正则化的加权不完全鲁棒主成分分析方法及其在无线传感器网络节点轨迹拟合中的应用
2018-08-28孙莞格夏克文
孙莞格,夏克文* ,兰 璞
(1.河北工业大学电子信息工程学院,天津300401; 2.河北省大数据计算重点实验室(河北工业大学),天津300401)
(*通信作者电子邮箱19289037@qq.com)
0 引言
无线传感器网络(Wireless Sensor Network,WSN)是大量无线传感器通过自组织的方式而组成的无线网络[1-2]。在复杂多变的应用环境中,移动无线传感器网络需要根据节点的实际移动情况对数据进行采集分析,传感节点的位置和轨迹信息多次发送会增加网络的能量消耗。传感器节点自身的能量有限的,怎样才能延长WSN的运行时间,是WSN的重点研究问题。
无线传感器网络节点的轨迹拟合方法有很多,目前比较普遍的分类方法有基于频繁路径的轨迹拟合、基于马尔可夫模型的轨迹拟合、基于Kalman滤波的轨迹拟合和基于线性回归的轨迹拟合。这些方法在轨迹拟合方面各具优势,但仍存在一些问题:前两种方法计算量大、算法运行时间长[3];后两种方法耗时少,但在节点移动轨迹的转折处或者当数据出现严重缺失时出现了失真[4]。
近几 年,低 秩 矩 阵 恢 复 技 术[5](Low Rank Matrix Recovery,LRMR)将向量的稀疏表示模型扩展到低秩矩阵中,使它成为继压缩感知之后又一个有潜力的处理大规模数据的信号处理方法。低秩矩阵恢复包括鲁棒主成分分析(Robust Principal Component Analysis,RPCA)和矩阵补全(Matrix Completion,MC)。冯绪等[6]将矩阵补全应用到无线传感器网络节点的轨迹拟合当中,采用稀疏矩阵奇异值分解方法 (Sparsity Rank Singular Value Decomposition,SRSVD)方法把原问题松弛为非凸优化问题,可将目标函数简化为两个矩阵的F范数之和,在降低数据采样比例的情况下仍能有效地对移动轨迹进行恢复。鲁宁等[7]对求解鲁棒主成分分析的严格增广拉格朗日(Exact Augmented Lagrange Multiplier,EALM)算法进行了粗寻优和细寻优的结合,提出了半精确增广拉格朗日(Semi-Exact Augmented Lagrange Multiplier,SEALM)算法,提高了求解速度。然而SRSVD方法对稀疏噪声敏感,SEALM算法在采样比例小时能准确地拟合。此外,这两种方法都需要假设不存在高斯噪声,该假设往往不能严格符合实际情况。
为使整个系统在存在高斯噪声时仍能有效且稳定,本文先将基于鲁棒主成分分析和矩阵补全的不完全鲁棒主成分分析(Incomplete Robust Principal Component Analysis,IRPCA)方法应用于节点的移动轨迹拟合;再在IRPCA的基础上进行改进,分别对低秩矩阵和稀疏矩阵进行加权,然后将高斯噪声矩阵的F范数作为正则项,最后应用于节点的移动轨迹拟合。
1 WSN系统模型
设无线传感器网络中有W个节点,每个传感器节点在相同的时间间隔移动N次,而且要在每次移动之后记录节点当前的坐标信息。很明显,随着节点的不断移动,要传输和存储的坐标信息不断增加,无线传感器网络系统所消耗的能量也在迅速增多,因为所有节点的坐标信息都要存储。如果可以通过采样降低坐标信息的传输量,再通过特定的恢复算法对未采样节点的坐标信息进行恢复,就能够很大程度地降低坐标信息的传输量,从而减少整个系统的能量消耗。
为此,用坐标信息矩阵表示模型[6-7],如式(1)所示,其中设矩阵X为2W×N阶的节点位置信息矩阵,即:

可以很容易地发现,当节点在匀速移动时,矩阵X拥有秩为2,因此该矩阵是一个低秩矩阵。但这仅仅是理想情况,在现实情境中,节点不一定可以以一个固定的速率移动,通常在此处认为它是有规律性的,所以可以判断出来矩阵X含有低秩性[8]。
为了对节点坐标信息矩阵进行稀疏处理,对矩阵X根据节点的位置进行采样分析,形成采样矩阵T,如式(2)与式(3)所示:

令D是经过采样后测量得到的节点位置信息矩阵,如式(4)所示:

其中“.×”表示矩阵之间的点乘。
在WSN中,可以在真实测量中获取矩阵D,其中矩阵D只拥有并不完全的节点坐标信息。通过D恢复出原始完整的坐标信息矩阵X就可使用低秩矩阵恢复算法,主要是矩阵补全方法和鲁棒主成分分析方法。
1)矩阵补全方法(MC)[9]:当数据矩阵D含缺失元素时,可根据矩阵的低秩结构来恢复矩阵的全部元素。矩阵补全可描述为矩阵核范数最优化问题:

其中:矩阵A为待求解低秩矩阵;Ω为矩阵D采样元素对应的下标 集 合;PΩ(·) 为 正 交 投 影 算 子; [PΩ(M)]ij=
对于优化问题式(5),则可以通过增广拉格朗日算法解出原始低秩矩阵,比如文献[6]将矩阵补全应用到无线传感器网络节点的轨迹拟合当中,通过SRSVD方法对非凸优化问题进行松弛,把矩阵的秩松弛到矩阵的F范数,并转化为非约束优化问题,在降低数据采样比例的情况下仍能有效地对移动轨迹进行拟合。
2)鲁棒主成分分析方法(RPCA)[10-11]: 已知矩阵 D,并且D=A+E,其中A和E未知,但先验信息A是低秩矩阵,E是稀疏矩阵且非零元素可任意大。为刻画矩阵A的低秩性和矩阵E的稀疏性,可以极小化矩阵A的核范数和矩阵E的l1范数来构造最优化问题:

其中:‖X‖1等于矩阵X所有元素绝对值的和;‖X‖*等于矩阵X所有奇异值的和;λ是低秩矩阵和稀疏矩阵的折中因子。
对于优化问题式(6),可以通过增广拉格朗日算法交替更新A和E,即可恢复出原始低秩矩阵。文献[7]在求解RPCA的EALM算法中对单一低秩矩阵和噪声矩阵作局部粗寻优,对恢复矩阵元素作全局细寻优,提出了SEALM算法,加快了求解速度。
上述两种模型均存在各自的缺点,比如SRSVD方法不能准确地处理存在大量稀疏噪声的情形,EALM算法不能处理采样比例小的情况。为了弥补两种模型的不足,使之能够处理存在大量稀疏噪声且有大量元素缺失(即采样比例小)的情况,文献[12]把RPCA和MC进行了结合,提出了不完全鲁棒主成分分析(Incomplete RPCA,IRPCA):

然而实际工作中往往存在高斯噪声,上述方法均不能有效地抑制高斯噪声,本文的工作先将IRPCA应用到无线传感器网络轨迹拟合,再假设当存在高斯噪声时,如何改进算法才能有效地通过D恢复出原始完整的坐标信息矩阵X,然后进行轨迹拟合。
2 正则化的加权IRPCA方法
2.1 正则化的加权IRPCA模型的提出
标准核范数平等地对待所有的奇异值,为了更好地刻画低秩矩阵的低秩性,可对低秩矩阵的奇异值进行加权,较大的奇异值通常包含了较多的信息,应该分配较小的权值以减小阈值收缩幅度,较小的奇异值应该分配较大的权值来增大阈值收缩幅度。同样地,标准l1范数平等地对待所有的矩阵元素,为了更好地描述稀疏矩阵的稀疏性,对于较大的矩阵元素应该用较小的权值来降低其影响,对于较小的矩阵元素应该用较大的权值提高其影响[13]。为此提出加权的不完全鲁棒主成分分析(Weighted IRPCA,WIRPCA)的数学模型:

考虑到在实际环境中往往存在高斯噪声,用F范数刻画高斯噪声作为目标函数的正则项,可对高斯噪声有较强的抑制作用,拟合效果更加准确和稳定。为此提出正则化的加权不完全鲁棒主成分分析(Regularized WIRPCA,RWIRPCA)的数学模型:

2.2 数学模型的求解
式(9)可变形为:

为了变形求解的需要,通过引入n1×n2维实矩阵变量M,模型式(10)可重新表示为:

为求解式(11)改进的RWIRPCA模型,首先要考虑权重ωA和ωE的取值。由于权重的取值与被加权部分成反比[14],即ωA的取值与低秩矩阵A的奇异值成反比,且ωE的取值与稀疏矩阵E的元素成反比。RWIRPCA的权值更新算法步骤如算法1所示。
算法1 权值更新算法步骤。
输入 观测矩阵 D ∈ Rn1×n2,采样集合 Ω,参数 λ,τ,μ,εA,εE;
输出 最优解A,E,Z,M。
2) 交替迭代更新矩阵A,E,Z,M。
4) 若迭代收敛或i达到最大迭代次数,输出最优解A,E,Z,M。
在确定了权值ωA和ωE后,在式(11)中,ωA和ωE相当于常数,接下来可采用非严格拉格朗日乘子法(Inexact Augmented Lagrange Multipliers,IALM)对步骤2进行求解,在求解之前先引入两个定理。
定理1 软阈值算子[15]:设 G是n1×n2维实矩阵,则优化问题的最优解是X*=Sε(G),第(i,j) 元素为 max(|gij|- ε,0)sgn(gij),其中ε>0。
定理2 奇异值收缩算子[16]:优化问题min
X{ε‖X‖*+,具有闭解 X*=Dε(G),其中 Dε(G)=USε(Σ)VT,UΣVT是矩阵G的奇异值分解结果。
采用IALM求解式(11),其增广拉格朗日函数为:

其中:μ>0为惩罚参数;Y∈Rn1×n2为增广拉格朗日乘子矩阵。
由交替方向乘子法可知,式(12)应用变量交替更新的方式进行迭代求解,其具体过程为:
固定 E,Z,M,更新 A:
由定理2推理得:

固定 A,Z,M,更新 E:

由定理1推理得:

固定 A,E,M,更新 Z:

对式(18)求导并令导数为0,得:

易得:

固定 A,E,Z,更新 M:
其中Ω表示Ω的补集。
最后更新Y:

按照上述步骤进行交替更新,迭代收敛后可得到式(11)的最优解。算法2给出了IALM算法求解RWIRPCA的步骤。
算法2 IALM算法求解RWIRPCA模型。
输入 观测矩阵 D ∈ Rn1×n2,采样集合 Ω,参数 λ,τ,μ,ωA,ωE;
输出 最优解A,E,Z,M。

3 实验结果及分析
本实验使用Matlab R2014b进行仿真分析,运行环境基于Windows10操作系统平台,内存8.00 GB,处理器为Intel Core i5 CPU,主频参数为2.40 Ghz。在式(1)中的位置信息矩阵X中包含了任意节点在任意次移动后的横纵坐标信息,令(xi,j,yi,j) 作为节点 i在发生了第 j次移动后获得的横纵坐标,(^xi,j,^yi,j)为求解得到的估计坐标,坐标信息矩阵估计值 ^X可以提供此节点使用恢复算法得到的横纵坐标,则可定义矩阵X与^X之间的均方根误差如式(23)所示:

式中n为观测次数。
具体实验流程如图1所示。
为考察改进的RWIRPCA方法在不同情形下的性能,设计了3组不同的实验。实验1考察RWIRPCA方法在采样比例小且稀疏噪声大的条件下的拟合效果,实验2考察RWIRPCA方法在高斯噪声条件下的拟合效果,实验3考察RWIRPCA方法在稀疏和高斯混合噪声条件下的拟合效果。
3.1 实验1:稀疏噪声与采样比例实验
本实验假设坐标信息矩阵数据仅包含稀疏噪声,稀疏噪声大小为5000 dB~10 000 dB随机产生,稀疏噪声比例分别设定为0%、5%、20%这3种。当稀疏噪声比例分别设定为0%、5%、20%时,图2显示了在对原始坐标矩阵进行不同比例采样情况下 SRSVD方法、SEALM方法、IRPCA方法和RWIRPCA方法拟合误差的变化情况
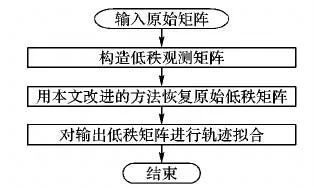
图1 实验流程Fig.1 Experimental process

图2 不同稀疏噪声比例时,节点轨迹拟合误差对比Fig.2 Comparison of node trajectory fitting error under different sparse noise ratio
由图2可以明显看出,SRSVD在稀疏噪声条件下效果较差,即使当采样比例高达80%时拟合误差仍在0.11以上。SEALM在采样比例较小时也就是有大量元素缺失时效果较差,即使当稀疏噪声比例为0时拟合误差仍在0.20以上。而对于IRPCA和RWIRPCA在稀疏噪声大且采样比例较小时仍能取得比较稳定的拟合效果,尤其是RWIRPCA与其他3种方法相比,体现了高度的优越性。
3.2 实验2:高斯噪声实验
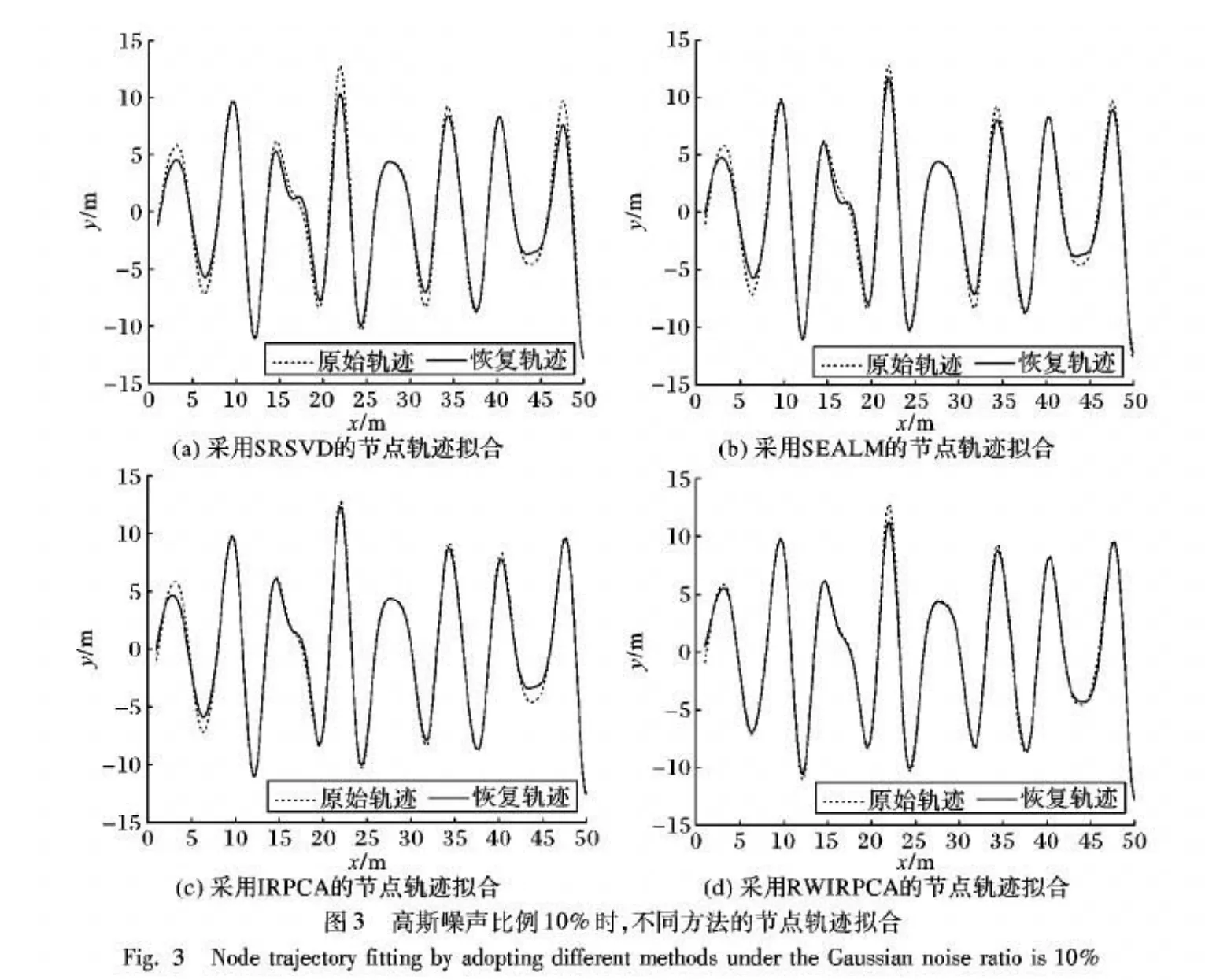

图4 高斯噪声比例50%时,不同方法的节点轨迹拟合Fig.4 Node trajectory fitting by adopting different methods under the Gaussian noise ratio is 50%
本实验假设坐标信息矩阵数据仅包含高斯噪声,设置其均值为0,标准差为100。在噪声比例为10%、20%、30%、40%、50%分别采用SRSVD方法、SEALM方法、IRPCA方法和RWIRPCA方法分别进行移动WSN节点轨迹拟合。当噪声比例为10%和50%时,通过仿真图来表示第一个移动节点的运行轨迹。图中节点移动次数为100,网络覆盖区域为(0,-15)~(50,15),其拟合仿真图形分别如图3~4所示,图中x与y分别代表该节点移动的横坐标与纵坐标。
由图3~4可以明显看出,当噪声比较小时(如高斯噪声比例为10%),方法改进前后的拟合效果差距不明显,但随着高斯噪声比例增大到50%时,SRSVD、SEALM、IRPCA出现了明显的失真,而改进后的RWIRPCA拟合效果仍然保持相对稳定。
为了进一步分析对比采用 SRSVD、SEALM、IRPCA和RWIRPCA优化WSN节点轨迹拟合问题的效果,对仿真实验的效果通过表格和图示的方式进行展示与分析。在不同噪声比例下,4种方法的优化效果比较如表1所示。
从表1中不同的误差以及运行时间可以看出,SEALM用时最长,SRSVD拟合误差最大。在IRPCA和RWIRPCA运行时间相近的情况下,就拟合误差来说,RWIRPCA要比IRPCA低,拟合效果更好。尤其随着噪声比例不断增长RWIRPCA的拟合效果依然优于IRPCA,RWIRPCA的优势更加明显;当噪声比例不断增大到50%时,IRPCA的拟合误差高达0.17 m,而RWIRPCA的拟合效果依然保持稳定。从而可知,当外界存在高斯噪声时,改进的RWIRPCA可以提高移动节点拟合的准确性,从而提高整个无线传感器网络的稳定性。

表1 不同高斯噪声比例时采用不同方法的拟合效果比较Tab.1 Comparison of trajectory fitting results by adopting different methods under different Gaussian noise ratio
3.3 实验3:混合噪声实验
本实验假设坐标信息矩阵数据包含稀疏噪声和高斯噪声,稀疏噪声大小由5000 dB~10000 dB随机产生,高斯噪声均值为0,标准差为100。不同大小混合噪声比例情况下分别采用IRPCA方法和改进的RWIRPCA方法进行移动WSN节点轨迹拟合误差的变化情况如图5所示。

图5 不同混合噪声比例时轨迹拟合误差对比Fig.5 Comparison of trajectory fitting error under different mixed noise ratio
由图5可以看出,当坐标信息矩阵数据包含不同程度大小的混合噪声时,与 SRSVD、SEALM、IRPCA相比,改进的RWIRPCA有更低的拟合误差,拟合效果更好。当混合噪声逐渐增大时,SRSVD、SEALM、IRPCA的拟合误差迅速上升,而RWIRPCA的拟合误差依然保持相对稳定,具有更准确的拟合效果。可见当稀疏噪声和高斯噪声同时存在时,RWIRPCA具有更高的拟合精度,在实际应用中更具优势。
4 结语
在无线传感器网络轨迹拟合中,为了降低信息的传输量,减少无线传感器网络的能量消耗,采用LRMR是切实可行的,然而目前使用的LRMR还存在对噪声敏感、大量元素缺失时拟合精度差等问题,为此需研究改进的LRMR模型方法。
为此,本文提出了一种改进的正则化加权IRPCA方法,即在IRPCA基础上矩阵先进行范数加权,然后加入噪声矩阵的F范数作为正则项。不同比例的稀疏噪声、高斯噪声和混合噪声的详细实验与结果对比表明IRPCA和RWIRPCA都可处理采样比例小且稀疏噪声大的情况,而RWIRPCA在拟合效果上更具优势。尤其当存在高斯噪声或混合噪声时,RWIRPCA的优势更加明显,在拟合效果和误差上远远优于SRSVD、SEALM和IRPCA,将其应用到无线传感器网络节点轨迹的拟合当中可以更方便地管理移动节点,减少频繁传输节点的位置和轨迹信息带来的能量消耗,从而使整个无线传感器网络系统更加稳定、更加节能。
