对机械臂1的作用力为29 451 N;转盘对机械臂1的水平作用力F0x(与计算时假设的方向相反)为21 288 N;转盘对机械臂1的竖直方向的作用力F0y为24 897 N。单刷清洗隧道壁面最大距离受力分析计算结果见表2。

表2 单刷清洗隧道壁最大距离受力分析计算结果 N
4.2 双刷清洗声屏障最大距离
隧道壁面与声屏障综合清洗车的双刷清洗装置在液压缸1伸出,使得机械臂1与地面成60°夹角,机械臂2、3处于水平时,双刷清洗装置的清洗半径达到最大。双刷清洗装置处于最大距离时工作装置的受力如图14所示。

图14 双刷清洗声屏障最大距离
左侧滚刷的平衡方程为
右侧滚刷的平衡方程为
机械臂5的平衡方程为
机械臂4的平衡方程为
机械臂3的平衡方程为
机械臂2的平衡方程为
机械臂1的平衡方程为
对液压缸4进行受力分析,同理可得
根据以上方程通过Matlab求解可知,机械臂5 对机架的水平作用力F16x为471 N;机械臂5对机架的竖直方向的作用力F16y为584 N;液压缸6对机架的作用力F15为760 N;液压缸7对机械臂5的作用力F14是3 938 N;机械臂4对机架的水平作用力F13x(与计算时假设的方向相反)为386 N;机械臂4对机架的竖直方向的作用力F13y为569 N;液压缸4对机架的作用力F12为723 N;连杆2对机械臂4的作用力F11(与计算时假设的方向相反)为1 375 N;机械臂3对机架的水平方向的作用力F10x为208 N;机械臂3对机架的竖直方向的作用力F10y(与计算时假设的方向相反)为5 993N;连杆1对机械臂3的作用力F9(与计算时假设的方向相反)为4 207 N;液压缸与机械臂3之间的作用力F8(与计算时假设的方向相反)为2 432 N;液压缸对机械臂3的作用力F7为22 932 N;机械臂2对机械臂3的水平方向的作用力F6x为 22 942 N;机械臂2对机械臂3的竖直方向的作用力F6y为3 373 N;机械臂1对机械臂2的水平方向的作用力F4x为17 830 N;机械臂1对机械臂2竖直方向的作用力F4y为29 155 N;液压缸2对机械臂2的作用力为24 313 N;液压缸1对机械臂1的作用力为54 361 N;转盘对机械臂1的水平作用力F0x(与计算时假设的方向相反)为39 429 N;转盘对机械臂1的竖直方向的作用力F0y为43 917 N。双刷清洗声屏障最远距离受力分析计算结果见表3。

表3 双刷清洗声屏障最远距离受力分析计算结果 N
通过对清洗机不同作业工况下进行静力学分析可知,当综合清洗车处于单刷清洗隧道壁面最大距离时,液压缸1、2、3的作用力最大,分别为2 9451、11 533、11 494 N。当综合清洗车处于单刷清洗声屏障背部最低位置工况时,液压缸4的作用力达到最大,为23 782 N。在该作业工况下,液压缸4的作用力迅速变大。从液压缸4的计算公式可以看出,液压缸4的作用力与角C、D的大小有关,而角C、D与结构尺寸有关,因此可以通过结构尺寸以及铰点位置的优化减小液压缸4的作用力。当综合清洗车处于双刷清洗声屏障最远距离工况时,液压缸1、2、3的作用力最大,分别为54 361、24 313、22 932 N。
5 结 语
(1)对公路声屏障与隧道壁清洗方式进行了分析,并设计了一种采用单刷与双刷自由切换的多功能清洗机。
(2)对多功能清洗机单刷清洗隧道壁时,最高位置、最大距离、最低位置,清洗声屏障背部最低位置,以及双刷清洗声屏障的水平、最大距离、最近距离进行了分析。
(3)对多功能清洗机液压缸1、2、3的受力最大的工况进行分析,为后期的强度校核提供依据。
