基于CEEMDAN与奇异值分解的往复机械故障诊断方法研究
2018-08-30别锋锋徐鹏青裴峻峰张仕佳
别锋锋,徐鹏青,裴峻峰,张仕佳
(常州大学 机械工程学院,江苏 常州 213164)
往复机械广泛应用于各类工业系统,由于其结构及工作环境较为复杂,因此,往复机械动力学特性难以分析[1]。一旦发生故障,轻则机器运转异常,产生强烈噪声与振动,重则导致人员伤亡,所以对往复机械故障的监测与诊断尤为重要[2]。由于往复机械部件繁多,结构复杂,运行环境恶劣,其振动信号往往会夹杂各种干扰成分,而且其信号本身具有很强的非线性、非平稳性,这些技术难题导致往复机械故障诊断无论在理论研究还是在诊断方法研究方面都存在着很大的不足[3]。N.E.Huang等在1998年提出的一种时频分析方法,即经验模态分解(Empirical Mode Decomposition,EMD)[4],该方法能将非平稳信号分解为若干个基本模式分量之和,因此被广泛应用在振动信号特征提取中。然而EMD方法存在着模态混叠的缺点,为此HUANG和Yeh两人先后提出了总体经验模态分解(Ensemble Empirical Mode Decomposition,EEMD)[5]和一种补充的总体经验模态分解方法(Complementary Ensemble Empirical Mode Decomposition,CEEMD)[6]。但是这两种方法在实际应用中也存在着不足,如当参数选择不合理时,分解会出现较多的虚假分量。因此Torres M E针对这些问题提出了一种改进算法CEEMDAN(Complete Ensemble Empirical Mode Decomposition with Adaptive Noise),通过加入自适应的噪声来减小模态混叠,并且能有效地减少计算时间,克服了EEMD和CEEMD的不足,具有一定的优越性[7]。
本文针对往复机械的振动信号特征难以提取的现状,提出了一种基于CEEMDAN与奇异值相结合的方法来对往复机械故障诊断进行研究,采用CEEMDAN作为振动信号特征提取的工具,将分解得到的IMF分量的奇异值作为支持向量机(Support Vector Machine,SVM)分类器的特征向量,对SVM进行训练,从而实现对往复机械故障模式的识别。本文第二部分采用该方法对实验室往复泵的模拟故障进行分析,并与EEMD方法进行对比,验证该方法的有效性。第三部分进一步对工程现场泥浆泵复杂工况下的多故障模式进行识别研究,从而进一步论证该方法对于往复机械振动信号特征提取的有效性。
1 原理方法
1.1 EEMD
EEMD算法是在克服EMD的模态混叠效应的基础上提出来的[8]。EEMD算法利用高斯白噪声的统计特性,使叠加了白噪声的信号在不同频率上具有连续性来解决模态混叠效应。它通过在原始信号上叠加高斯白噪声,并且进行多次EMD分解后,将得到的IMF分量的均值作为最终结果[9]。假定一往复机械测得的原始振动信号为x(t)。
(1)在x(t)中加入白噪声ni(t)

(2)对xi(t)进行EMD分解,从而得到各个IMF分量IMFm,p,其中IMFm,p为第m次加入白噪声得到的第p个IMF分量
(3)重复(1)、(2)操作,计算M次分解得到的IMF分量的均值,即

1.2 CEEMDAN
CEEMDAN是在EEMD基础之上提出的一种信号处理方法,将原始信号x(t)进行以下处理:
(1)通过EMD实现对xi(t)的一次分解得到第一个模态分量

(2)在第1阶段(k=1)时计算第一个余量

(3)定义Ek表示通过EMD计算获得的给定信号的第k个模态分量,wi(t)为满足N(0,1)的白噪声,分解信号直到得到第一个EMD模态分量,同时,定义第二个模态分量

(4)当k=2,3,4,…,K时,计算第k个余量


(6)重复步骤(4),直至余量不适合被分解时停止。
1.3 奇异值
因为可用奇异值表征矩阵的特征,因此,采用奇异值表征各个IMF特征矩阵A的特征,构建特征向量[10]。方法如下:设每个IMF分量由n个量组成,m个IMF分量组成m×n的矩阵A,必存在正交矩阵U∈Cm×m和V∈Cn×n,使得A=USVT,其中

且∑=diag(λ1,λ2,…,λr),r=rank(A),其矩阵A的奇异值由高往低排列,即λ1≥λ2≥…≥λr。由矩阵奇异值的性质可知,特征向量σ=(λ1,λ2,…,λr)唯一表征了通过CEEMDAN分解而得到的各个IMF系数矩阵的特征。各个IMF系数矩阵的奇异值可反映信号的特征,而奇异值组成的特征向量可以表征IMF系数矩阵的特征,所以该特征向量可以反映出信号的特征[11]。
1.4 支持向量机
支持向量机是Vapnik在1996年针对线性不可分的两类问题的最优分类形式提出来的分类器,目标是找到一个最优分割超平面[12]。即通过构造分类超平面使两类问题得到最优分割[13]。将奇异值组成训练数据集合T={(xi,yi)/i=1,…,l},其中xi为奇异值,yi∈Y={+1,-1},i=1,…,l。将QP问题转化为相应的对偶问题来解决

式中:C是惩罚参数,ξi是收缩变量。式(10)的对偶形式由式(9)表示
式中α∈Rl是Lagrangian因子。根据优化问题表达式(9)的解α*,可求得最优分类超平面的参数ω和b

式中:NSU代表支持向量个数,最终的判定函数为

通过判定函数f(x)来对特征值进行分类。
2 臂板实验论证
2.1 实验方法
使用灵敏度为102 mV/g的加速度传感器进行信号采集,采样频率为2 000 Hz,通过对实验室往复泵进行实验仿真,分别模拟往复泵在正常状态下与轴瓦磨损故障状态下的运动情况,故障一为轴瓦轻微磨损,故障二为轴瓦严重磨损,分别提取其振动信号并分析研究,并且通过比较CEEMDAN与EEMD两种分解方法的处理结果,来验证该方法的有效性。
采用CEEMDAN-SVD结合支持向量机的信号处理方法对往复机械进行故障诊断,具体的流程图如图1所示。
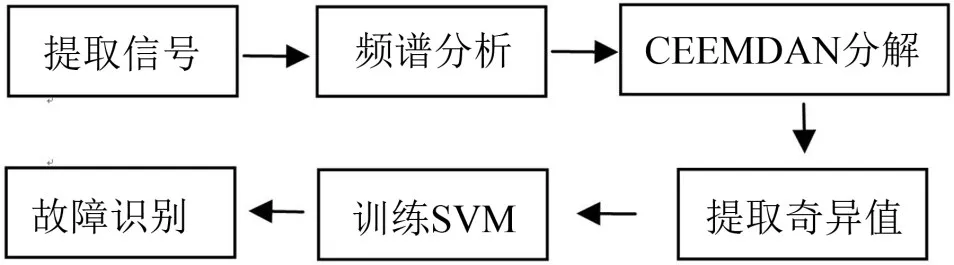
图1 故障诊断流程图
2.2 实验仿真
实验平台如图2所示,包括往复泵、加速度传感器、Iotech640系列掌上型动态信号分析仪以及PC端,并在如图2所示位置进行试验测点的布置。
首先对加速度传感器采集到的信号进行CEEMDAN分解。
由图4、图5可知,采用CEEMDAN分解方法将原始非平稳信号分解成若干个平稳的IMF分量,根据CEEMDAN的特性,前8个IMF分量与原信号的相关性较大,可以表征出原始信号中故障信息的主要特征,因此本文提取前8个IMF分量做进一步分析。
采用奇异值表征前8个IMF分量的特征向量。

图2 试验平台布置图

图3 测点布置图
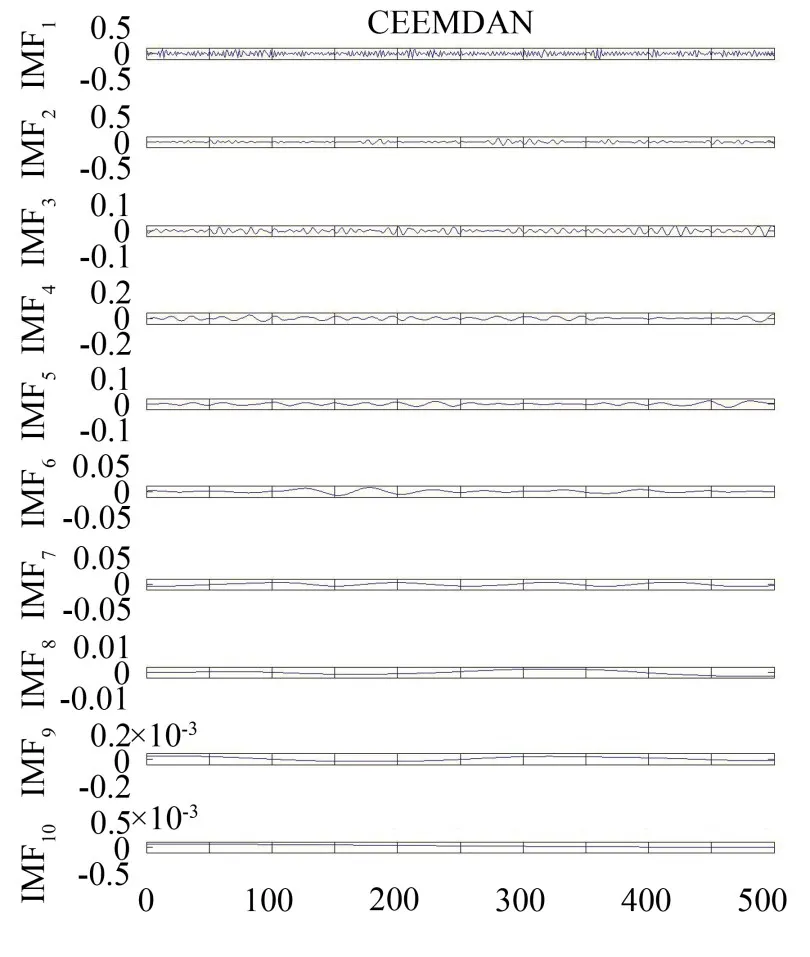
图4 正常状态
由表1的前3个IMF分量,可以清晰地看出正常工况下的奇异值与故障状态下的奇异值有明显不同,故障状态下的振动信号与正常状态下相比具有更大的奇异值。
为了更好验证该方法的有效性,对正常、故障一和故障二信号各提取10组,组成30组样本。将提取到的30组经CEEMDAN分解的奇异值样本进行试验。训练SVM多故障分类器时,抽取15组样本用于训练,其余15组用于测试。训练时,将选取的正常信号样本视为+1,故障一信号的样本视为0,故障二信号的样本视为-1。
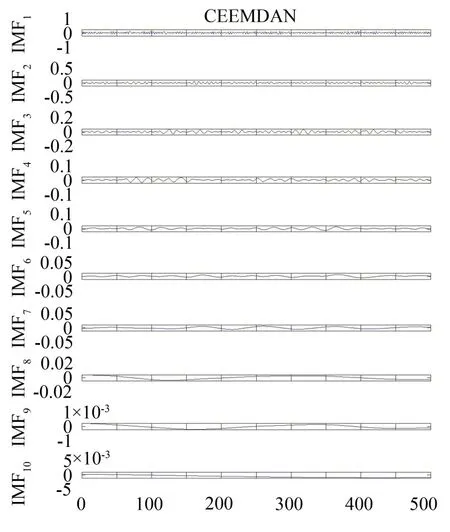
图5 故障状态

表1 特征向量
如图6所示,SVM识别结果表明通过CEEMDAN分解,往复泵的故障均被识别。为了能和CEEMDAN进行对比,本文选择经EEMD分解的IMF1-IMF8的奇异值作为另一组样本进行SVM多故障分类器测试。
如图7所示,对比结果表明,通过CEEMDAN分解的样本识别率达到100%,而通过EEMD分解的样本识别率只有86.7%,实验结果表明CEEMDAN分解的精确率更高,分解效果更好。
通过上述实验,表明CEEMDAN分解方法对往复泵不同程度故障有着很好的处理效果,对比实验也显示出改进方法的优越性。为了进一步验证该方法的有效性,将该方法运用于工程中,验证该方法对于故障冲击特征的识别率。
3 工程实际论证
3.1 试验方法
采用3NB-1300泥浆泵动力端作为研究对象,通过使用掌上型动态信号分析仪和加速度传感器等设备进行振动信号的采集,识别故障的类型。

图6 经CEEMFAN分解后故障识别图

图7 经EEMD分解后故障识别图
在如图8所示测点位置布置加速度传感器,采集泥浆泵振动信号。

图8 泥浆泵测点布置及传感器和测试仪器
泥浆泵转速为1 200 r/inm,采样频率为5 000 Hz,采样点为5 000。分别提取具有正常、故障一、故障二和故障三四种状态的加速度传感器所测得的振动信号,用本文所提出的方法进行分析,获取特征分量信号的奇异值特征值,并利用支持向量机进行分类和故障模式识别。
3.2 信号分析
首先对采集到的振动信号进行频谱分析。
在上述四种频谱图中,图9中能量主要集中在500 Hz以内。

图9 正常信号频谱图
图10中能量最高峰明显比图8更明显。
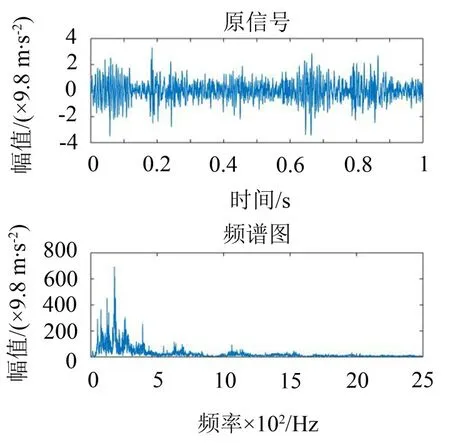
图10 故障一频谱图
图11中能量分布较为分散,最高峰分别在200 Hz与2 100 Hz处。而图12在100 Hz处有极强的能量产生,由根据能量的不同分布可以判断泥浆泵是否含有故障,但是并不能准确识别泥浆泵的故障类型,因此,需要进一步进行特征提取与分析。
首先,对信号进行CEEMDAN分解,采用奇异值表征各个IMF分量的特征向量。
由表2可以看出,正常状态下与故障状态下的奇异值存在着显著差异。为了更好地分析识别方法的有效性,基于特征提取结果建立训练样本集,并将其应用于SVM。将采集到的80组信号样本分别对应正常信号、故障一、故障二、故障三进行试验,选图14为泥浆泵SVM故障模式识别图,由图可知用于测试的40组样中本仅一组未被识别,识别率取40组特征向量输入支持向量机用于训练,训练时,正常样本视为+1,故障一样本视为0,故障二样本视为-1,故障三样本视为-2,其余40组作为测试样本输入,分别对应正常、故障一、故障二和故障三等四种状态。

图11 故障二频谱图
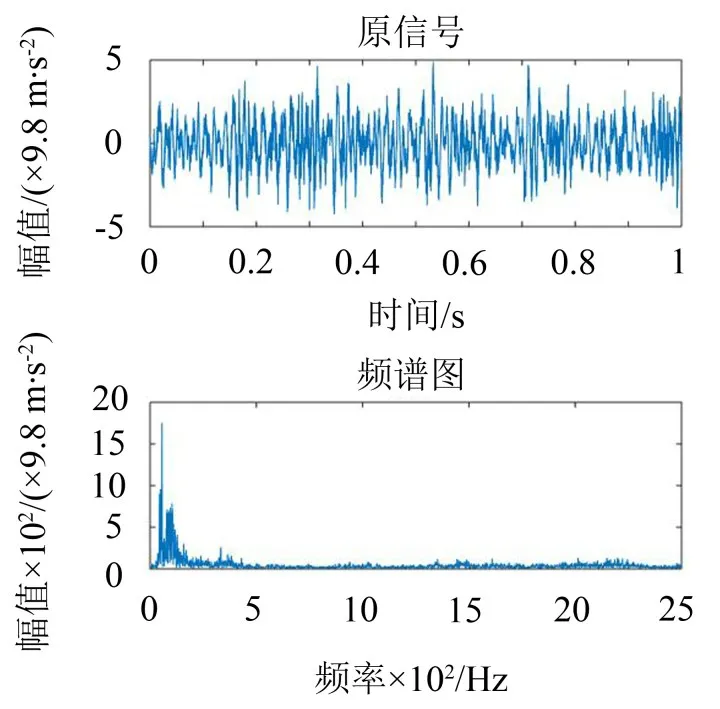
图12 故障三频谱图
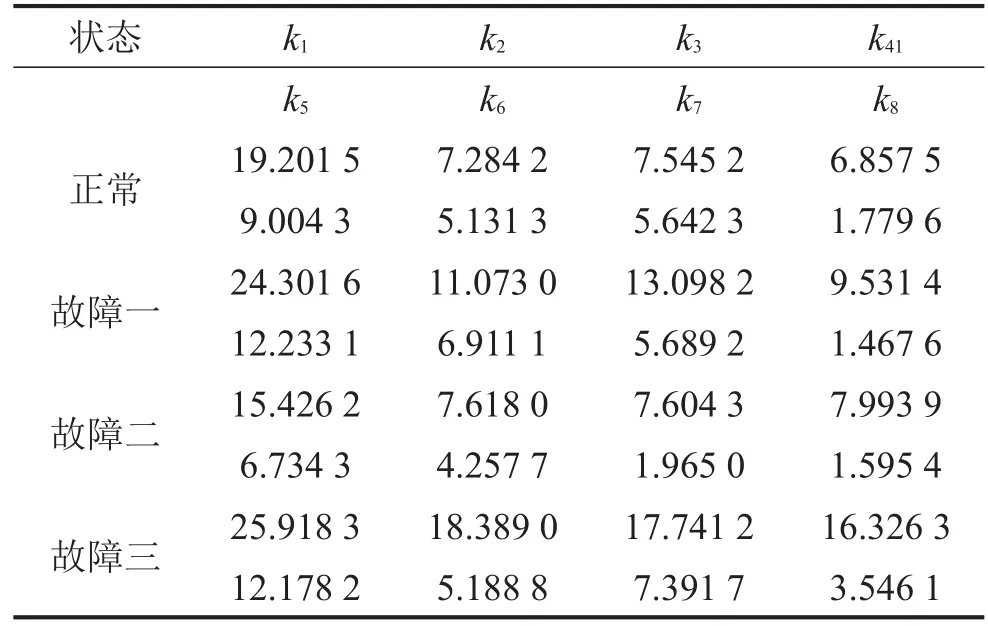
表2 特征向量
图14为泥浆泵SVM故障模式识别图,由图14可知用于测试的40组样本中仅一组未被识别,识别率达到97.5%,证明该方法在工程应用中能有效识别故障特征。
通过工程现场拆卸诊断可知,故障一、故障二、故障三分别是由三种不同的故障引起的,由此可知该判断方法的准确性。上述分析表明,对原始振动信号进行CEEMDAN分解,提取各个IMF分量的奇异值作为特征向量,由特征向量可反映振动信号的能量变化,用于往复泵的故障诊断。

图13 信号的CEEMDAN分解

图14 泥浆泵故障识别图
4 结语
针对往复机械振动信号的非线性、非平稳性,本文提出了一种基于CEEMDAN-SVD的信号处理方法,并以SVM信号识别来验证方法的有效性。利用CEEMDAN将往复泵与泥浆泵故障状态振动信号分解,以奇异值描述代表故障主要信息的各个IMF分量形成特征向量,并以SVM作为模式分类器识别故障类型。从实验仿真到工程实例以及与EEMD的对比实验,均表明基于CEEMDAN-SVD与SVM相结合的判断方法能有效对往复机械的工作状态和故障类型进行识别,具有良好的准确性与稳定性,因而更适用于非平稳性故障模式识别。
