基于FPGA的反射式光幕测速系统
2018-08-31柏超龙赵传荣
柏超龙,江 剑,赵传荣
(1.南京理工大学 机械工程学院, 南京 210094; 2.安徽工业大学 电气与信息工程学院, 安徽 马鞍山 243032)
弹丸的速度是研究弹丸战斗部威力效应和分析弹丸飞行规律的重要参数[1]。弹丸速度的测量是新型炮弹装备验收的基本测试项目之一[2],所以对弹丸速度测量方法的研究和发展是非常重要的。目前国内常采用价格低廉和便于后续数据处理的非接触式区截测速法来测量破片速度[3]。对于高速飞行的弹丸的速度测量,按照测量原理通常分为3种,即瞬时速度测量法、平均速度测量法和多普勒原理测量法[4]。对于测量速度在200~2 000 m/s之间、尺寸大小(Φ大于等于20 mm)的弹丸,瞬时速度测量法的误差较大,多普勒测速体积庞大、价格昂贵,两种均不适合设计要求,本研究采用基于激光光幕靶的平均速度测量法。
光幕靶的区截装置大致分为两种,一种是激光器发射装置和接收光电器件阵列分列两边,激光器发出的光直接照射在接收器上,当有物体通过时,由于遮挡而引起接收器光能量的变化而产生触发信号[5];另一种是采用反射式光幕,激光器发射装置和接收装置都在同一侧,激光器发射出的是一个扇形光幕,只有当物体穿过扇形光幕时,物体的反射光信号才会被光电装置接收[6],引起接收器光能量变化而产生触发信号。
本研究提出了反射式激光光幕测速系统,设计光幕靶的发射和接受装置都在同侧,利用高速硅光电传感器接收弹丸穿过激光光幕反射的光[7],转化为电信号作为触发信号。这种机械结构简洁且易于调节,它具有价格低、测量精度高、便于携带和可靠性高等优点[8]。
1 测速原理及系统装置组成
平均速度测量法可以分为定时测距法和定距测时法两种[9]。在本次设计中采用的是定距测时法,即通过测量弹丸飞过一定距离和弹丸飞过这段距离的时间,由下式计算弹丸平均速度的方法。
(1)
在弹丸的路径上预先放置好两个平行光幕靶,固定靶距S,然后记录下弹丸垂直通过前后光幕靶所用的时间T,根据式(1)可以计算出弹丸的飞行速度。
测速原理如图1所示,激光光幕的发射装置和激光信号接收装置在同一侧,前后两光幕成对称结构。弹丸经过一定厚度的扇形光幕时产生反射信号,该信号经过透镜聚焦成一个点状的光斑成像在高速光电探测器上,引起光电效应,将电信号进行传输[10]。记录弹丸通过两激光光幕之间的时间,就获得了弹丸的飞行时间T,即可以求得弹丸的飞行速度。
2 系统设计
2.1 系统组成
本文设计的测速装置由三大部分组成:
1) 光电转换部分。光电转换部分作用是为了更有效地提取反射光信号,由于弹丸的穿过速度较快,反射的激光信号比较弱,在光电探测器的前面加上非球面透镜和窄带滤光片,适当增强有效反射光信号并滤除大部分杂散光。
2) 信号处理部分。信号处理部分是为了将光电探测器转化的电信号,进行一定倍数的放大和滤波,最后利用电压比较器转化为方波形式向测速部分传输,作为前后光幕靶的启动触发信号和停止触发信号。
3) 测速部分。测速部分主要利用记录FPGA晶振振荡脉冲数目的方法来测定时间间隔,实现弹丸过靶的测速功能。
系统的结构框图如图2所示。
前后光幕对应的光电探测器接收到反射光信号,通过预处理和信号处理电路转化为方波信号[11],FPGA通过配置通用IO口的边沿检测类型实现启动触发和停止触发。弹丸飞过前光幕引起启动触发,计数器开始计数,直到弹丸穿过后光幕引起停止触发,计数器停止计数,这时的计数值和脉冲周期的乘积便是弹丸飞过前后扇形光幕的飞行时间。
2.2 光电转换部分
由于系统要求能有较大的探测场,设计选用功率为700 mW、波长为638 nm的一字线形激光器来构成前后激光光幕。为了满足一定的光幕范围,并尽量减小发散角来提高单位面积上的光功率密度,扇形激光光幕在2~3m距离左右至少有1 m2的探测范围,激光器的发散角不低于20°。
相对应于上面的激光器,该设计选用Hamamatsu公司生产的型号为S3588-09大受光面积光电二极管为光电探测器,它具有高灵敏度、低结电容(约为40 pF)、高速响应和高可靠性等特点,满足系统设计的要求。感光面积为30 mm×3 mm,在320~1 100 nm的波长范围内,响应度接近一致,对各种光都能够探测到。此外,对波长在960 nm时,达到最大的灵敏度0.66 A/W,在波长为638 nm时,灵敏度大概为0.51 A/W。典型的响应时间约为1.0 μs。当弹丸长度为40 mm并以800 m/s的速度通过扇形光幕,通过时间为25 μs,满足系统设计的要求。
用来聚焦微弱反射光的镜头选用焦距为60 mm,口径大小为75 mm的非球面镜。由于上述选用的光电探测器的感光面积为长条形,尺寸大小为长H=30 mm,宽H=3.0 mm,下面对光学系统放大倍数及视场角进行计算。
光学系统放大倍数为
(2)
这样20 mm×4 mm的弹丸在光电探测器上成像的尺寸约为0.5 mm×0.1 mm的亮点。系统的视场角为
(3)
计算结果满足要求。
系统的有效光信号面的长度(在2.5 m处)为
(4)
这样可以保证光幕范围达到要求,满足靶面积足够大的要求。
2.3 信号处理电路
光电探测器输出的信号为电流信号,且信号微弱,信噪比较低。信号处理电路是对光电探测器的输出信号先进行预处理,转换成电压信号,再进行滤波、放大和整形。总体包括4个部分,即预处理电路、滤波电路、放大电路和整形电路,如图3所示。
型号为S3588-09的光电二极管输出电流信号为μA级,系统采用跨阻放大电路进行预处理[12],其具有噪声低、带宽宽和跨阻适中、增益稳定等优点。如图4所示,通过跨阻R1使光电探测器S3588-09输出的微弱电流变化量转换为一定的电压量。R1取1 kΩ,则输出的电压约为mV级别。电路中光电探测器S3588-09处于反偏状态,可以加强内建电压,在无光照时暗电流非常小;在有光照时,光生载流子会更容易漂移,光电流会急剧增加。
经过预处理的电路,测试的信号主要包括两个部分:一个是激光的反射信号;另一部分是来自外界(背景光的瞬间变化、鸟类等飞虫飞过光幕所发生的漫反射信号)和电路内部的噪声信号(通常为高频信号)。这两种干扰信号干扰必须消除才能保证测量的准确性。鸟类等飞虫的飞行速度都在40 m/s以下,扇形光幕的厚度为4 mm,通过光幕产生的干扰的反射时间大于100 μs,与弹丸通过光幕时所产生的漫反射信号不在同一个频谱范围;电路内部的噪声通常为高频噪声,频率达到几百kHz甚至更高,要高于弹丸穿过光幕时所产生的漫反射信号频谱。为了得到被测信号的正确信息,需要滤除各种干扰噪声。滤波放大电路的作用是尽可能较大程度的放大有效信号,抑制交流噪声信号。
滤波放大电路是前级处理部分的关键部分。由于实际测量中的现场环境恶劣,有效信号经常受到外界干扰,高频信号和低频信号常混杂在有效信号之中[13]。为了最大程度的得到被测信号,系统采用高通滤波电路和低通滤波电路的级联方式实现带通滤波,然后再进行主放大。本次系统设计先对预处理后的信号进行二阶带通滤波,即先进行二阶高通滤波,随后再进行二阶低通滤波。电路的通频带通过弹丸的长度、弹丸的飞出速度和激光扇形光幕的线宽经计算得到的。
系统的探测对象为弹丸,这里取弹丸直径D=20 mm,长度H=40 mm,炮口的初速度取典型值为1 000 m/s。本系统使用的一字线形激光器在2.5 m处的扇形光幕宽度为l=4 mm,两平行光幕的距离为L=10 m。光幕经炮弹表面反射的激光信号的上升沿为4μs,由此可推算带通滤波电路的中心频率约为62.5 kHz,通带频率应该在20~200 kHz左右。
经过带通滤波电路滤波后信号放大了4倍,依旧是mV级别,没有达到电压幅值大小的要求,不便于后面转化为测速的触发信号。选用运算放大器OP37设计放大电路,采用±15 V双电源供电,将信号放大50倍以便于后续处理。OP37具有输入失调电压低、低噪声、转换速率高等优点,转换速率达到17 V/μs,所以完全满足弹丸过靶的设计要求。
主放大电路如图5所示,放大倍数为50倍,放大后的信号幅值达到1~5 V。
放大后输出的信号为不规则的波形,并不能作为触发信号。整形电路的核心器件为LM311电压比较器,具有很高的灵活性,能工作于5~30 V单个电源或正负15 V分离电源。LM311电压比较器配合AMS1117-3.3电压转换芯片,输出信号为幅值3.3 V的方波信号,可以直接作为后续以FPGA为核心的测速电路的启动、停止触发信号。
2.4 测速模块
FPGA不需操作系统,比ARM微处理器执行指令的速度快,具有快速处理信息能力,以硬件架构方式构建控制系统[14-15]。FPGA主控制器选用Altera公司Cyclone IV的FPGA芯片EP4CE6E22I7N,有8个用户I/O块,可使用的I/O口可达91个。该芯片等级为工业级,其工作环境温度范围较宽,可达-40 ℃~80 ℃。除此之外,芯片内部有两个PLL,每个PLL上可均有5个输出端,可进行动态重配置来改变时钟频率或相位。测速模块流程图如图6所示。
脉冲计数输出原理如下:系统上电,当前后光幕有弹丸通过时,经过光电探测器和信号处理电路后生成方波,分别产生启动触发信号和停止触发信号,当FPGA主控制器检测到启动触发信号的上升沿,计数器开始计数,启动指示灯亮,直到检测到停止触发信号的上升沿,计数器停止计数,启动指示灯熄灭的同时,停止指示灯闪烁一下,计数完成。这时计数器的值乘以系统时钟的周期即为弹丸经过双光幕的时间。此外,系统也设计了启动、停止按钮模拟前后光幕的触发信号,并提供了多种时标选择。
3 测试分析
完成系统初步设计之后,对计时模块进行时序仿真、逻辑分析,以验证该系统的可靠性,同时对时间测量精度进行了分析。
3.1 系统仿真分析
采用Verilog硬件描述语言编写脉冲计数程序,顶层文件采用图形化编程方式,模块化设计,便于拓展。编写并编译对应的Testbench文件,采用ModelSim软件对计时模块进行时序仿真,系统的计时例化模块与仿真波形如图7所示。
计时模块中各引脚定义如表1所示。由仿真波形可知,start1由低电平变为高电平时候,延迟一个时钟周期,到下个时钟周期的上升沿时,LED_Start变为低电平,计数器开始计数,直到遇到end1的上升沿,start1变为低电平,LED_End出现下降沿,计数器停止计数。T_out输出为周期100 ns、高电平为20 ns的周期信号,这样是为了便于后续的时标选择和数码显示。
时标选择和数码管显示仿真波形如图8所示。
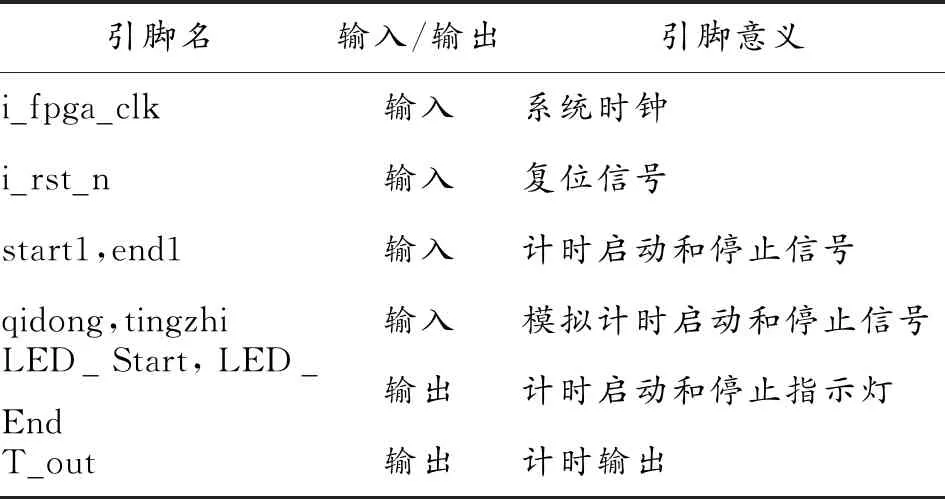
表1 计时模块各引脚功能定义
在时标选择和数码管显示的模块中,i_fpga_clk与i_rst_n分别为系统时钟输入和复位信号,T_in为该模块的输入信号(即计时模块中的T_out),shibiao为八个时标的选择,从最低位到最高位分别表示0.1 μs、1 μs、10 μs、0.1 ms、1 ms、10 ms、0.1 s、1 s,o_led_data0、o_led_data1、o_led_data2、o_led_data3、o_led_data4分别表示第0位、第1位、第2位、第3位、第4位数码管的显示值。图8中的shibiao为00000001,即选择时标为0.1 μs,则数码管读数为94.3 μs。计时启动、停止触发信号正常,时间读数显示正常。
3.2 时间测量精度分析
测速系统是由触发信号控制计数器的计数个数来实现测速功能。影响测量时间的主要因素有:
1) 光电探测器响应时间。本系统选用的高速光电探测器,典型的响应时间约为1.0 μs。
2) 处理电路延迟误差。处理电路误差主要有两个来源:信号处理电路的延迟误差和测速模块的延迟误差。信号处理电路利用有源滤波、放大、整流等模拟电路对光信号的处理,模拟电路延时较数字电路明显。信号经过滤波放大的典型上升沿为2.0 μs,测试模块的延迟可控制在1.0 μs以内。
假定弹丸的速度为800 m/s,前后光幕靶的距离为15 m,计数时钟为50 MHz,时钟周期为20 ns。弹丸通过前后光幕靶的时间间隔为T=15/1 000=0.015 s。相对误差为:
(5)
4 结论
1) 本文提出的基于FPGA的反射式光幕测速系统研制方案,采用反射的激光信号作为系统的触发信号,并用FPGA作为测速的主要控制芯片,可以提高测量的精度,同时简化了测速装置,调节方便。
2) 通过对主要模块的测试,验证了该设计方案的可行性。从设计原理上分析可以测出口径大于20 mm、飞行速度在200~2 000 m/s的弹丸飞过光幕的速度,且精度较高。
3) 该系统的探测电路的信噪比还可提高。
